
NASA’s attempts to free the heat-sensing “mole”, deployed onto the surface of Mars by the InSight lander mission at the end of 2018 have met with some success.
As I reported at the start of October, the “mole”, a special probe that forms a key part of the Heat Flow and Physical Properties Package (HP³), is designed to propel itself up to 5 metres (16 ft) beneath the surface of Mars in order to record the amount of heat escaping from the planet’s interior, helping scientists determine more about the planet. However, Since February of 2019, it has been stuck, having travelled just 30 cm and leaving it partially sticking out of the ground. Numerous attempts to get it moving again have been tried, none of which, up until this most recent attempt, had managed to get the “mole” moving again.
The problem was believed to be down to the self-propelled probe being unable to generate sufficient friction against whatever material it had burrowed into in more to gain downward traction. At that time, I noted that the mission team where hoping to use the lander’s robot arm to apply direct pressure against the exposed portion of the probe in the hope of pushing it against the side of the hole it has so far created, giving it sufficient traction to resume burrowing.
On October 14th, 2019, the German team responsible for the “mole” confirmed the attempt had worked: the probe had resumed progress during the initial test, burrowing a further 3 cm (just over an inch). That may not sound much, and it certainly doesn’t mean the “mole” is in the clear; however, it does tend remove the other lurking fear: that the probe had in fact hit a solid mass such as a boulder or rock that was impeding its downward progress.

The mole still has a way to go, but we’re all thrilled to see it digging again. When we first encountered this problem, it was crushing. But I thought, ‘Maybe there’s a chance; let’s keep pressing on.’ And right now, I’m feeling giddy.
– Troy Hudson, JPL engineer-scientist leading the US side of
efforts to get the “mole” moving again
This doesn’t mean the “mole” is free and clear however; the extent of the loose material it appears to have burrowed into is unknown, and as the data cable connected to it cannot be used to simply haul it back out of the initial hole, the decision has been made to keep the scoop of InSight’s robot arm pressed against the exposed portion of the probe until such time as it can no longer provide support. The hope is that by the time this has happened, the mole will have moved beyond the looser material that seems to be hampering downward movement. However, in case if it has not, the team are now looking at other options to try to assist the probe – such as filling-in the hole behind it in the hope that sufficient material falls around it to provide it with the traction it needs.
Throughout its time on Mars, InSight has been under observation by NASA’s Mars Reconnaissance Orbiter, which routinely passes over the Elysium Planitia region where InSight landed. As such, it has been able to image the lander on several occasions, but on September 23rd, 2019, MRO directly overflew InSight’s landing site at an altitude of 272 km (169 mi), and the orbiter’s HiRISE imaging system captured what is regarded as the best image yet of InSight (blow).
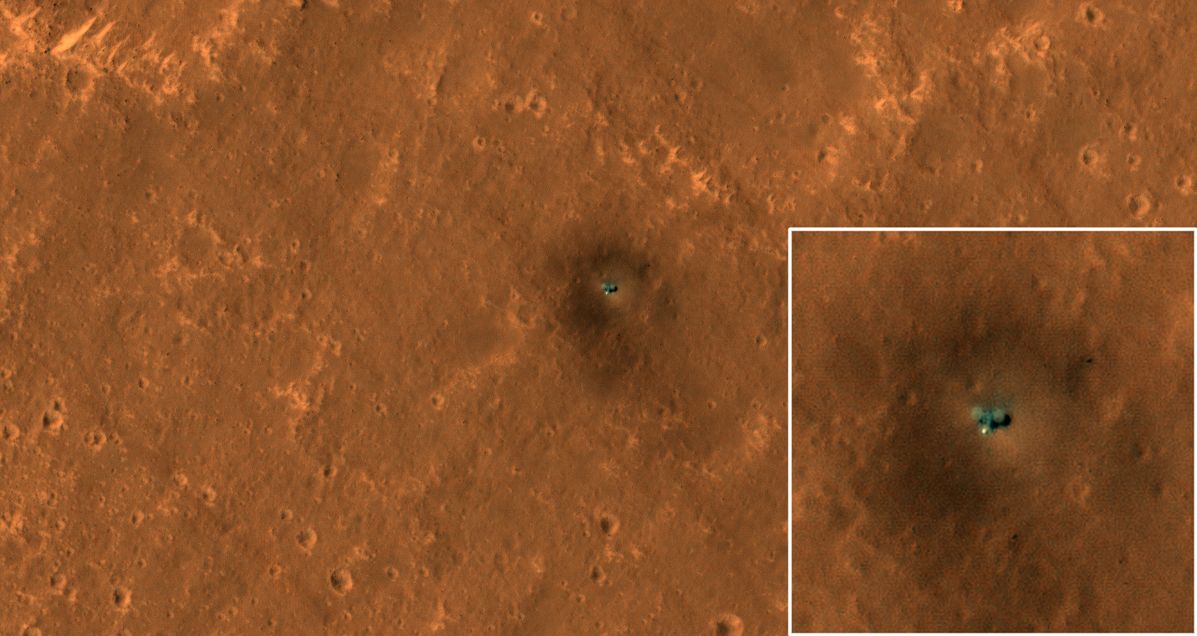
The main image above shows the lander on the surface of Mars surrounded by the blast circle left by its landing motors. The inset image shows the lander in greater detail, revealing its two circular solar panels, each just over 2 m (7 ft) across (in green), with the body of the lander between them (brighter green). The bright dot just below the lander is the protective dome covering the seismometer deployed to the surface of Mars along with the HP³ mentioned above. Also visible in the main image is a series of diagonal streaks on the Martian surface. These are the tracks left by dust devils that have passing through the area.
