NASA’s Perseverance rover celebrated its fifth anniversary on Mars earlier in 2026 as it continues to explore Jezero Crater and its surroundings. Most recently, the rover has been exploring the western rim of the crater and returning some stunning images. Meanwhile, images and data Europe’s Mars Express orbiter – now into its 23rd year studying Mars – has been used to create more high-resolution images and models of surface features on Mars.
Perseverance has been exploring an area NASA has dubbed “Lac des Charmes” (“Lake of Charms”) after a reservoir serving the Champagne and Burgundy regions of France. In the Martian case, the name has been applied to a paleolake, an ancient lake which no longer exists as such – no water, etc., – but which is still identifiable as a former body of water and which lies on the plains beyond the rim of Jezero Crater.
It’s an especially interesting place to study for several reasons, such as it being home to some of the most ancient rock formations the rover is liable to encounter, including megabreccia – fragments of rock blasted out of Isidis Planitia some 50 km from Jezero by one or more meteorite impacts around 3.9 billion years ago.

One of the areas imaged by Perseverance showed an area of megabreccia dubbed “Arbot”, which became the subject of study by the rover from April 2026 onwards. The hope of this study is that it might offer some key questions about Mars: the composition of its interior, whether there was a magma ocean on Mars, and what the initial conditions on the planet might have been and whether they might have been conducive to giving life a kick-start.
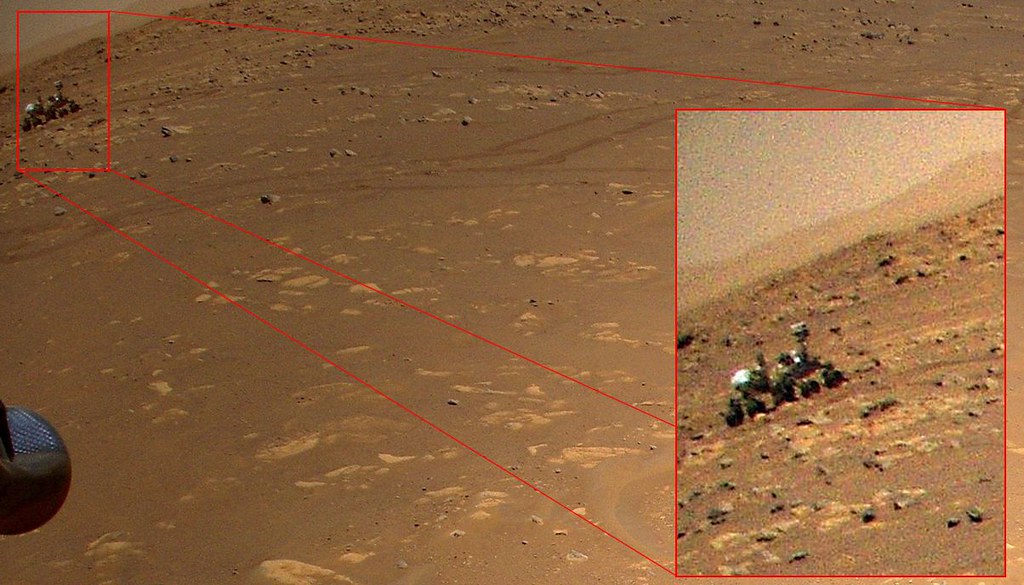
The exploration of “Lac de Charmes” and “Arbot” brings the total distance driven by the rover to date to just over 42 kilometres. The “selfie” taken at “Arathusa” was also not just for prettiness sake: it allowed mission personnel to see the general condition of the rover, particularly its wheels, helping build confidence that Perseverance is more than capable of continuing its mission for a good time yet as it continues to explore the region above Jezero crater.

As NASA was providing updates on Perseverance’s progress, the European Space Agency (ESA) was releasing images recently captured by the High Resolution Stereo Camera (HRSC) aboard the agency’s long-running Mars Express mission as it continues to study Mars.
The images issued by ESA focus on Shalbatana Vallis, a 1,300 kilometre long channel system within the Xanthe Terra region of Mars. It’s not the first time this particular area on Mars has been studied by Mars Express, but these images are among the clearest taken of the valley thus far.

What makes Shalbatana Vallis of particular interest is the way it is believed to have been formed. On a world where even formations thought to have been formed as a result of liquid water are thought to have done so over hundreds of thousands (or millions) of years, Shalbatana Vallis is thought to have been created in a single, major event which came somewhat later in the planet’s history that its “wet” period.
The theory goes thus: some 3.5 billion years ago, when all liquid water on Mar had either evaporated or vanished underground (eventually becoming permafrost). There was a body of subsurface water under a part of Xanthe which was both heated and kept under pressure by geothermal heating. However, something happened in the region. Perhaps it was a massive Marsquake or perhaps the impact of another meteorite.
Whatever the cause, it resulted in the ground covering the trapped water collapsing it into chaotic terrain and setting the water free in a powerful, tidal wave-like surge. This surge rushed down the prevailing slope of the land towards Chryse Planitia (itself believed to have once been home to a massive body of liquid water), cutting into the soft surface rock to create a broad, deep gouge in its wake.

