NASA’s Curiosity rover Has completed a significant software upgrade, marking the third time the rover’s flight software has been updated since arriving on Mars in August 2012. The update was originally scheduled to take place over the course of a week in early November. However, during the course of the software upload, Curiosity unexpectedly committed a (non-threatening) software reboot (technically referred to as a “warm reset”), which eventually saw the software reverted to its original state.
NASA’s Curiosity rover Has completed a significant software upgrade, marking the third time the rover’s flight software has been updated since arriving on Mars in August 2012. The update was originally scheduled to take place over the course of a week in early November. However, during the course of the software upload, Curiosity unexpectedly committed a (non-threatening) software reboot (technically referred to as a “warm reset”), which eventually saw the software reverted to its original state.
Analysis of data received as a result of the reset revealed a catalogue file for the existing onboard software was triggered as a result of the newly uploaded flight software. As a result of this analysis the rover team were able to determine the steps required to ensure the correct software execution took place before allowing the rover to resume normal operations using the existing flight software (version 10).
A second attempt was then made up upload and execute the new flight software (version 11) over the course of a week earlier in December, which saw the rover transition to the new software without incident.
The new software further expands the rover’s ability to deploy and use its robot arm and the turret-mounted science instruments and tools while the vehicle is operating on sloping surfaces – a vital requirement once Curiosity starts exploring the lower slopes of “Mount Sharp”. The software also further enhances the rover’s ability to safely store and retrieve navigational data, increasing its autonomous driving abilities even further.
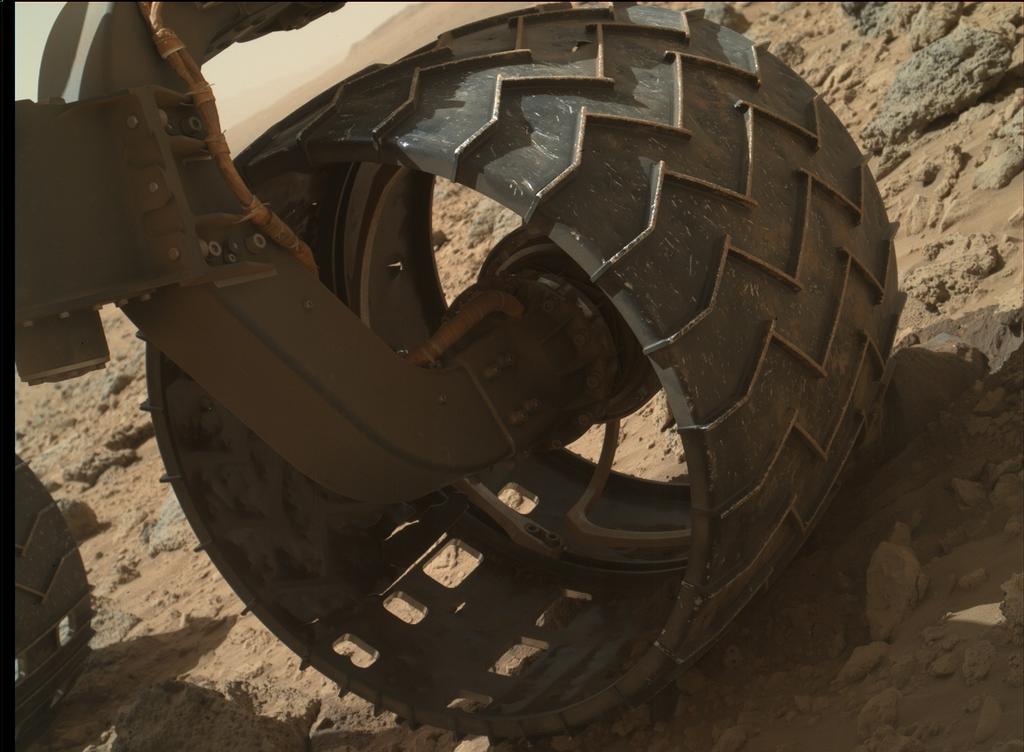
Over the last several weeks, Curiosity has been driving over exceptionally rugged terrain while en route to a point where it can traverse a series of sand dunes lying between it and “Mount Sharp” and start its explorations there. As a result of this, concerns have been raised that the rover’s six aluminium wheels are perhaps suffering an accelerated wear.
While the wheels can sustain a significant amount of damage without impairing the rover’s driving abilities, the mission team have decided to locate and drive the rover to a relative smooth area of Gale Crater where the robot are can be deployed to use the Mars Hand Lens Imager (MAHLI) to inspect each wheel for holes and other signs of damage.
