Just over a month ago NASA announced plans to test a nuclear propulsion system on mission to Mars. The news came as a surprise at the time, given it came a year after another nuclear propulsion project involving NASA had joined (along with the US Defense Advanced Research Project Agency (DARPA) had been cancelled.
Called DRACO (Demonstration Rocket for Agile Cislunar Operations), that project was formally initiated in 2021, with the intention of finally evaluating the deep space use of nuclear thermal propulsion (NTP) – that is, the use of a nuclear reactor to heat a propellant mass (usually liquid hydrogen) to generate thrust through the engine nozzles. Targeting a launch date in late 2027, DRACO was always ambitious, and inevitably ran afoul of technical and regulatory challenges starting it on the road to oblivion prior to funding via both DARPA and NASA being halted.

The technological and regulatory problems faced by DRACO primarily concerned two key points. The first being the need for a liquid propellant (requiring substantial propellant mass and the additional mass and complexity of trying to keep the propellant in a liquid state through passive and active means in the full heat of the Sun).
More particularly, DRACO’s nuclear system was to be open cycle, meaning the liquid hydrogen would pass through the reactor system to turn it into the gas needed to propel the vehicle – irradiating it in the process. While people would likely not be too happy about a nuclear reactor spewing radioactive material into the upper atmosphere if it was used whilst in orbit around Earth, the bigger regulatory issue for DRACO was simply how could a system generating radioactive exhaust materials be safely tested on the ground?
Because of this, NASA’s new mission concept – called Space Reactor 1 (SR-1, with the vehicle itself to be called Freedom) instead intends to use nuclear electric propulsion. This is important because it allows the use of a closed cycle nuclear reactor – in this case a closed Brayton cycle fission reactor generating some 50 kW of electrical power. The key point here is that closed cycle reactors can avoid exposing a propellant to radiation, so the exhaust gasses exiting the engine is relatively “clean”. Thus, SR-1 theoretically avoids some of the regulatory issues faced by DRACO.
The “engines” in question for SR-1 are three 12 kW (nominal) Hall-effect thrusters. This in turn is important for a couple of reasons. Firstly, Hall-effect propulsion systems are well understood. Secondly, they utilise a far less volatile propellant than liquid hydrogen – generally Xenon – which a) doesn’t need to be a liquid form, and so b) avoids all the complexities of passive and active refrigeration. Both the use of the thrusters and the Xenon fuel therefore cuts out a lot of the technical complexities SR-1 could face when compared to DRACO. Further, SR-1 plans to use a propulsion module that has been in development for some time: the Power and Propulsion Element (PPE) which was to have been used on NASA’s (now cancelled) Lunar Gateway station. This could again help reduce the technical complexities designing SR-1 might otherwise face and it potentially gains political favour in that it offers a means to make good on some of the money already poured into Gateway.

