Now open at DiXmiX Gallery, curated by Dixmix Source, is Retrospective, a selection of images by Serene Footman – and it is one I thoroughly recommend for a number of reasons.
The first is that Serene is perhaps most famously known for his creation of Furillen, one of Second Life’s most atmospheric region designs that opened in December 2015 (see The beauty of a bleak midwinter in Second Life) and which became the first of a number of designs Serene developed, generally in partnership with Jade Koltai, and mostly inspired by physical world locations. Creating these regions demonstrated Serene’s eye for beauty, detail and presentation, as well as he creativity – and these are precisely the talents evidenced in the images presented through this exhibition.
DiXmiX Gallery: Serene Footman
The second reason is that until now, Serene has consistently refused invitations to display his in-world photography. Why he has changed his mind is explained in a blog post he published on the Furillen web site; I’m not going to cover the subject matter in that post, as it is personal to Serene, and as such deserves to be read first-hand and without the filter of any subjective interpretation on my part. Suffice it to say it is a personal, moving piece.
Given this is Serene’s first exhibition of photography, calling it a retrospective may seem to be a little strange. However, as some of the thirteen images present views of Serene’s own creations, the title is fitting.
DiXmiX Gallery: Serene Footman
Serene’s style, in keeping with his region designs, is marvellously focused and – as seen through the majority of the pieces offered in this exhibition – containing a wonderful sense of minimalism in which to frame a narrative. Also to be found in some is a quite delightful sense of humour that is evidenced without losing their ability to stir the imagination as well as raising a smile.
For me, the delight of this exhibition is that each piece has something to say on life and living, whether it is through the wonderful humour mentioned above, or in more subtle reflections offered through pieces like A Hen Is Just An Egg’s Way Of Making Another Egg and I Will Wade Out, or the marvellous and moving depth of pieces like Let’s Live Suddenly Without Thinking. All of which, coupled with Serene’s superb use of tone and texture, make this an exhibition that genuinely should not be missed.
DiXmiX Gallery: Serene Footman
And for those captivated with Serene’s work, I’ll also note that Furillen itself is once again back in Second Life for a time. This also should not be missed, whether or not it has been visited in the past, and again I recommend reading his blog post about its return.
It’s time to highlight another week of storytelling in Voice by the staff and volunteers at the Seanchai Library. As always, all times SLT, and events are held at the Library’s home at Holly Kai Park, unless otherwise indicated.
Monday, October 21st 19:00: Variable Star
Gyro Muggins reads Spider Robinson’s 2006 completion of an eight-page novel outline from 1955 by Robert Heinlein.
When aspiring composer and musician Joel Johnston first met Jinny Hamilton, it seems like a dream come true. And when she finally agrees to marry him, he feels like the luckiest man in the universe.
There’s just one small problem. He is broke. His only goal in life was to become a composer, and he knows it will take years before he’d be earning enough to support a family. But Jinny isn’t willing to wait; she wants Joel with her in marriage now.
Unsettled by her conviction that money wouldn’t be a problem for them, Joel presses Jinny for an explanation. Her response stuns him: ‘Hamilton’ is not her last name – it is ‘Conrad’, and her grandfather is the wealthiest man in the solar system: Robert Conrad; she had been using subterfuge to ensure whoever she fell in love with really loved her for who she was, not for her grandfather’s money. With that truth revealed, she also informs Joel of her family’s broader plans for her and her husband-to-be.
Perhaps most men in Joel’s shoes, faced with the facts that Jinny really did love him and was offering a life of wealth, might have forgiven her for hiding her identity and plans. But not Joel. So it was that he found himself trying to get as far from her and her family as possible: aboard a colony ship heading deep into space. And then came the cosmic cataclysm that would visit so much calamity on humanity as a whole.
Tuesday, October 22nd 19:00: The Spooky Classics
Caledonia Skytower reads E.F Benson.
Wednesday, October 23rd 19:00 The Mysterious Woods of Whistle Root
11-year-old Carly Bean Bitters suffers a peculiar malady: she can only sleep by the light of day, and is awake through the night, spending her time up in the attic of her aunt’s house, awaiting the arrival of the dawn.
