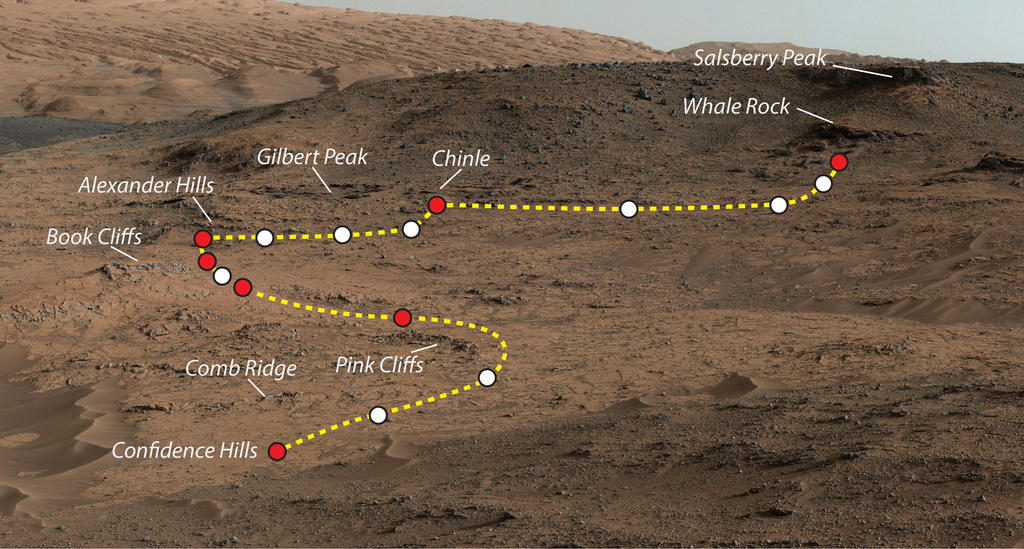
Things are a tad quiet on the Mars news front, with Curiosity still on walkabout in the “Pahrump Hills”. So here’s a little round-up of some upcoming NASA news.
Orion Countdown
Thursday, December 4th should see the first launch of NASA’s next generation crewed space vehicle, the Orion Multi-purpose Crew Vehicle (MPCV). Superficially harking back to the days of the Apollo Moon landings, Orion is a two-stage vehicle comprising a capsule-like Command Module, capable of seating up to 6 astronauts, and a smaller Service Module, which supplies propulsion, power and life support. However, Orion is a lot more sophisticated than the Apollo craft, the capsule unit being a lot larger in both size and volume, and having the capabilities of both being reused and of making either a splashdown or landing on dry land on its return to Earth.

As I’ve previously reported, this first launch of Orion will be uncrewed, serving to test the vehicle’s launch, flight and recovery capabilities in a mission lasting some 4.5 hours which will take the craft further from Earth than has been the case for any crewed vehicle since the last of the Apollo lunar missions in the 1970s. In doing so, the vehicle will be tested through the Van Allen radiation belts surrounding the Earth, and the capsule will be directed to re-enter the Earth’s atmosphere at around 80% of the velocity it would achieve on a return from a cislunar mission (that is, roughly 4,000 kp/h (2,500 mph) faster than the space shuttle ever returned to Earth).
Orion is designed to sit at the hub of NASA’s plans for the initial human exploration of the solar system. Its likely future uses include ferrying crews to the Moon and back and, in the 2030s, forming the command vehicle in a human mission to Mars.

For lunar missions, Orion will, again like Apollo, be mated to a lunar lander, which it will ferry to the Moon, before the crew transfer to the lander and descend to the Moon’s surface. Again, the differences are that with the Orion mission, the MPCV can remain “parked” in lunar orbit unattended while the crew use their lander and equipment and facilities landed remotely on the Moon to spend weeks or Moons there, rather than days.
For missions to Mars, Orion will be part of a much larger vehicle, the details of which are still to be decided, but which is likely to be launched by Orion’s dedicated rocket, the Space Launch System (SLS), in a number of parts which will rendezvous in orbit prior to the crew flying to it via Orion and embarking. An Orion capsule would then serve as the Crew Return Vehicle, delivering the crew back to Earth at the end of there 3-year mission.

Orion’s first mission will use a fully-functional capsule mated to a “dummy” service module (the actually service module is to be built by the European Space Agency, using the technologies developed in the hugely successful but grossly under-sung Automated Transfer Vehicle design, which has been quietly resupplying the International Space Station for the last five years (and refuelling it) with up to 7 tonnes of supplies per flight – more than double anything managed by the Russian Progress supply vehicles, the SpaceX Dragon and Orbital Science’s Cygnus vehicle.
In 2017, Orion will make an unmanned flight around the Moon (shown in the video below), this time using an actual Service Module and the SLS launcher, in what is being called the Exploration Mission 1. Then, in around 2021, Orion will fly its first crew in a mission to rendezvous and land on an asteroid.
New Horizons to Wake-up
Assuming all goes according to plan, two days after the Orion test flight, over 26 AU from Earth (AU being an astronomical unit – the average distance between the Earth and the Sun – that’s 149,597,871 kilometres or 92,955,807 miles), a tiny space craft will “wake up” from the third of three hibernation periods which have collectively lasted 31 months, allowing it to ready itself for its primary mission objective: a 6-month “flyby” of the dwarf planet Pluto, which should yield masses of information about that world and its major companion Charon.
after 10 years in space – the last 31 months of which have been largely in hibernation (other than brief periods of science data gathering), and a voyage through our solar system which has, like that of ESA’ comet-chasing Rosetta mission – provided many other opportunities for science discovery, New Horizons will commence its primary mission in January 2015, as it starts into its approach and fly-past of Pluto, Charon and their family of tiny “moons”, Kerberos, Styx, Nix and Hydra.

No-one actually knows what New horizons will reveal; such is the distance between Earth and Pluto, we know very little about it in real terms, so the mission is very much like those of the pioneering days of space exploration, when we sent vehicle to Venus and Mars, not actually knowing for sure what they’d find.
Despite travelling at 1,600,000 kilometres a day, it will take New Horizons until July 2015 to reach its point of closest approach to Pluto – just 10,000 kilometres from the planet’s surface. The images and data it should return to Earth promise to be astounding.
And after July 2015? New Horizons will be heading out into deep space beyond our solar system, becoming only the third vehicle built by humans to do so, the other two being Voyagers 1 and 2. Providing it is still active, New Horizon should reach the heliosphere, the “boundary layer” marking the divide between the solar system and interstellar space, in 2038. Between 2015 and then, the craft will be used to observe other Kuiper belt objects of interest and send back data on the space through which it is travelling.
Wanderers
Whether humanity ever joins Voyager and New Horizons in moving beyond our own solar system is a subject of popular debate. Given the distances involved between the stars, the only practical way of reaching solar systems beyond our own in through exotic methods – faster-than-light travel, wormholes, and the like – if we are to avoid centuries and generations travelling the interstellar void; and there is still no guarantee we’ll harness either.
But even should we remain locked inside our own solar system for centuries to come, we still have a vast range of environments to explore and possibly tame. This is something Erik Wernquist reminds us about in a stunning video he’s produced, using selected commentary spoken by the great Carl Sagan during his ground-breaking television series, Cosmos. This really is one to watch.
My thanks to Nalates Urriah for pointing me to Erik’s video.