Nor is SR-1 intended to be a just demonstration of nuclear electric propulsion operating purely in near-Earth / cislunar space as was the case with DRACO; it is to be a genuine deep-space mission, delivering a payload to Mars in 2029, In doing so it will prove the complete viability of nuclear propulsion in space missions. The payload in question is the Skyfall – and no, it has nothing to do with James Bond!
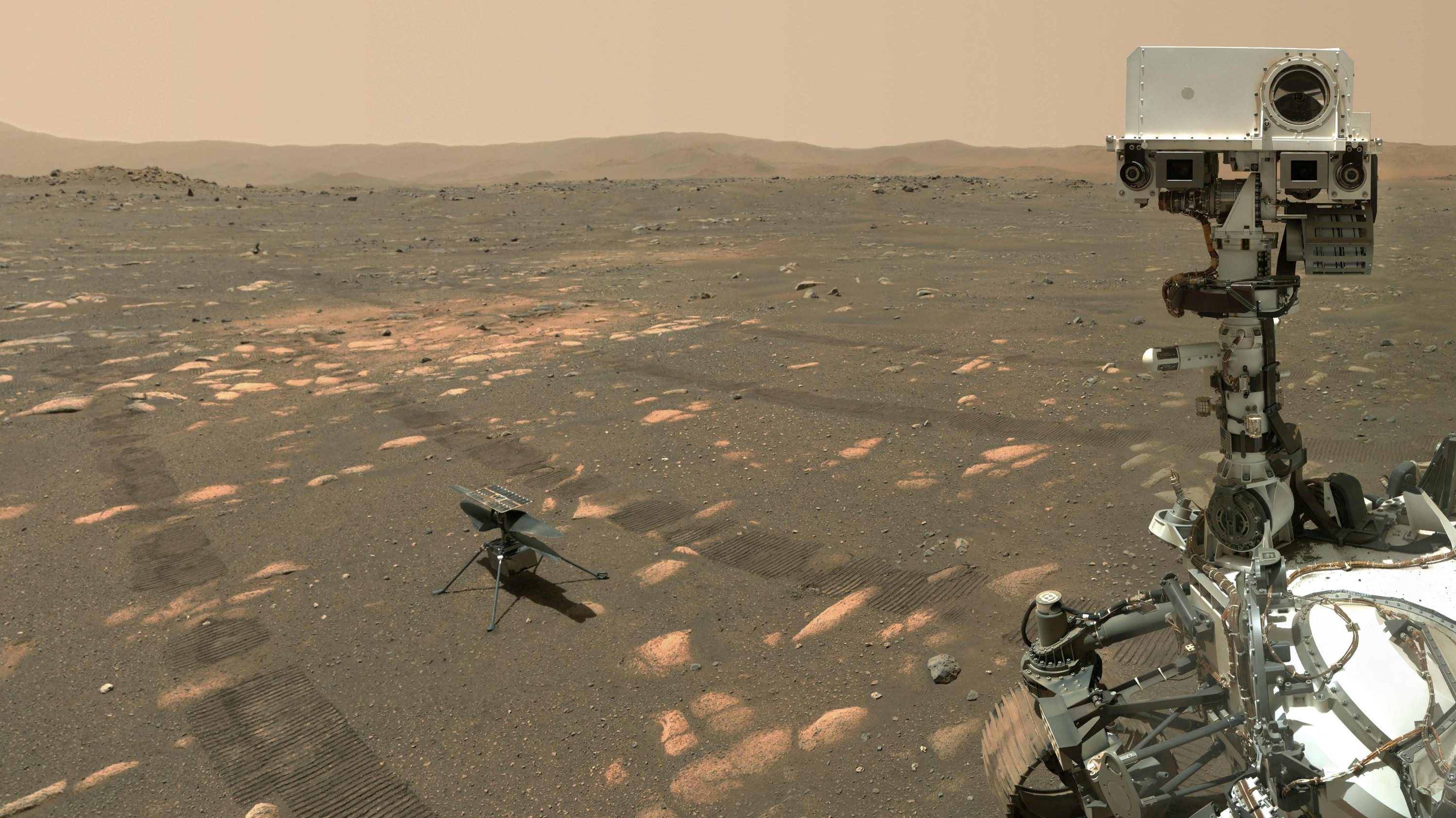
First revealed as a conceptual study in mid-2025 by NASA’s Jet Propulsion Laboratory (JPL) and AeroVironment, Skyfall is designed to build on the experience gained in flying the Ingenuity helicopter on Mars as a part of the Mars 2020 mission (in which it flew 71 times, often in support of the Mars 2020 rover Perseverance. As initially conceived, Skyfall would utilise six updated versions of the Ingenuity design to carry out a range of scouting flights across Mars. For the purposes of the SR-1 mission, the number of helicopters has been reduced to three – but how they will be delivered into the Martian atmosphere remains dramatic.

In short, the mission will use a version of the capsule design used to deliver both Perseverance and the Mars Science Laboratory (MSL) rover Curiosity to Mars in 2021 and 2012 respectively. This will protect the three helicopters both on the journey from Earth to Mars and through the heat and buffeting of entry into the Martian atmosphere. After deploying its main parachutes to slow its decent through the atmosphere and jettisoning its heat shield, the capsule will extend a launch platform underneath itself, allowing the three helicopters to power-up their blades and take flight.
Once airborne, the three craft will operate in parallel, carrying out daily low-level flights of Mars, landing to both recharge their batteries and pass the Martian nights. Each will carry a small science package on board, including high-resolution camera to image the terrain they are overflying (to be used in the planning for future missions to Mars) and ground penetrating radar to reveal what lies beneath that terrain, be it rock, permafrost or deposits of water ice.
However, neither Skyfall nor SR-1 are certain to go ahead as planned. Firstly, there is the extremely tight development / test and construction time frame – just 30 months if NASA really is going to achieve a December 2028 / January 2029 launch for the combined mission.
More particularly for SR-1, there are multiple complications still to be overcome. Perhaps the biggest of these is the reactor feedstock: high-assay low-enriched uranium 235 (aka HALEU, with between 5% and 20% enrichment). While this is ideal for use in compact reactors, it requires a dedicated nuclear fuel cycle infrastructure for its production, and this infrastructure is both limited and already at capacity. Whilst the US government is trying to scale HALEU production, this is not going to happen in the short-term. As such, SR-1 could take considerably longer than 30 months to reach a state in which it might reasonably be launched.
Goodnight, MAVEN
On June 3rd, 2026 NASA confirmed their MAVEN (Mars Atmosphere and Volatile EvolutioN) mission had come to an end after a total of 11 years and the orbiter officially classified as lost. The news came some 6 months after all contact with the orbiter was lost and after a long series of attempts to r-establish communications and to understand what might have happened.
Launched in 2013 and commencing its science mission around Mars in 2014, MAVEN was intended to study the Mars atmosphere in an attempt to understand the composition of the upper reaches of that atmosphere and better understand the mechanism at work in stripping away that atmosphere – particularly that of the solar wind. For over 10 years, MAVEN revealed many of Mars’ secrets and the risks human visiting the planet will face (such as solar storms striking the planet quickly doubling surface radiation levels on a temporary basis).