One night, she notes a strange squash that appears on her roof. Investigating, she comes across Lewis, a fiddle-playing rat. Lewis tells Carly the squash is a replacement for one of the rats in the group who has been abducted by owls.
He goes on to explain that until recently, the owls join with the rats dancing in the moonlight within the Whistle Root woods to the music played by Lewis and has band. But then something changed, and instead of dancing with the rats, the owls took to abducting them.
Grabbed by an owl herself, Carly find herself dropped into the woods where she meets the once happy community of rats, now gravely threatened by the hostile owls. At school, and struggling to stay awake, she also finds a strange note warning that the “Moon Child” is in danger.
Enlisting the help of another strange child, Green, who spend his time hiding under the library, Carly sets out to solve the riddle of the “Moon Child” and the reason for the owls’ change in behaviour – and along the way, discovers something unexpected about herself.
Join Faerie Maven-Pralou as she reads Christopher Pennell’s 2010 novel.
Thursday, October 24th 19:00 On Dark Hallows Eve
It’s All Hallow’s Eve and Owen Weeks is not having a good day. Something stirs in the lake by his house, the dead leaves beneath his shoes crunch like bones, and even the brambles seem to twitch when he’s not looking.
But things get a lot worse as Owen discovers a terrifying stranger hiding in an abandoned farmhouse. A dark spell is invoked. Old magic, magic that raises a terrifying horde of nightmarish creatures.
As the monsters descend upon the village, Owen realizes there’s only one place left to go – across the lake. But can he survive the horror of the legends said to live below its muddy waters? The clock ticks towards midnight, and soon it will be the hour of the Pumpkin Men and of ancient terrors from a distant land.
One Dark Hallow’s Eve is a lost tale from Eldritch Black’s The Book of Kindly Deaths. and ins presented by Shandon Loring. Also in Kitely – teleport from the main Seanchai World grid.kitely.com:8002:SEANCHAI.
Logos representative only and should not be seen as an endorsement / preference / recommendation
Updates for the week ending Sunday, October 20th
This summary is generally published every Monday, and is a list of SL viewer / client releases (official and TPV) made during the previous week. When reading it, please note:
It is based on my Current Viewer Releases Page, a list of all Second Life viewers and clients that are in popular use (and of which I am aware), and which are recognised as adhering to the TPV Policy. This page includes comprehensive links to download pages, blog notes, release notes, etc., as well as links to any / all reviews of specific viewers / clients made within this blog.
By its nature, this summary presented here will always be in arrears, please refer to the Current Viewer Release Page for more up-to-date information.
Note that for purposes of length, TPV test viewers, preview / beta viewers / nightly builds are generally not recorded in these summaries.
Official LL Viewers
Current Release version 6.3.2.530962, formerly the Vinsanto Maintenance RC viewer, dated September 17, promoted October 15th – NEW.
Release channel cohorts:
Maintenance RC viewer, version 6.3.3.531784, released on October 18th.
Voice RC viewer updated to version 6.3.3.531811 on October 18th.
The arm-mounted camera on NASA’s InSight lander captures an image of the scoop at the end of the arm pushing gently against the HP³ “mole” in an attempt to get it burrowing once more. The data cable trailing from the “mole” is packed with sensors designed to measure sub-surface heat flow, and so reveal more about the interior of Mars. Credit: NASA/JPL
NASA’s attempts to free the heat-sensing “mole”, deployed onto the surface of Mars by the InSight lander mission at the end of 2018 have met with some success.
As I reported at the start of October, the “mole”, a special probe that forms a key part of the Heat Flow and Physical Properties Package (HP³), is designed to propel itself up to 5 metres (16 ft) beneath the surface of Mars in order to record the amount of heat escaping from the planet’s interior, helping scientists determine more about the planet. However, Since February of 2019, it has been stuck, having travelled just 30 cm and leaving it partially sticking out of the ground. Numerous attempts to get it moving again have been tried, none of which, up until this most recent attempt, had managed to get the “mole” moving again.
