
NASA’s Mars 2020 Perseverance rover has spent a further week prepping itself to commence full-time operations on Mars, while also clocking up a distance of 90+ metres while further exercising its driving skills. The mission has also started honouring the Navajo people and their language.
Prior to the mission launching, the science team divided the anding site in Jezeo Crater into a grid with each cell covering an area of 1.5 square kilometres and after a US national park exhibiting similar geology. The plan was to compile a list of names inspired by each cell’s national park that could be used to name features observed by Perseverance. However, as the rover landed in the cell named for Arizona’s Canyon de Chelly National Monument (Tséyi’ in Navajo), in the heart of the Navajo Nation, the mission team reached out to the Navajo Nation through team member Aaron Yazzie, himself a Navajo (or Diné), to seek their permission and collaboration in naming new features on Mars.
Navajo Nation President Jonathan Nez, Vice President Myron Lizer enthusiastically agreed to the idea and worked with advisers to make an initial list of 50 words in the Navajo language that could be used by the rover’s team in dubbing surface features imaged by the rover.
The partnership that [we have] built with NASA will help to revitalize our Navajo language. We hope that having our language used in the Perseverance mission will inspire more of our young Navajo people to understand the importance and the significance of learning our language. Our words were used to help win World War II, and now we are helping to navigate and learn more about the planet Mars.
Navajo Nation President Jonathan Nez

These names have already started to be used, and more are being added to the list. There is, however a complication: the accent marks used in the English alphabet to convey the unique intonation of the Navajo language cannot be read by the computer languages Perseverance uses. So instead, the science team is working with the Navajo to produce unaccented phonetic representations of the names which the rover can interpret.
The first of the Navajo names to be used is “Máaz” (the Navajo word for Mars – or “Maaz” to the rover). It has been applied to the first target for study by the rover, a large, flat rock the rover is due the commence studying soon. A second rock, dubbed “Yeehgo” (Yéigo in Navajo) has been used as a test subject for the rover’s SuperCam.

Developed jointly by the Los Alamos National Laboratory (LANL) in New Mexico and a consortium of French research laboratories under the auspices of French space agency CNES, SuperCam is an instrument suite that can provide imaging, chemical composition analysis, and mineralogy in rocks and regolith from a distance. It comprises two lasers that can “zap” rocks and other features multiple times per second while using it imaging system and four spectrometers to analyse the vapour and dust given off by the laser strikes to determine the composition of the material struck and potentially identify bio-signatures and assess the past habitability of the rock.
“Yeehgo” was used as a means of testing the resolution of the Remote Micro-Imager (RMI) on the SuperCam system, with the rover’s high-resolution Mastcam and Navcam systems (both of which are mounted on the rover’s mast just below the SuperCam) also capturing images for context. The rock was also a target for the laser systems, which the on-board microphones picked up as they fired, the lasers sounding like a fast swinging Newton’s Cradle (sorry, no “pew-pew!” from Mars).
Since departing “Octavia E. Butler Landing” the rover has been scouting locations of interest, in particular looking for an area when it might safely drop off the Ingenuity drone helicopter. The latter is intended to complete its test flights in the first 30-60 days of the mission in order to free-up the rover so it can drive much further afield and get on with its primary science mission in earnest.
Along the way, Perseverance paused to take in objects such as the rocks mentioned above, and to perform checks of its underside using the imaging systems on its robot arm, checking on the ejection of the “belly pan” covering the underside caching system that will deposit samples of rock and material for collection by a future sample-return mission.
I’ll have more on the Mars 2020 mission over the coming weeks.

Tianwen-1’s First High-Resolution Images of Mars Released
China’s Tianwen-1 mission has now been in orbit around Mars for a month, and the China National Space Administration (CNSA) has released new high-resolution images taken by the vehicle. CNSA offered scant details about the new photographs, although the colour image shows the Red Planet’s north pole and the two black and white images were taken from an altitude of about 350 km.
The vehicle is currently engaged in mapping the southern reaches of Utopia Planitia, seeking a suitable landing point for the mission’s lander/rover combination, which is due to touch-down in May or June, and it was this region that featured in the black and white images of the planet’s surface.
Once on Mars, the rover will spend about three months carrying out a range of activities using a on-board suite of six instruments, working in concert with the orbiter to gain more information on the Martian atmosphere, weather and climate, as well is looking underground via radar sounding.

