Seven years ago on August 6th, 2012 at 05:17 UTC, NASA’s Mars Science Laboratory rover Curiosity arrived in Gale Crater on Mars. I’ve covered the progress of the mission throughout (just follow my MSL / Curiosity tag), and those articles in fact gave birth to this Space Sunday column; but it’s been a while since I’ve last updated on things.
Since its arrival on Mars, Curiosity has driven a total of 21 km (13 mi) from its landing point to the base of the crater’s central mound, Aeolis Mons, and has ascended 368 metres (1,207 ft) up the side of the mound, which NASA informally call “Mount Sharp” to its current location.

Along the way, Curiosity has revealed a lot about Mars – including confirmation that Gale Crater has been host to multiple bodies of water during its early life, and that the conditions were suitable for microbial life to have potentially arisen on the planet.
Nor did the rover have to wait to make the discovery: it did so literally within weeks of its hair-raising arrival when it had barely started on its journey and was exploring an ancient riverbed on the floor of Gale Crater (dubbed “Yellowknife Bay”), when analysis of samples gathered revealed all the essential ingredients which – if mixed with water (that once flowed through the riverbed) – might have given life a kick-start and to have been enough to possibly sustain it during the warmer, wet periods of Mars’ early history.
As well as this, Curiosity has revealed much about the ancient conditions on Mars, has found hematite (which requires the presence of water to form), done much to reveal atmospheric processes at work on the planet, and helped track Martian weather and climate processes.
There have been a few causes for concern along the way. Early on in the mission it was revealed that the rover’s six aluminium wheels had suffered more wear and tear than had been anticipated, prompting some changes to the rover’s route as it approached “Mount Sharp”.
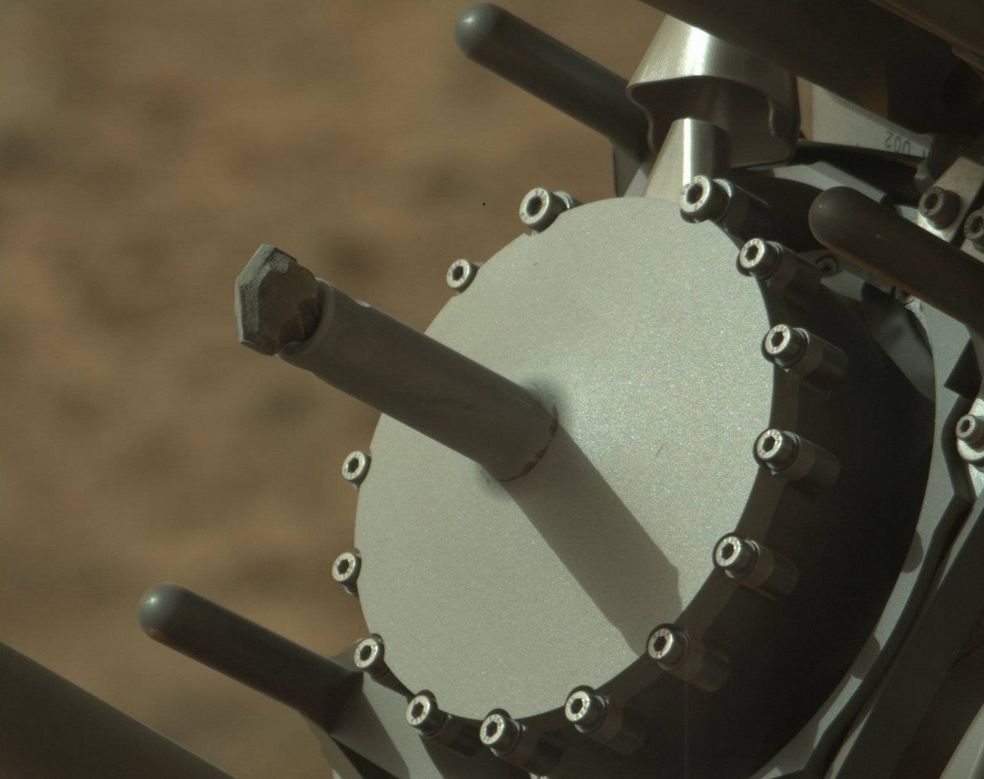
Most particularly, the rover’s drill mechanism has had its share of issues, some of which have required changes to how the drill is operated.
However, none of this has really impacted on the rover’s mission – in fact, Curiosity has recently obtained its 22nd drill sample from Mars, as it examines a region the mission team call the “Clay Unit”, one of several closely packed areas with strong differentiators scientists want to examine. Clay forms in the presence of water, and the area has sufficient enough clay deposits to be detected from orbit, and Curiosity has recovered samples with the highest amounts of clay minerals found to date by the mission.
This area is one of the reasons we came to Gale Crater. We’ve been studying orbiter images of this area for 10 years, and we’re finally able to take a look up close.
– Kristen Bennett, U.S. Geological Survey and co-lead for Curiosity’s clay-unit campaign