In the intervening 3.5 billion years since Shalbatana Vallis was carved, the lines of the valley have been softened by dust and sand deposits blown into it by successive Martians winds and seasonal dust storms. However, it has remained the subject of study by both ESA (via Mars Express) and NASA because of the evidence relating to its formation and what it might yet reveal about the ancient past of the planet, hence these images.
The existence of features like Shalbatana Vallis not only provide evidence that Mars was once capable of hosting liquid water on its surface, they also point to the fact that the planet’s history was a lot more varied and complex than simply being a case of formation, hot, wet, cool, dry, cold.
A video made up of images of the Xanthe region and Shalbatana Vallis captured by Mars Express and released in 2025
Psyche’s Mars Fly-by
Mars remains a focus for this article as it briefly had a visitor on Friday, May 15th, 2026, when NASA’s Psyche spacecraft passed around the planet.
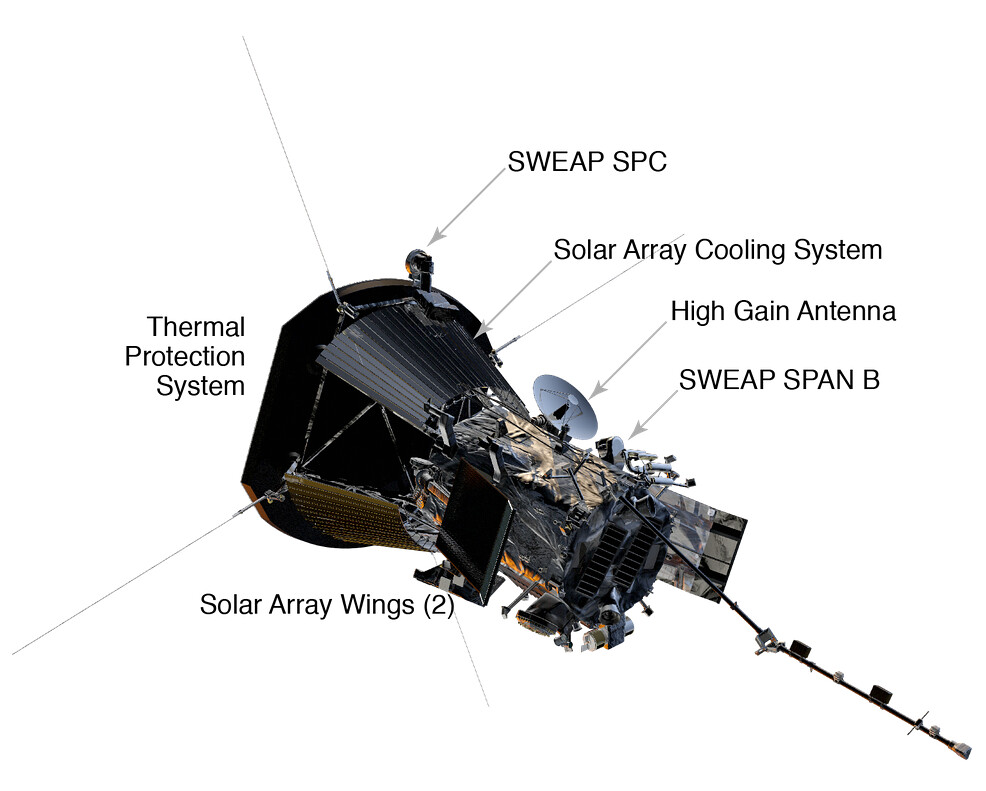
Launched in 2023, the 2.6 tonne spacecraft, propelled by solar-powered Hall-effect thrusters, is en-route to study the asteroid 16 Psyche. This is an M-type asteroid roughly 220 kilometres across orbiting the Sun in the asteroid belt between Mars and Jupiter. It is the heaviest such asteroid such discovered – the “M” classification indicating it has a high metallic content. Astronomers believe it could actually be the exposed silicate-iron core of protoplanet, having has its crust and mantle rippled away very early in the history of the solar system and following a collision with another such body. As such, it is hoped that a study of 16 Psyche could reveal more about planetary formation within the solar system.