The problem was believed to be down to the self-propelled probe being unable to generate sufficient friction against whatever material it had burrowed into in more to gain downward traction. At that time, I noted that the mission team where hoping to use the lander’s robot arm to apply direct pressure against the exposed portion of the probe in the hope of pushing it against the side of the hole it has so far created, giving it sufficient traction to resume burrowing.
On October 14th, 2019, the German team responsible for the “mole” confirmed the attempt had worked: the probe had resumed progress during the initial test, burrowing a further 3 cm (just over an inch). That may not sound much, and it certainly doesn’t mean the “mole” is in the clear; however, it does tend remove the other lurking fear: that the probe had in fact hit a solid mass such as a boulder or rock that was impeding its downward progress.
In this image, the “mole” can be see canted to one side, giving rise to fears it may have struck a large rock or boulder beneath the surface and was being pushed sideways each time it tried to propel its way forward. Given it has now moved downwards once more, the risk of a rock being in the way now seems unlikely. Credit: NASA/JPL
The mole still has a way to go, but we’re all thrilled to see it digging again. When we first encountered this problem, it was crushing. But I thought, ‘Maybe there’s a chance; let’s keep pressing on.’ And right now, I’m feeling giddy.
– Troy Hudson, JPL engineer-scientist leading the US side of
efforts to get the “mole” moving again
This doesn’t mean the “mole” is free and clear however; the extent of the loose material it appears to have burrowed into is unknown, and as the data cable connected to it cannot be used to simply haul it back out of the initial hole, the decision has been made to keep the scoop of InSight’s robot arm pressed against the exposed portion of the probe until such time as it can no longer provide support. The hope is that by the time this has happened, the mole will have moved beyond the looser material that seems to be hampering downward movement. However, in case if it has not, the team are now looking at other options to try to assist the probe – such as filling-in the hole behind it in the hope that sufficient material falls around it to provide it with the traction it needs.
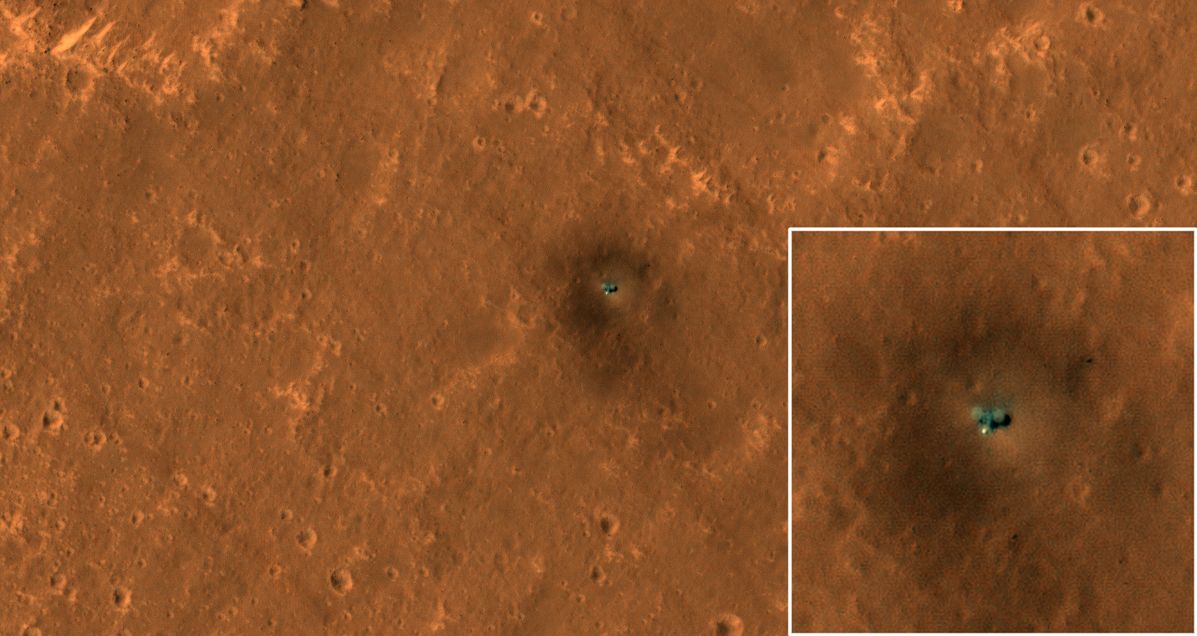
Throughout its time on Mars, InSight has been under observation by NASA’s Mars Reconnaissance Orbiter, which routinely passes over the Elysium Planitia region where InSight landed. As such, it has been able to image the lander on several occasions, but on September 23rd, 2019, MRO directly overflew InSight’s landing site at an altitude of 272 km (169 mi), and the orbiter’s HiRISE imaging system captured what is regarded as the best image yet of InSight (blow).