Quite why this particular area is so rich in clay deposits is unclear, but the area is home to complex geologic features, such as “Teal Ridge” and “Strathdon,” a rock made of dozens of sediment layers that have hardened into a brittle, wavy heap. Unlike the thin, flat layers associated with lake sediments Curiosity has studied, these wavy layers in these features suggest a more dynamic environment. Wind, flowing water or both could have shaped this area.
Both “Teal Ridge” and “Strathdon” represent changes in the landscape suggestive of the evolution of the ancient lake environment. This is further exemplified by the area above the “Clay Unit”, and towards which Curiosity is slowly making its way. It’s an area rich is sulphate deposits, indicative that it was drying up or becoming more acidic in ancient times whilst the lower slopes were still rich in water.

Cutting down slope through the “Sulphate Unit” is the Gediz Vallis and Ridge, which appears to have been form by water running down “Mount Sharp” at some period after both the Clay Unit and Sulphate Units before spreading into the “Greenheugh Pediment”. This points to the area having seen some considerable changes as a result of climate changes on Mars.
We’re seeing an evolution in the ancient lake environment recorded in these rocks. It wasn’t just a static lake. It’s helping us move from a simplistic view of Mars going from wet to dry. Instead of a linear process, the history of water was more complicated. It’s finally being able to read the paragraphs in a book — a dense book, with pages torn out, but a fascinating tale to piece together.
– Valerie Fox, Division of Geological and Planetary Sciences, Caltech
Curiosity is powered by a radioisotope thermoelectric generator (RTG) that uses a core of plutonium-238. The heat given off by the decay of the isotope is converted into electric voltage by thermocouples and stored within two lithium-ion batteries that directly power the rover’s systems. This ensures the rover obtains constant power during all seasons and through the day and night, with waste heat is also passed through the vehicle’s interior to keep systems and instruments at their operating temperature and without the need for additional electric heating systems.
However, over time, the amount of electrical voltage the RTG can generate decreases. Overall, Curiosity’s RTG is expected to provide sufficient power (100+ Watts) to run all of the rover’s systems for 14 years – so 2019 marks the half-way point. Which is not to say that Curiosity only has seven more years of operations. Rather, it means that in around 7 years power generation is going to fall below the 100 watts mark, and it may become necessary for rationing power between systems on the rover, reducing some of its capacity.
Taridgrades on the Moon?
I’ve previously written about the Israeli attempt to land a vehicle – called Beresheet – on the Moon (see Space Sunday: Mars, the Moon and space hotels and Space Sunday: tourist flights, landers, moons and rovers). Unfortunately, the mission didn’t go as planned, and the lander crashed into the Moon (see Space Sunday: black holes, Falcons and moonshots). However, one of the more curious aspects of the mission is part of the payload.
The mission included the first stage of a privately-funded initiative to transfer living DNA to the Moon – a kind of “Noah’s Ark Mark II”, providing a repository from which plants and animals could be regenerated to repopulate the Earth should a catastrophe akin to a flood of biblical proportions overtake the planet. In particular for this first phases of the project, a 30-million-page archive of human history viewable under microscopes, as well as human DNA were carried by the lander in a DVD-like “Lunar Library” – which also includes tardigrades.