SpaceX: Starship and Super Heavy
On Monday, March 8th, SpaceX moved starship prototype SN11 to a launch stand at Boca Chica, Texas, in readiness for its turn at making a flight to 10km altitude and (hopefully) a safe landing.
The move came less than a week after the loss of prototype SN10, which exploded on the pad some 7-8 minutes after making an almost successful landing after its flight, and again points to an increase in cadence for text-flights as more vehicles become available.

With its three Raptor engines installed prior to delivery to the launch stand, the vehicle had been expected to go through a rapid series of “cryo-proofing” tests during the week leading up to a static fire test of the three motors at the end of the week. While the cryo-proofing tests were duly completed, the static fire test was cancelled, and a target date of Monday, March 15th set instead. The FAA have also issued a block on flying around or over the Boca Chica site on Tuesday, March 16th, suggesting that is the target date for the first launch attempt.
In the meantime, work has been continuing clearing the landing site of the wreckage of SN10. The loss of this vehicle has been put down to a number of causes. It appears Following the flip-up manoeuvre, one of the two remaining Raptor engines that should have kept firing until the vehicle had slowed sufficiently for one engine to take the load actually cut out prematurely, while the remaining engine suffered helium ingestion (helium being used to maintain fuel flow from the header tanks as they are emptied), suggesting one of the tanks may have been low on fuel. As a result, the engine produced less thrust than commanded, and the vehicle landed heavily – at around 10 metres/second.

Even had all 6 landing legs properly deployed, they would have been crushed under the force of the landing. As it was, the hard landing left the vehicle canted, and potentially with a fractured fuel line or damaged valve that allowed the remaining methane to escape, leading to the eventual explosion.
For SN11’s landing, it is likely that both of the post-flip-up engines will remain operational throughout the final landing in order to provide the required thrust. It also appears that SpaceX will introduce a new landing leg system with SN17 – the original skirt and legs for that vehicle apparently having been removed. This vehicle will be the third in the next generation of starship proof-of-concept vehicles, which currently spans vehicles SN15 (which will be the next to fly after SN11) through to SN20.