The HiRISE camera on NASA’s Mars Reconnaissance Orbiter got its best view yet of the InSight lander on September 23rd, 2019. Image credit: NASA/JPL / University of Arizona
The main image above shows the lander on the surface of Mars surrounded by the blast circle left by its landing motors. The inset image shows the lander in greater detail, revealing its two circular solar panels, each just over 2 m (7 ft) across (in green), with the body of the lander between them (brighter green). The bright dot just below the lander is the protective dome covering the seismometer deployed to the surface of Mars along with the HP³ mentioned above. Also visible in the main image is a series of diagonal streaks on the Martian surface. These are the tracks left by dust devils that have passing through the area.
As well as issuing the image of InSight on October 16th, NASA also released an animated GIF showing the Mars Science Laboratory’s progress up the slopes of “Mount Sharp” (Aeolis Mons). The GIF switches between two shots of “Mount Sharp” taken at the same overhead angle and roughly two months apart. Between them, they show Curiosity’s progress across 337 m (1,106 ft) of what was dubbed the “clay bearing unit”. The first image, which has Curiosity circled near the top, was captured on May 31st, 2019 as the rover was sitting within “Woodland Bay”. The second image shows Curiosity on July 20th, 2019, as it sat on a part of the unit called “Sandside Harbour” further up the slopes of “Mount Sharp”.
Curiosity, as seen by MRO on May 31st, 2019 (top) and July 20th, 2019 (centre), as the rover traversed the “clay bearing unit” on the slopes of “Mount Sharp”. Credit: NASA/JPL / University of Arizona
UK and Japan Plan to Send Rovers to the Moon
Both the United Kingdom and Japan are planning to become part of a select community (thus far!) of countries that have operated rover vehicles on the surface of the Moon.
To date, only three nations have operated rover vehicles on the lunar surface: Russia, with its Lunokhod 1 and Lunokhod 2 rovers, China with its Yutu rovers (all of which were automated vehicles) and America with the Apollo lunar roving vehicle famously driven by the astronauts of Apollo 15 through 17. The Japanese and British rovers will be very small, as carried to the Moon as part of a robotic lander called Peregrine being developed by US commercial organisation, Astrobotic, one of the former contenders for the Google Lunar X Prize.
The Japanese rover, called Yaoki, is a single axle vehicle designed by Dymon Co., Ltd, based in Tokyo and specialising in robotic systems development. The company has been working on the design for eight years, with the overall technology design having been finalised in 2018, and the development cycle including several hundred hours of field testing, causing Dymon to dub it, “the smallest but most effective wheeled rover ever produced.” A video of the little rover undergoing field testing has been released by one of the engineers working on the project that – while a little dramatic in places – highlights Yaoki’s capabilities.