Science fiction fans might recognise this name from the television series Star Trek: Discovery. However, far from being the stuff of sci-fi shows and stories, tardigrades are very real (if a lot, lot smaller than their Star Trek “breathren”) and also exceptionally hardy.
Known colloquially as water bears or moss piglets, tardigrades are a phylum of water-dwelling eight-legged segmented micro-animals that can be found almost anywhere on Earth, from the tops of mountains to the bottoms of the oceans, from the tropical stew of rain forests to the frozen wastes of the polar regions. They can survive extremes of temperature and pressure (both high and low), air deprivation, radiation, dehydration, and starvation and exposure to outer space.
The tardigrades were stored dehydrated tardigrade – which puts them into a state of suspended animation – and “encased in an epoxy of Artificial Amber”. In this state, they could in theory be revived if exposed to heat and moisture. But even without these, the tardigrade could survive for years on the Moon – specimens have been recovered after being in a dehydrated state for decades. Such is the design of the unit in which they are stored, those responsible for the project believe it “highly likely” it survived Beresheet’s impact on the surface of the Moon.
Sadly, it is unlikely we’ll ever get to know if this is the case; the crash point for the Israeli lander puts in it in an area of the Moon’s south polar region far removed from any planned destinations for NASA’s Artemis missions, making recovery very unlikely.
Steam Powered Satellites and Autonomous Exploration
Am August press release from NASA reveals the agency has completed tests of what is effectively the world’s first steam-propelled satellite in Earth’s orbit. Admittedly, it not a particularly big vehicle being tested – it is small enough to compete with a box of tissues – but the test is an important step in examining technologies for future automated space exploration.
The test took place on June 21st, 2019, and was part of a coordinated manoeuvre between two CubeSats operating in low-Earth orbit, carried out as part of NASA’s Optical Communications and Sensor Demonstration (OCSD) mission.

The two tiny vehicles were orbiting the Earth around 9 km (5.8 mi) apart when they automatically established a radio communications cross-link with one another. One then ordered the other to fire its thruster and close the gap between them. Rather than using a traditional hypergolic propellant or inert gas, both of the CubeSats carry small tanks of water which can be heated to produce steam that is ejected through an engine nozzle to generate propulsion.
This demonstration is important on two counts. The first is that it shows the potential for a series of small satellite drones to command one another to carry out assorted operations entirely independently of control from Earth. Such a group of drones could work cooperatively on a mission – say a survey of the asteroid belt or the icy moons of Jupiter. They could operate in unison, commanding one another, or under the autonomous control of a “mother ship” that could have facilities for storing (and returning) samples to Earth.
The second is that, in using water as a means of propulsion, these vehicles could in theory be easily fuelled and refuelled with water – water which might in turn be obtained from the frozen bodies these craft are exploring.
Demonstrations such as this will help advance technologies that will allow for greater and more extended use of small spacecraft in and beyond Earth-orbit. It is exciting to think about the possibilities enabled with respect to deep space, autonomously organizing swarms of small spacecraft.
– Roger Hunter, programme manager,
NASA Small Spacecraft Technology Programme
Perseid Meteor Shower
Every July / August, the Earth passes through a haze of stellar debris left by Comet 109P/Swift-Tuttle. The result is of this passage is the Perseid meteor shower (called this because they appear to originate from the constellation of Perseus), is one of the brightest meteor displays one can see in the northern hemisphere. The shower tends to last around a month, from July 17th (ish) through to August 24th.

This year, the peak period for activity should be August 12th and 13th, when between 60 and 100 meteors an hour might be visible streaking across the night sky. In Europe, the best time to see them is after midnight, while America gets it a little easier and earlier. To check time in your location try timeanddate.com, which should give local observation times.
Unfortunately, the moon will be very close to full on the night of the peak, and this will affect the visibility of the fainter meteors. Of course, you’ll also need to be somewhere that’s dark enough to see the night sky without it being blotted too heavily by surrounding Earthly light pollution.
To help people observe the peak period, there are a number of planned livestreams on the web – including the two below.