As well as issuing the image of InSight on October 16th, NASA also released an animated GIF showing the Mars Science Laboratory’s progress up the slopes of “Mount Sharp” (Aeolis Mons). The GIF switches between two shots of “Mount Sharp” taken at the same overhead angle and roughly two months apart. Between them, they show Curiosity’s progress across 337 m (1,106 ft) of what was dubbed the “clay bearing unit”. The first image, which has Curiosity circled near the top, was captured on May 31st, 2019 as the rover was sitting within “Woodland Bay”. The second image shows Curiosity on July 20th, 2019, as it sat on a part of the unit called “Sandside Harbour” further up the slopes of “Mount Sharp”.

UK and Japan Plan to Send Rovers to the Moon
Both the United Kingdom and Japan are planning to become part of a select community (thus far!) of countries that have operated rover vehicles on the surface of the Moon.
To date, only three nations have operated rover vehicles on the lunar surface: Russia, with its Lunokhod 1 and Lunokhod 2 rovers, China with its Yutu rovers (all of which were automated vehicles) and America with the Apollo lunar roving vehicle famously driven by the astronauts of Apollo 15 through 17. The Japanese and British rovers will be very small, as carried to the Moon as part of a robotic lander called Peregrine being developed by US commercial organisation, Astrobotic, one of the former contenders for the Google Lunar X Prize.
The Japanese rover, called Yaoki, is a single axle vehicle designed by Dymon Co., Ltd, based in Tokyo and specialising in robotic systems development. The company has been working on the design for eight years, with the overall technology design having been finalised in 2018, and the development cycle including several hundred hours of field testing, causing Dymon to dub it, “the smallest but most effective wheeled rover ever produced.” A video of the little rover undergoing field testing has been released by one of the engineers working on the project that – while a little dramatic in places – highlights Yaoki’s capabilities.
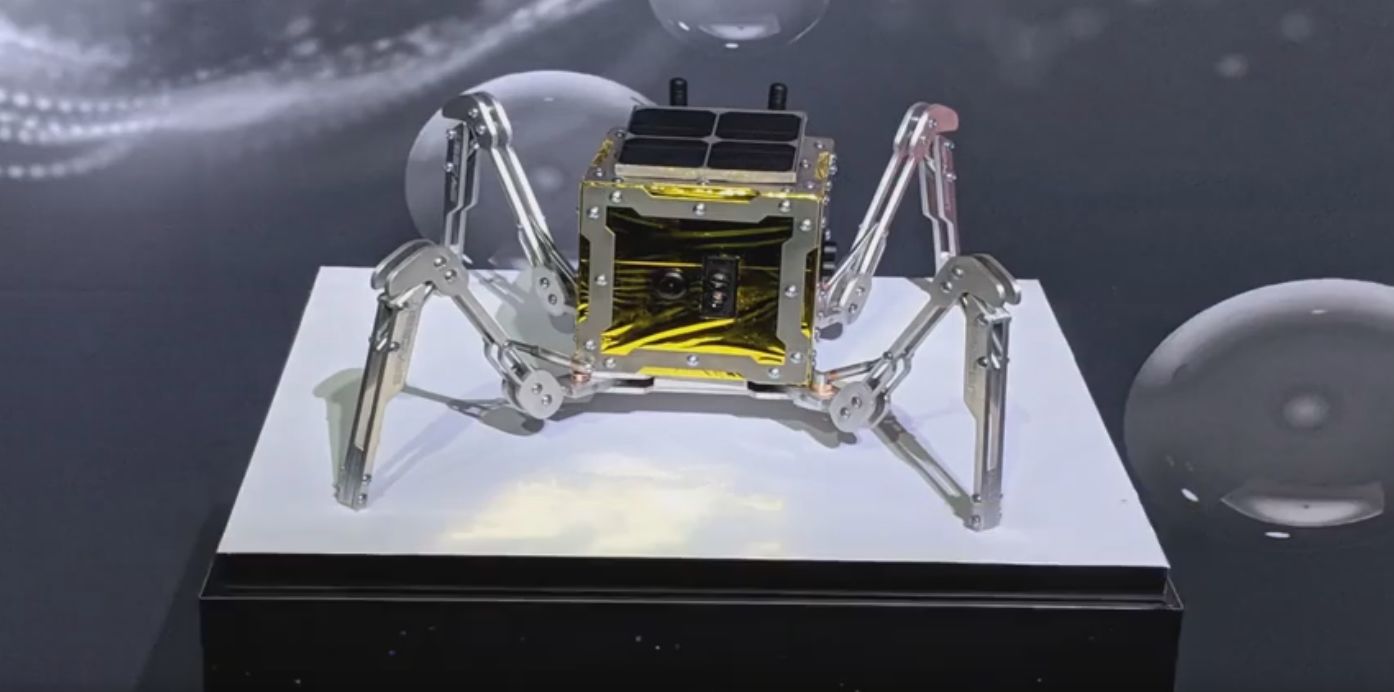
The British rover weighs-in at just 1 kg (2.2 Lb) and is solar-powered with a range of some 10 m (33 ft). However, unlike traditional rovers, it will not have wheels or even tracks – it will get around by walking on four spider-like jointed legs. Like the Japanese rover, it will be equipped with high-definition video and camera systems.