“We want to take a full inventory of the condition of the wheels,” said Jim Erickson, project manager for the NASA Mars Science Laboratory Project. “Dents and holes were anticipated, but the amount of wear appears to have accelerated in the past month or so. We would like to understand the impact that this terrain type has on the wheels, to help with planning future drives.”
Depending upon the outcome of these checks, it may be that mission planners will opt to review the rover’s course to “Mount Sharp” and destinations along the way in order to try to reduce the amount of time spent traversing such rough terrain.
Almost Four Miles
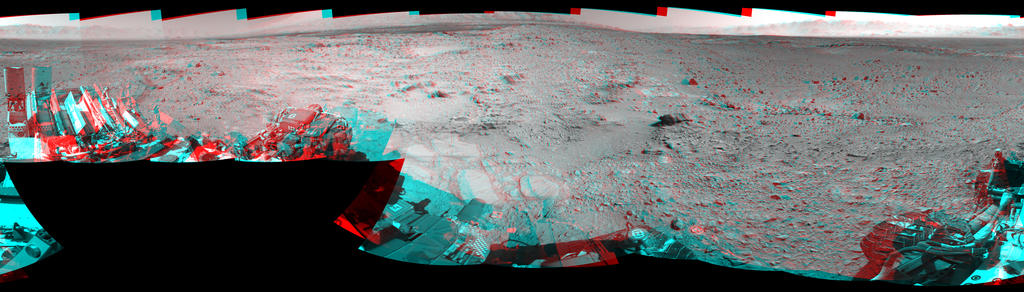
On December 8th, 2013 – Sol 477 of the mission, Curiosity clocked-up a distance of 4.61 kilometres (3.86 miles), and the rover paused to take a series of images of its location using the mast-mounted monochrome Navcams, which were then put together to form a cylindrical mosaic (below).

In the image, north is at either end of the mosaic, and south in the centre . The black squares are areas outside of the visual range of individual images used to create the mosaic. The images were individually captured by the left and right Navcam systems, and the two sets of images combined to offer a stereo view of Curiosity’s surroundings which can be seen using red-blue glasses with the red lens on the left (below).
In my last MSL report, I referenced the research into the age of the rocks in Gale Crater and the effects of weathering and erosion. Understanding of both helps scientists learn about the processes at work close to the surface of Mars, infer whether features were predominantly formed by action of wind or water (or a combination of both, and where one took over from the other), and understand relative levels (in ages) different rock has been exposed to cosmic radiation. Further images used in that research have since been released.