The first indication that something had gone wrong with MAVEN came on December 4th, 2025, when it failed to resume contact with NASA’s Jet Propulsion Laboratory (JPL) after a routine passage around the far side of Mars. Two days later, JPL received a data fragment from the orbiter, suggesting it was rotating in an unexpected manner and may have deviated from its orbital track. On both December 16th and 20th, 2025, MAVEN passed directly over Gale Crater and the rove Curiosity, but despite the scanning the sky with its high-resolution MastCam along the orbiter’s expected track, there was no sign of MAVEN.
Attempts to regain contact with the orbiter continued at regular intervals throughout early 2026, but by April it was evident that the chances of re-establishing contact were rapidly diminishing. Thus, on By June 3rd, NASA issued a statement terminating the mission while efforts to understand exactly what had gone wrong would continue. Currently, the favoured hypothesis is that MAVEN had an unexpected issue, lost its communications orientation with Earth and was unable to recover. This may have additionally caused the vehicle to drift out of its expected orbit and / or result in its solar arrays being no longer able to generate sufficient power to keep the vehicle’s batteries operating, so it likely ran out of power.
In all, it’s a sad end to a mission that achieved so much, especially given the longevity we’ve come to expect of Mars missions around or on the planet once they have safely entered orbit or landed.
Blue Origin: A Major Malfunction – Update
As per my previous Space Sunday article, on Thursday, May 28th, 2026, a Blue Origin New Glenn booster exploded with tremendous force (estimated to be the equivalent of 1 kiloton of TNT), levelling much of Launch Complex 36 (LC-36) at Canaveral Space Force Base, California, the only facility in the world capable of handling the rocket.
Based on the available images and information available at that time, and as I noted in that article, it seemed that LC-36 would be out of action for at least a year; something that could have major ramifications for Blue Origin and NASA’s Artemis programme. However, June 2nd, 2026, Blue Origin CEO, Dave Limp took to social media with an update on matters which included some surprising news and ended with an even more surprising prediction.

On summary, Limp indicated that:
- The propellant farm alongside the launch pad weathered the explosion reasonably well and will not require significant rebuilding / replacement (although images have revealed a couple of the tanks do have significant denting).
- The damage done to the main vehicle and payload integration building appears to far less severe than reports suggested, and the water tower serving the deluge / sound suppression system is largely undamaged.
- Despite receiving some major damage near its base, the surviving lightning conductor tower can likely be repaired without being demolished – a comment which drew multiple surprised responses given the apparent extent of the damage.
- Rather than building a new transporter-erector (TE – the 1800-tonne vehicle used to move New Glenn from the vehicle and payload integration building to the launch pad and then act as the rocket’s launch tower), the company will now pivot to a new vertical launch platform / transporter, something they were already planning to do prior to the explosion.
Most surprisingly, however, was Limp’s prediction that Blue Origin will resume New Glenn operations by the end of 2026. Given all that has to be done, both in terms of the rebuilding work at LC-36 (to say nothing as to how long investigations into the vehicle loss will take & what might yet be required to clear New Glenn to resume flights, it is fairly hard to see how this can be achieved. As such, a lot of eyes will be watching Blue Origin and LC-36 very closely over the next 6-7 months.















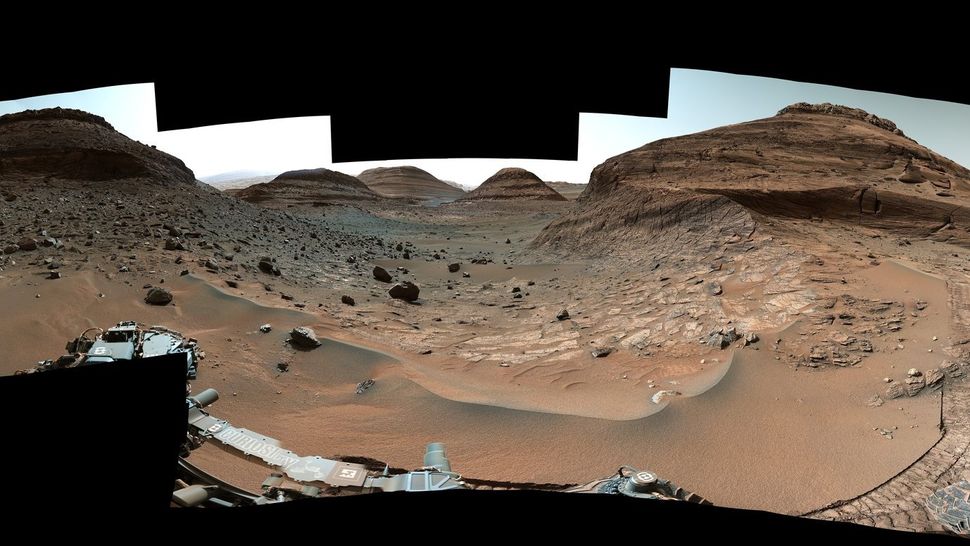
 After a treacherous journey, NASA’s Curiosity Mars rover has reached an area that is thought to have formed billions of years ago when the Red Planet’s water disappeared.
After a treacherous journey, NASA’s Curiosity Mars rover has reached an area that is thought to have formed billions of years ago when the Red Planet’s water disappeared.