Developed by a London-based company called Spacebit, the rover is more of a proof-of-concept unit than outright science instrument; if Successful, Spacebit hope that the little rovers will become a feature of multiple missions, exploring both the surface and sub-surface regions of the lunar surface – they are specifically designed to scuttle into small lava tubes and explore them.
The Peregrine lander is designed to deliver payloads to the Moon at a cost of US 1.2 million per kilogramme in support of NASA’s Artemis lunar exploration programme. Its payload limit is some 264 kg (584 lb), although the mission carrying the two rovers – which will be the first flight for the lander will only carry 90 kg of payload. It is currently scheduled for a July 2021 launch using a United Launch Alliance Vulcan rocket – the first certification launch for that vehicle.
The cost of the mission – US $79.5 million – is being met by NASA, with the agency supply providing 14 of the lander’s total of 21 payloads, which between them will mass 90 kg and will include at least one other, larger rover vehicle. The proposed landing site is Lacus Mortis, a relatively flat northern latitude plateau. Once there, the lander and its rovers are expected to operate for 8 terrestrial days.

Venus: Water or No Water in its Past?
In September I wrote about a study that suggested Venus in its early history, might have been a temperate, wet planet, thanks to a combination of its position relative to the Sun and the fact the Sun in its early history was a lot cooler. The study also concluded that aside from a prolonged cataclysmic event, it might have been possible for Venus to remain a wet planet through until modern times. However, and is often the way with these things, another study now suggests that Venus was likely never wet.
In short, while other studies postulating Venus had a wet past – including the one pointing to the potential for the planet to have had oceans – lean heavily on atmospheric data, the latest study focuses on geological findings, notably those from one the planet’s major highland regions.

Previously, scientists thought the highlands were made up of granitic rock, just like continents on Earth. Granite needs a lot of water to form, but a survey of Venus’ Ovda Regio highlands plateau – remapped in the study using radar data gathered by NASA’s Magellan mission, that studied Venus between 1989 and 1994 shows the flow type is more typical of basalt rock, a mafic extrusive igneous rock formed from the rapid cooling of magnesium-rich and iron-rich lava.
While it is not conclusive, the new study suggests the much of the surface of Venus is of a similar composition, and therefore the result of massive lava outflows, leaving the study’s authors of the opinion that it is highly unlikely water was involved in Venus’ early history.
