
On Friday, January 11th, 2019, Elon Musk tweeted the first official image of the completed Starship Hopper, the new SpaceX vehicle intended to be an atmospheric test vehicle for the company’s massive Starship vehicle that forms the upper stage of what used to be called the Big Falcon Rocket, the huge lunch system SpaceX is developing.
The vehicle has been under construction at the SpaceX test facility at Boca Chica since December 2018, with the work, surprisingly, being carried out in the open, allows passers-by to photograph and film the work and post to assorted social media, causing something of a stir.
Hopper is not as large as the operational Starship vehicle will be (it is around 40 m / 130 ft tall, compared to Starship’s 52 m / 169 ft height). However, it is the same diameter (9 metres / 29 ft) and highlights the “radical” redesign of the vehicle, such as its more “retro” rocket ship look, and redesigned tail fins (which also double as its landing legs).

The vehicle is intended to be self-powered, using its own engines to fly to altitude, before making a controller descent and landing in the same manner as the full-sized vehicle. In this, its function mimics that of the SpaceX Grasshopper – a specially designed Falcon 9 first stage the company flew in order to learn about the handling characteristics of a Falcon 9 first stage attempting to make a controlled landing after a launch. Flights will initially be to low altitudes, then increase in height.
While Musk’s tweets indicated assembly of the vehicle was finished, further work is required to replace the temporary motors fitted to the vehicle with the flight-capable, methane-fuelled Raptor engines that will power it during ascent and descent. By the time the engines are fitted, the tail fins will have been fitted with shock absorbers to protect the vehicle against the impact of landings, and landing pads.
The “wrinkled” look to the vehicle’s hull is the result of the hull sections being made from a type of stainless-steel alloy which it is believed will be withstand atmospheric entry without the need for complex (and heavier) surface layering, such as reinforced carbon-carbon. Musk has indicated that the skin of the actual Starship will be smooth, and the vehicle will have “a smoothly curving nose section” (and windows).
In terms of the full size vehicle, the first of these is currently being fabricated, together with its booster stage – now simply called “Super Heavy”. Musk has indicated these could be ready as early as June 2019. Once operational, there will likely to be three versions of Starship:
- The long-duration spacecraft capable of carrying passengers and /or cargo to interplanetary destinations such as the Moon and Mars or to LEO
- A propellant tanker design to refuel other spacecraft – notably the passenger vehicle – whilst in low-Earth orbit.
- A satellite delivery spacecraft with a large cargo bay and forward door, capable of placing both satellites and other payloads in Earth orbit, or recover items for return to Earth.
The accelerated pace of Starship / Super Heavy development is in keeping with Musk’s goal of flying Japanese billionaire Yusaku Maezawa and an entourage of artists around the moon and back in the mid-2020s. However, it comes at something of a cost. On the same day as Musk tweeted about the Hopper, SpaceX announced it would be laying-off around 10% of its current workforce, some 600 people, as it refocuses efforts on its new launch system and its broadband satellite system.
To continue delivering for our customers and to succeed in developing interplanetary spacecraft and a global space-based Internet, SpaceX must become a leaner company. “Either of these developments, even when attempted separately, have bankrupted other organisations. This means we must part ways with some talented and hard-working members of our team.
– Official SpaceX announcement
To further provide revenue, the company is also mid-way through a US $500 million funding round.
A Steampunk Explorer?
It sounds like something out of a Steampunk novel, but a collaboration between a private space company and the University of Central Florida has shown that a vehicle sent to the asteroids could explore them “indefinitely” using steam power to propel itself from asteroid to asteroid.
Honeybee Robotics, based in California, and the University of Central Florida (UCF) have developed a vehicle they called World Is Not Enough (WINE), capable of extracting water from asteroids or other planetary bodies, which it then uses as steam to propel itself to its next mining target. This effectively means it – or a vehicle like it – could become capable of indefinite self-refuelling and explore somewhere like the asteroid belt for decades.