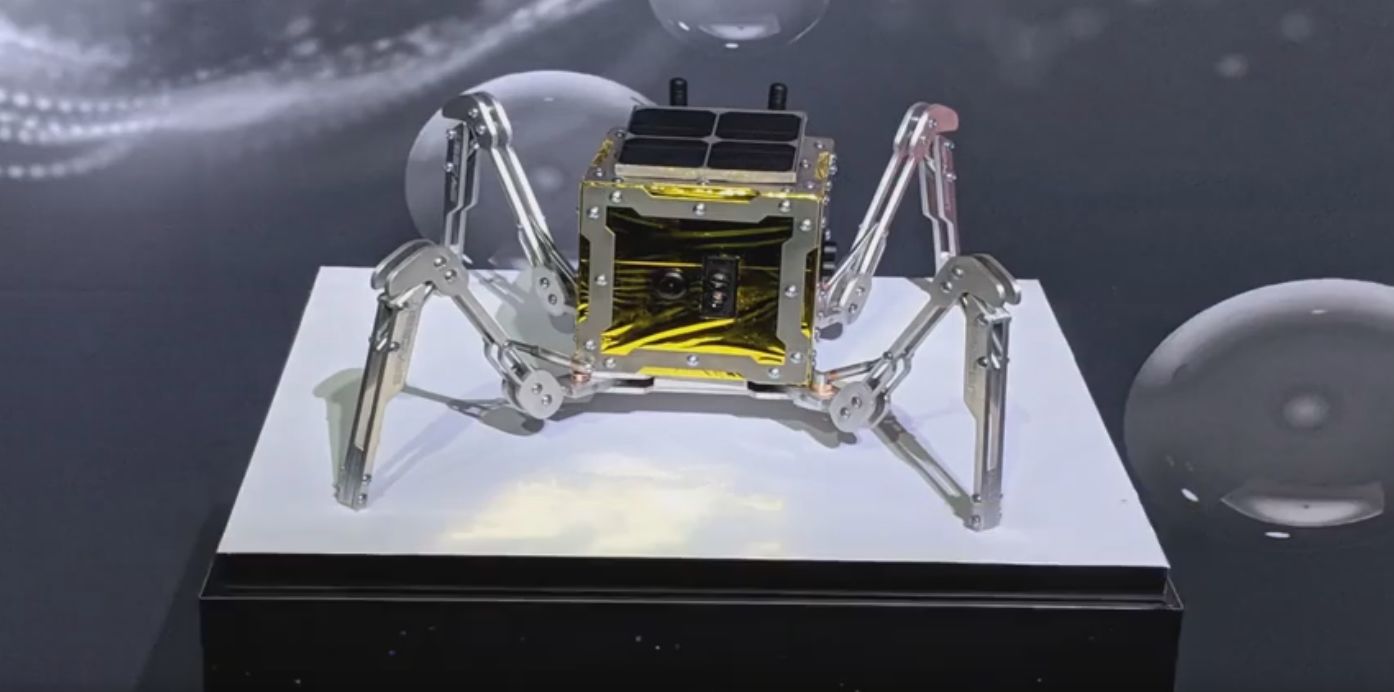
The British rover weighs-in at just 1 kg (2.2 Lb) and is solar-powered with a range of some 10 m (33 ft). However, unlike traditional rovers, it will not have wheels or even tracks – it will get around by walking on four spider-like jointed legs. Like the Japanese rover, it will be equipped with high-definition video and camera systems.
Developed by a London-based company called Spacebit, the rover is more of a proof-of-concept unit than outright science instrument; if Successful, Spacebit hope that the little rovers will become a feature of multiple missions, exploring both the surface and sub-surface regions of the lunar surface – they are specifically designed to scuttle into small lava tubes and explore them.
A model of the Spacebit rover. Credit: Spacebit
The Peregrine lander is designed to deliver payloads to the Moon at a cost of US 1.2 million per kilogramme in support of NASA’s Artemis lunar exploration programme. Its payload limit is some 264 kg (584 lb), although the mission carrying the two rovers – which will be the first flight for the lander will only carry 90 kg of payload. It is currently scheduled for a July 2021 launch using a United Launch Alliance Vulcan rocket – the first certification launch for that vehicle.
The cost of the mission – US $79.5 million – is being met by NASA, with the agency supply providing 14 of the lander’s total of 21 payloads, which between them will mass 90 kg and will include at least one other, larger rover vehicle. The proposed landing site is Lacus Mortis, a relatively flat northern latitude plateau. Once there, the lander and its rovers are expected to operate for 8 terrestrial days.
An artist’s impression of the Peregrine lunar lander. Credit: Astrobotic