 On Wednesday 6th February, Curiosity used its drill for the very first time to cut into a rock on Mars – the first time such an operation has ever been undertaken on the Red Planet.
On Wednesday 6th February, Curiosity used its drill for the very first time to cut into a rock on Mars – the first time such an operation has ever been undertaken on the Red Planet.
The operation wasn’t a sample-gathering one, or even an attempt to obtain surface material for use in “cleaning” the internal sample collection feeds in the drill. It was what NASA referred to as a “mini drill test” designed to ensure the drill behaved as anticipated when combining both the drilling and hammer actions, and to generate cuttings which could be used to confirm the inside of the rock – dubbed “John Klein” in tribute to former Mars Science Laboratory deputy project manager John W. Klein, who died in 2011 – would provide material suitable for processing by the rover’s sample handling mechanisms.
The borehole resulting from the operation cut just 2 centimetres into the rock, but it provided enough material for initial visual analysis using the Mars Hand Lens Imager MAHLI), also mounted on the rover’s robot are along with the drilling mechanism.

Two images taken by the telephoto lens of the rover’s Mastcam system were taken to present a before-and-after “blink” image of the drill site, with the first image capture on Sol 178 (February 4th), prior to drilling, and the second captured on Sol 180 (February 6th), immediately after drilling had been completed and the turret rotated out of the way. In the second image, the results of the drilling can clearly be seen – not just with the hole and surrounding cuttings, but in the way that vibrations from the drill’s cutting / hammering has shaken dust and debris from the surrounding veins in the rock, most notably those at the bottom of the image.
Once drilling had been completed, Curiosity manoeuvred MAHLI into position over the hole to capture a range of close-up images which would be used to visually analyse the cuttings and assess their suitably for sample processing. The first of these images returned to Earth revealed a near-perfect borehole, leading members of the mission team to dub it “sweet baby”.

Visual analysis of the images is liable to continue for the next few days, and will likely be coupled with use of the Chemical Camera (ChemCam) system with its powerful remote imager system, prior to a decision being made as to whether material yielded by the rock is suitable for further processing.
Providing engineers and scientists are satisfied, a further drilling operation will take place on the same rock, with the aim of cutting a borehole some 5cm deep. This will be deep enough for cut material to be pushed up behind the drill head and into the sample collection mechanism behind it. These cuttings will then be used to “clean” the internal elements of the drill’s sample-gathering system, prior to being passed to CHIMRA – the Collection and Handling for In-situ Martian Rock Analysis system, used to pre-process samples for delivery to Curiosity’s on-board science instruments – and dumped.
Once engineers are satisfied that the drill’s internals have been suitably cleaned of any remaining microscopic contaminants from Earth, material gathered by it will be delivered to CHIMRA for processing and delivery to the Chemical and Minerology (CheMin) and Sample Analysis at Mars (SAM) instruments on board the rover proper.
All of this operations are expected to commence this coming week, and will mark the opening of yet another new chapter in Curiosity’s history.
A Further Self-portrait
Prior to carrying out the final drill tests, a series of commands were uploaded to Curiosity, instructing it to gather several dozen exposures of itself as it sits on “John Klein”. The aim of the exercise was to gain further views of the rover’s general condition, combining both “wide-angle” and “close-up” shots of the rover and its components.
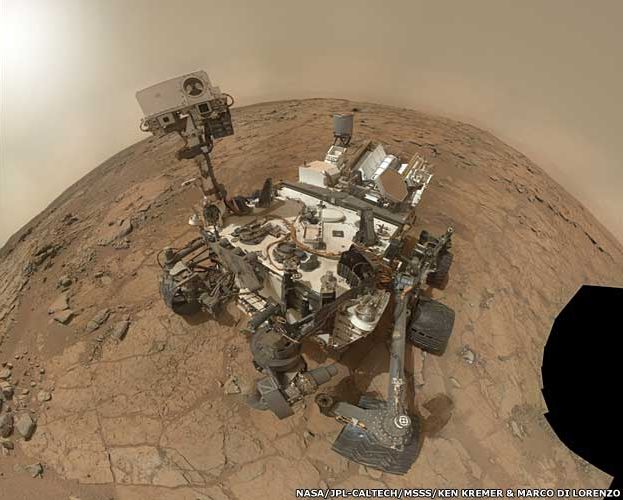
Some 66 of these images, gathered on Sol 177 (February 3rd), were combined into a mosaic showing the rover parked on “John Klein” to give a remarkable “in-situ” self-portrait, in which all of the major components of the rover can be seen, other than the robot arm itself (although the arm’s “shoulder” joint can be seen next to the rover’s wheel in the bottom right of the picture). At the back of the rover is the nuclear power unit, with the communications systems on either side of it (the “tin can” of the low-gain antenna to the left and the hexagonal high-gain antenna to the right). Front left of the picture is the mast system, with the ChemCam system with the Mastcam and NavCam cameras directly under it facing towards MAHLI, and the grey covers of the sample delivery systems for CheMin and SAM visible at the front of the rover, between the mast and MAHLI’s position.
All images courtesy of NASA / JPL