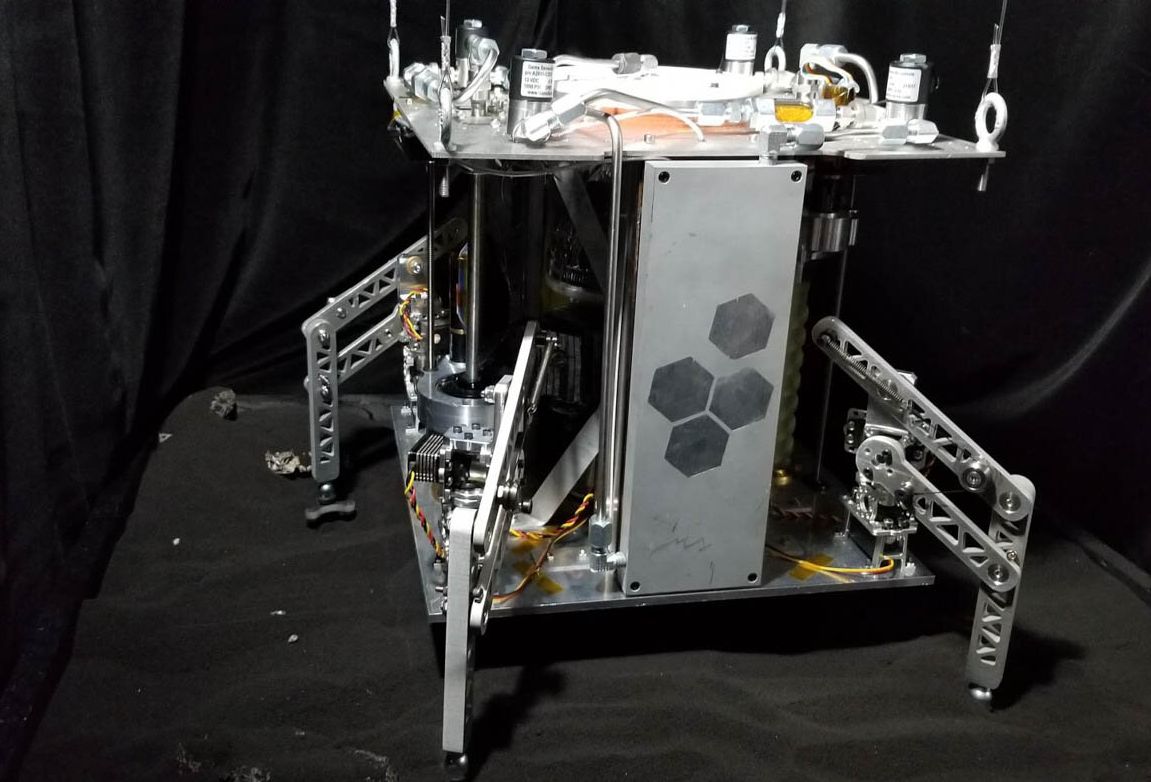
UCF planetary research scientist Phil Metzger performed extensive computer modelling and simulations over three years in order to show the feasibility of steam propulsion, with the university developing simulated asteroid material that could be used as a feedstock. This work allowed Honeybee Robotics to build the microwave oven sized prototype, with Florida-based Embry-Riddle Aeronautical University providing the steam-powered rocket motors. The complete system was demonstrated for the first time on December 31st, 2018.
It’s awesome. WINE successfully mined the soil, made rocket propellant, and launched itself on a jet of steam extracted from the simulant. We could potentially use this technology to hop on the Moon, Ceres, Europa, Titan, Pluto, the poles of Mercury, asteroids—anywhere there is water and sufficiently low gravity.
– Phil Metzger, UFC, on the WINE prototype demonstration
One of the biggest constraints on robotic missions is the amount of fuel they can carry for manoeuvring. Being able to generate its own rocket propellant in the form of steam frees a vehicle from this constraint. All that is required is a suitable feedstock (and there is ice aplenty to be found throughout the solar system) and electrical energy, which could be supplied via solar panels or a small nuclear RTG “battery”.
Funding for the project has thus far been supported by the NASA Small Business Technology Transfer programme, intended to foster collaboration between universities and small businesses in the development of marketable commercial products. UFC and Honeybee are now seeking partners to continue development of the system.
InSight Deploys SEIS and Marsquake Hunting Begins
On December 19th, 2018, NASA’s InSight lander deployed the SEIS science package to the surface of Mars using its robotic arm.
The Seismic Explorations for Interior Structure instrument, comprising a sensitive seismometer and protective copper-coloured shield, will measure seismic waves caused by marsquakes, meteorite strikes and other phenomena. Watching how these waves travel through Mars’ interior will let scientists study how the planet’s crust, mantle and core are layered. It will also reveal more about how all rocky bodies are formed, including Earth and its Moon.