As well as further starship prototypes being constructed, the first of the Super Heavy booster prototype is nearing completion. BN1 (“Booster Number 1”) will represent the first completed Super Heavy, standing some 72 metres in height, and used for initially low-altitude flight testing. Also designed to be fully reusable, the initial Super Heavy vehicles being equipped with landing legs. However, Musk eventually hopes the boosters will return directly to their launchpads, to be caught by an elaborate mechanism.
This might sound crazy – and would require a high degree of confidence in the entire system, given that any deviation in descent / final approach could result in the loss of both vehicle and launch tower; but Musk ultimately sees it as a means to reduce the overall complexity and mass of Super Heavy by doing away with the landing legs and their associated hardware, whilst allowing for a faster vehicle turnaround, with all required maintenance would be done at the pad. The video below conceptualises how such a system – using two towers at the launch pad – might work.
In Brief
Hubble Space Telescope
The Hubble Space Telescope (HST) entered “safe mode” unexpectedly on Sunday, March 7th as a result of a software glitch. The issue caused the 30-year-old orbital telescope to suspend science operations, which were in part recovered on Thursday, March 12th.
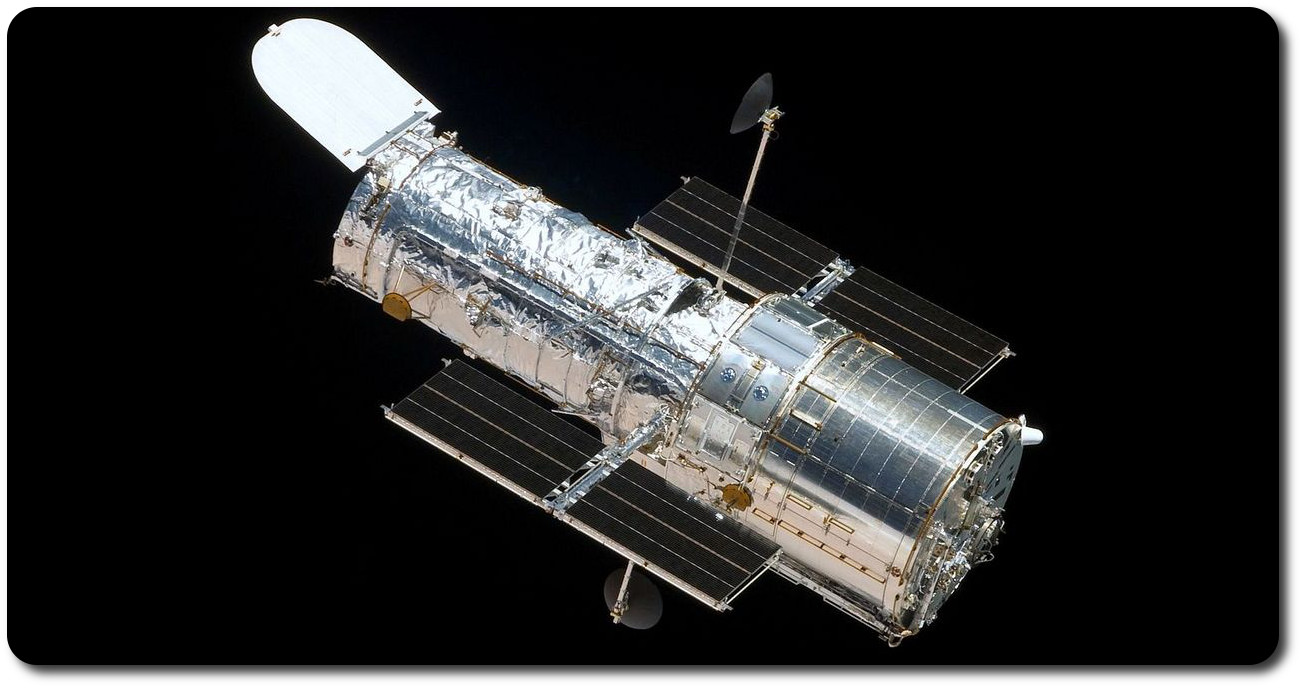
The software glitch stemmed from a recent modification to the telescope’s code designed to address the most recent gyroscope woes the observatory has experienced. While diagnosing the problem, the issue, mission engineers also noted the large door at one end of the telescope, intended to protect its sensitive optics should it accidentally turn towards the Sun, and which should close whenever the telescope enters “safe mode”, had remained open.
This problem, together with the gyroscope code error, was subsequently fixed via a code update for the latter, and switching the door over to use a back-up motor system for closing / opening. This allowed the science systems to be re-started, only for a further problem to emerge with the Wide Field Camera 3, or WFC3, the main imaging camera on HST, which has prevented it returning to full operational status. This issue is still being investigated, and at the time of writing, NASA had yet to provide a further details on the issue.
SLS Update
NASA has announced its Space Launch System (SLS) will undergo its second “Hot Fire” test of its of its four core stage RS-25 motors on Thursday, March 18th.

As a result the decision was made to re-run the test – a crucial part of certifying the SLS core stage for flight. If successful, the March 18th run will clear the way for this first core stage will be shipped to Kennedy Space Centre and used in the first SLS launch, which will see an uncrewed Orion crew vehicle engage on an extended trip around the Moon and back.
NASA Looks to New Origin for Lunar Gravity Simulation Flights
Blue Origin’s New Shepard sub-orbital vehicle is it be used by NASA to simulate lunar gravity for up to two minutes a flight to allow the agency to test tools and techniques that could be used on the Moon.
While NASA can perform extensive testing in microgravity on the International Space Station, and for shorter periods on suborbital vehicles and aircraft flying parabolic trajectories, it is far more difficult to perform tests in a reduced gravity settings such as the 1/6 Earth normal found on the Moon. While the latter can be simulated using an aircraft using a modified parabolic arcs, the effect only lasts for around 30 seconds a time.

Using a modified version of New Shepard, NASA and blue Origin plan to use reaction control systems on the vehicle’s capsule to spin it at a rate of 11 rpm. This will allow it to effectively become a centrifuge that can simulate lunar gravity. The first such flight will likely take place around 2022.