First All-Female Spacewalk
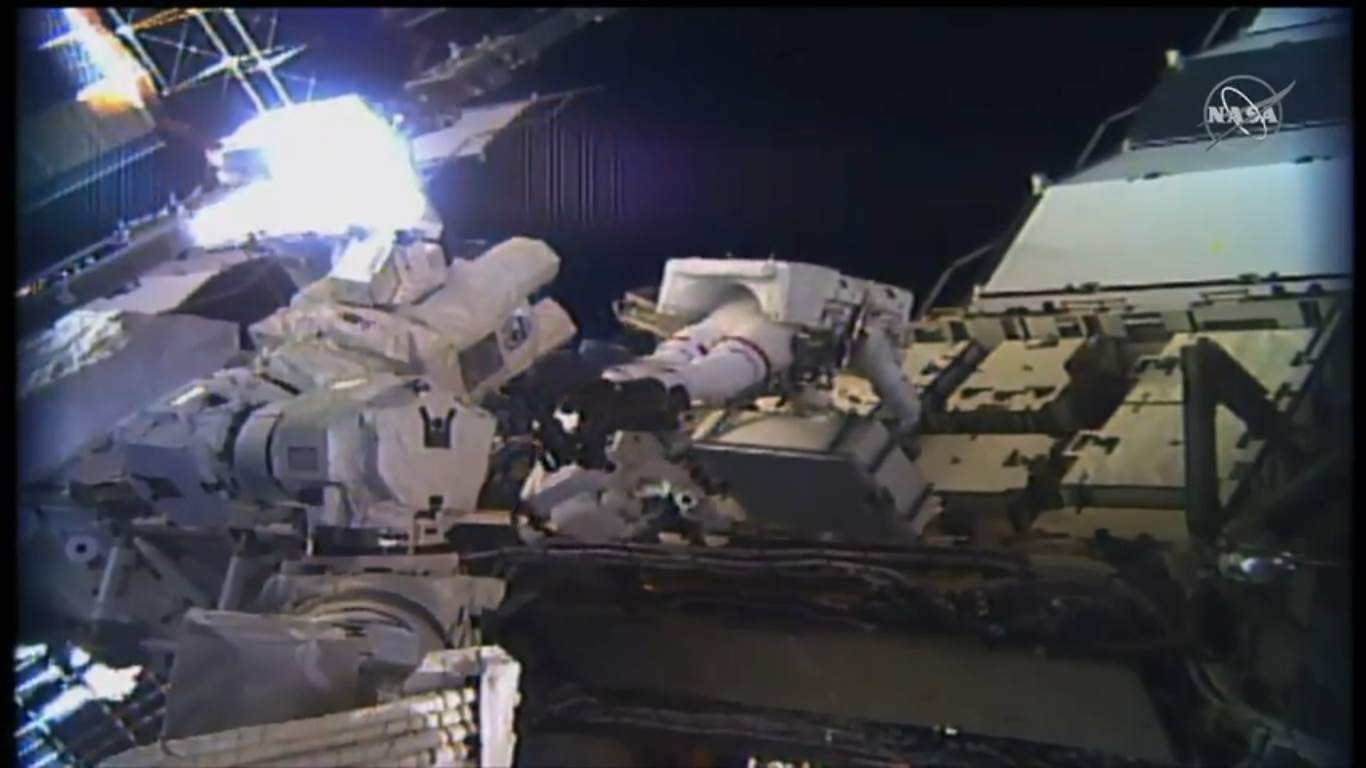
Friday, October 18th saw the very first all-female spacewalk talk place when astronauts Christina Koch and Jessica Meir moved outside of the International Space Station (ISS) to continue work in replacing some of the station’s ageing electronics – in this case a 19-year-old old charge-regulating device designed to assist the station’s main battery systems, three of which have also been replaced in a prior EVA. The batteries and regulators are part of the overall power systems that allow solar energy captured by the station’s mass of solar arrays to be converted into electrical power.
NASA originally wanted to conduct an all-female spacewalk last spring, but it had to be postponed until a delivery could be made of an additional “medium-size” space suit. Even then, the excursion had been rescheduled to take place next week, but was brought forward when the regulator failed for unknown reasons – much as one had suddenly failed earlier this year. As a result, work to install further batteries has been postponed until the reasons for the regulator failures can be determined.
Meir and Koch have been colleagues for a long time: they were both part of the 2013 astronaut intake and trained together. However, Koch had already clocked up three spacewalks prior to this one, marking her as the EVA leader (and so wearing the space suit with red stripes); by contrast, Meir is on her first flight into space. Their work marked the 221st EVA in support of the space station’s maintenance, and the 421st in the history of spaceflight. Only 42 of those EVAs have featured a woman, with the very first one occurring in 1984 by cosmonaut Svetlana Savitskaya, with 15 women in total having completed an EVA.
The first American woman to perform a space walk was Kathryn D. Sullivan aboard the space shuttle Challenger in October 1984 a few months after Savitskaya. In commemoration of Sullivan’s EVA, the spacesuit worn by Koch included unit 1008 Portable Life Support System (PLSS) – the same number backpack that Sullivan wore. Koch and Meir spent a total of 7 hours and 17 minutes outside of the ISS, and have received congratulations from around the world, together with many wishes that more all-female spacewalks will be seen in the future.
We hope that we can provide an inspiration to everybody, not only women, but to everybody that has a dream, that has a big dream, and who is willing to work hard … this is my first flight and my very first space walk, so it is a pretty incredible feeling I’m sure you can all imagine, and it’s one I will never forget.
– Astronaut Jessica Meir, commenting on her first EVA and the first
all-female space walk
Space Picture of the Week
Hubble Captures C/2019 Q4 (2I/Borisov)