The deployment came well ahead of the schedule indicated shortly after InSight arrived on Mars on November 26th, 2018. At that time, it was anticipated the deployment would occur about 2 or so months after touchdown.
InSight’s timetable of activities on Mars has gone better than we hoped. Getting the seismometer safely on the ground is an awesome Christmas present.
– InSight project manager Tom Hoffman
In order to make the deployment mission staff used the camera system mounted on the lander’s robot arm to survey the area directly in front of the lander (see my December 16th Space Sunday report for more). The images gathered were used – with the aid of augmented reality – to build a sandbox of the immediate area in front of the lander, allowing them to accurately determine where SEIS should be placed.
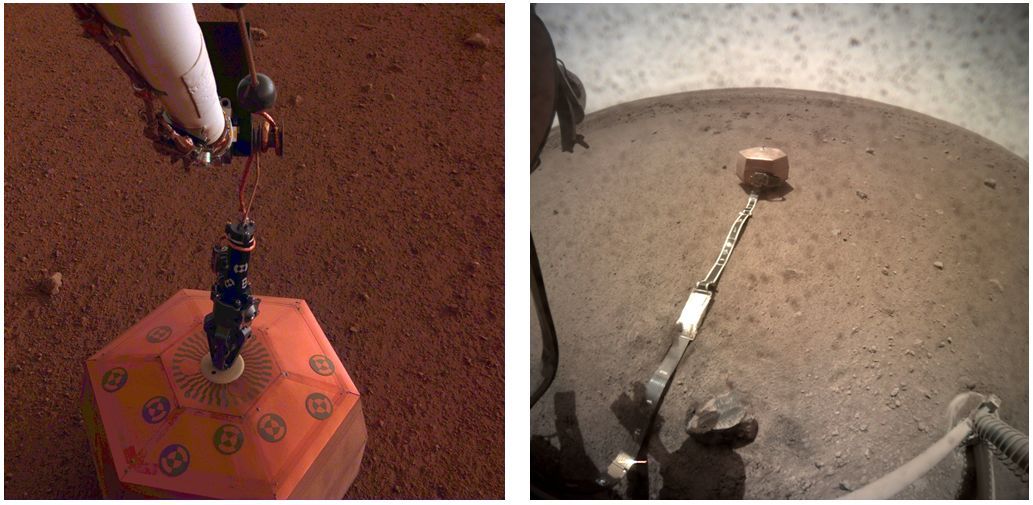
Following the initial deployment, the control cable to the instrument was left suspended from the deck of the lander while SEIS went through a series of self-levelling adjustments and sensor adjustments, which continued through until early January 2019.
Seismometer deployment is as important as landing InSight on Mars. The seismometer is the highest-priority instrument on InSight: We need it in order to complete about three-quarters of our science objectives.
– InSight principal investigator Bruce Banerdt
On January 7th, 2019, the cable was lowered to the ground to prevent the relatively weak Martian wind from vibrating it and interfering with reading from SEIS. This allowed final checks to be run in readiness for SEIS to start listening to the Martian interior.
This work began on January 11th, 2019 after the seismometer’s developer, French space agency CNES indicated SEIS had successfully completed all initial tests. It marked the first seismometer to successfully begin work on another world since NASA’s Apollo 17 moon landing in 1972, when astronaut Harrison Schmitt deployed a that mission’s Apollo Lunar Surface Experiments Package — a sensor suite that included a lunar seismometer.
This is a historic moment and a great hope for geophysics. The two U.S. Viking 1 and Viking 2 missions launched by NASA in 1975 were each carrying a seismometer. One failed to function, while the other — fixed to the deck of the lander — was unable to measure Mars’ seismic activity as it was too sensitive to the background noise generated by winds. SEIS is thus the first instrument of its kind to be placed on the surface of the Red Planet.
– CNES official statement on SEIS commencing operations
The second surface instrument, the Heat Flow and Physical Properties Probe, or HP3, which will observe how heat moves through the planet’s surface, will most likely be deployed towards the end of January 2019. The video below includes a summary of the December 19th, 2018 SEIS deployment.
In Brief
Chang’e 4: Why Does the Moon Look Red?