Even with its Hall-effect thrusters, and its massive solar arrays used to capture the Sun’s energy and use it to power the thrusters, NASA’s Psyche spacecraft cannot not reach its destination unaided, hence the fly-by of Mars. This allowed the spacecraft to use Mars’ gravity to give itself both a boost in speed – some 19,848 km/h at the time it approached Mars – and to swing itself onto an orbit inclination and overall trajectory to intercept the orbit of 16 Psyche as it travels around the Sun.
The manoeuvre was completed remotely and successfully, the spacecraft coming to within 4,500 kilometres of Mars. Furthermore, the entire approach to Mars and the fly-by were used to further calibrate the spacecraft’s science instruments – which hopefully included takings pictures of Mars while relatively close to the planet using its stereo imagers.
Psyche is now on the second leg of its journey. It is due to enter an initial orbit around 16 Psyche in July 2029, where it will carry out further instrument calibration tests whilst lowering its orbit to some 700 km over the asteroid. It will then commence the first of four science campaigns, each as a different distances from the asteroid. This first campaign, with the spacecraft in a roughly polar orbit will last for 56 days, imaging and mapping 16 Psyche’s surface from a roughly polar orbit.

In the second campaign, the spacecraft will close to just over 300 km above the asteroid for a further 92 days in roughly polar orbit and examine it in more detail. From here it will translate to a near equatorial orbit around the asteroid at just 75km above its surface, allowing it to study those parts of the asteroid it was unable to image clearly due to lighting issues in the earlier campaign.
The spacecraft will then remain in this low orbit for 100 days before translating back to 190km from 16 Psyche, where it will remain for a further 100 days for the final science campaign. After this, and some 26 months after arriving at the asteroid, the plan is to shutdown the spacecraft as its propellants will be close to expended, and ensure it is safely “parked” orbiting the asteroid.
Blue Origin Delivers Lunar Lander Training Mock-up to NASA
Following my previous piece on the Artemis Human Landing System (HLS) vehicles, NASA and Blue Origin announced the latter has now delivered a full-scale training / study mock-up of the crew module for their Blue Moon Mark 2 (MK2) HLS vehicle.

The unit has been delivered to Johnson’s Space Vehicle Mock-up Facility (SVMF) and lacks the both the engine section that will sit below the crew module and the cryogenic fuel tanks that will sit above on the actual HLS vehicle, as these are not required in a mock-up.
At SVMF, the Blue Moon unit joins mock-ups of space station elements, SpaceX Crew Dragon vehicles and, most relevantly, the Orion spacecraft. It will be used by NASA and Blue Origin to conduct a series of human-in-the-loop tests (testing the design and its systems with human interaction), including mission scenarios, mission control communications, spacesuit checkouts, and preparations for simulated moonwalks. Feedback from the these and simulations will then go back into overall engineering and production decisions affecting the construction of the actual lander vehicles.

In all of this, the new unit builds on work initiated using an earlier mock-up located at Blue Origin’s own facilities, together with practical testing of a prototype of the vehicle’s airlock in NASA’s the Neutral Buoyancy Lab in 2025.
Artemis 3: More Details Released
On Wednesday May 13th, 2026, NASA provided further information on the revised Artemis 3 mission currently scheduled for late 2027.
Originally established as the first crewed mission to attempt a return to the lunar surface under the Artemis banner, the mission was re-defined by NASA Administrator Jared Isaacman in February 2026 to be a Earth-orbiting crewed test of one or both of the planned HLS vehicles. Prior to this decision being taken, the only in-space testing of either of the planned HLS vehicles required by NASA would have been uncrewed – hardly ideal.
In the Apollo era, for example, there was crewed testing of the Apollo lunar lander in Earth orbit during the Apollo 9 mission. This allowed astronauts gain hands-on experience in using the vehicle (e.g. piloted control and manoeuvring, ensuring the internal spaces are fit for purpose in zero gravity, etc.) within the environment in which it was designed to operate will before it was flown to the Moon as a part of an actual mission.

However, other than announcing the use of Artemis 3 for physical testing prior to Artemis 4 and the first planned landing, there has been little further information on how Artemis 3 will work. Some of this detail has now been given, including:
- The mission duration is to be longer than that of Artemis 2; as well as being used to test one or both of the HLS systems, it will include further tests on Orion’s own systems and capabilities.
- The Space Launch System (SLS) booster to be used on the mission will not include the upper Interim Cryogenic Propulsion Stage (ICPS), as this is not required in order for the crew-carrying Orion vehicle to reach Earth orbit, where the HLS vehicle(s) are to be tested (it can do this using its European Service Module). Instead, a dummy “spacer” will replace the ICPS.
- NASA plan to use the mission to also launch additional cubesat missions (as they did with Artemis 2) and is seeking proposal for such missions.
Artemis 3 is set to be one of the most complex mission NASA has yet undertaken, involving potentially involving the co-ordinated launch of three separate vehicles from three different providers, the on-orbit rendezvous and docking between Orion and up to two different orbiting targets, and the requirement for Orion to move between different orbits in order to do so. As such, there is more to come in terms of the mission and its parameters and goals in the coming months.