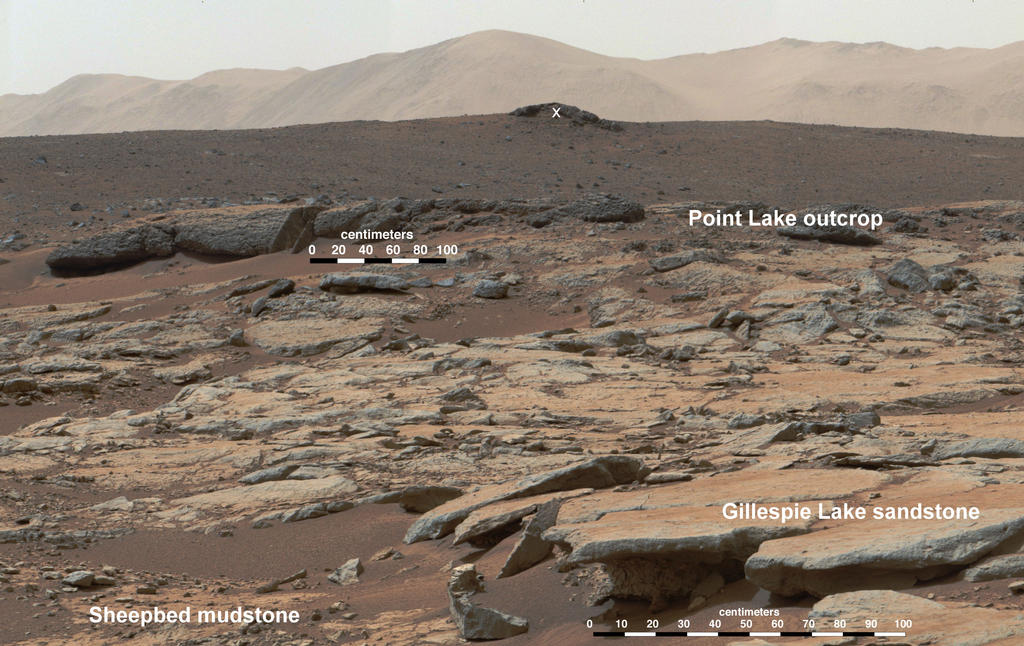
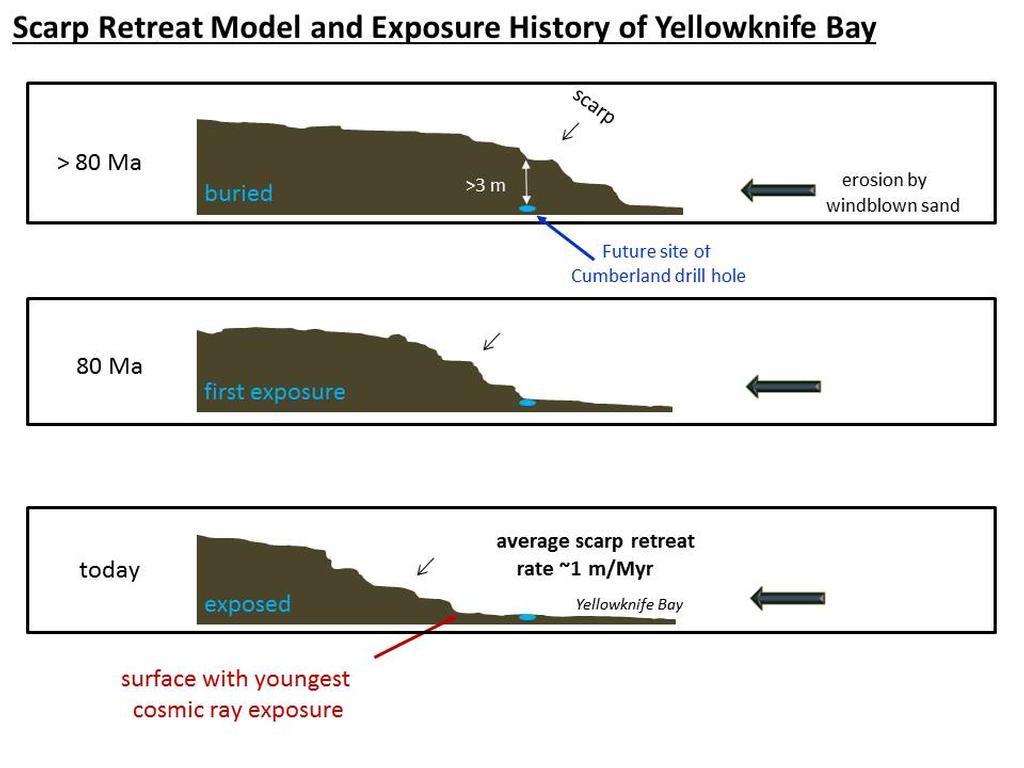
The image above show a mosaic put together using pictures captured by Curiosity’s Mastcam system on Sol 188 (February 14th, 2013), while the rover was operating in the “Yellowknife Bay” area. Looking west-northwest, the scene shows the various levels of rock which have been exposed in a process known as wind-driven scarp retreat, which can be described as the sideways erosion of a vertical face.
In the lower left corner is the “Sheepbed” mudstone deposit, which contains the “Cumberland” rock formation from which Curiosity gathered drilling samples. Gas analysis of the samples (some of which were saved by the rover and further analysed during the long road trip towards “Mount Sharp”) suggest the rock has only been exposed for about 80 million years – which is a lot more recent an exposure than previous estimates of the overall exposure of the Martian surface to the rigours of cosmic and solar radiation had suggested.
The evidence for wind erosion being the primary cause of exposure is strongly suggested to the right of the image, where erosion of the mudstone is clearly undercutting the “Gillespie Lake” sandstone layers. These layers were about 15.4 metres (50 feet) from the rover. The mid-image “Point Lake” layers are some 36 metres (118 feet) from the rover, while the rocky outcrop marked by the white “X” is around 240 metres (780 feet) away, and on an elevation about 13 metres (43 feet) higher than “Sheepbed” and “Gillespie”.
A key aspect of understanding how and when such exposure of previously hidden rock layers occurred is that it gives the rover team better insight for selecting future targets for drilling to investigate whether organic chemicals have been preserved in rocks.
Related Links
- MSL reports in this blog
All images courtesy NASA / JPL
.