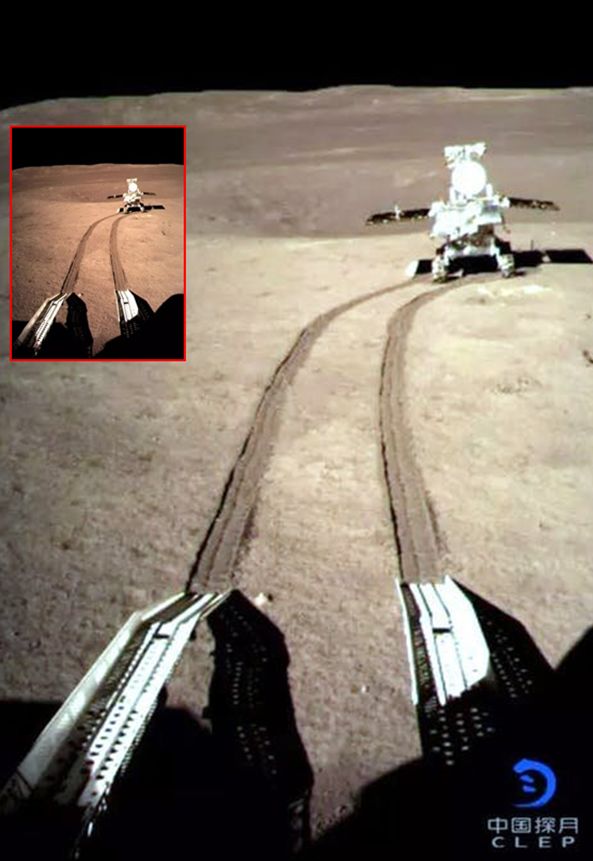
Following the arrival of China’s Chang’e 4 lander on the Moon’s far side on January 3rd, 2019, questions were asked about why the images it sent back to Earth showed a red lunar surface, rather than the more usual grey.
The reason is simple. Like all modern space vehicles, Chang’e 4 uses a digital system to capture images. These record images using three individual sensors, rather than a single lens, capturing light in red, green and blue.
Due to the nature of the sensors, some can be more sensitive than others. In the case of Chang’e 4 the green and blue sensors are less sensitive to their respective colours than the red. Thus, when the data is initially recombined as a “raw” image, the red tends to dominate. Result: the surface of the Moon looks rust red.
Normally what happens is the raw images are further colour corrected using histogram data that is separately recorded alongside of each image capture. However, this processing can initially be time-consuming, as all of the data has to be evaluated and the adjustments made. To this end, the raw images are often offered first, and until such time as the actual ambient lighting has been assessed, allowing for quicker colour correction of received images.
NASA Delays SpaceX Commercial Crew Test Launch
NASA has confirmed the first uncrewed test flight of the SpaceX Crew Dragon has been delayed.
Demo-1 or DM-1, comprising the first space-ready Crew Dragon capsule atop a Falcon 9 booster, was rolled out to Kennedy Space Centre’s Pad 39A on January 3rd, 2019, with a target launch date of January 17th.
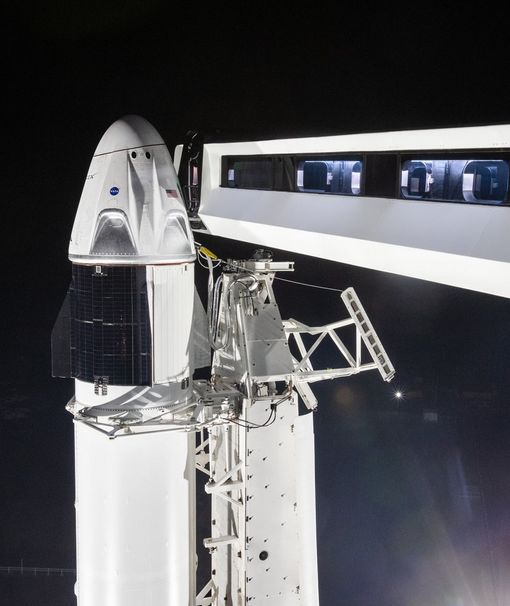
However, prior to the launch taking place, the vehicle must undergo a final set of tests and reviews, carried out jointly by NASA and SpaceX.
In a statement released by NASA on January 10th, it was indicated the launch would take place “no earlier than February”, in order to allow these tests and reviews to be properly completed.
While not expressly indicated in the NASA statement, it is believed the delay has been triggered by the current US Government shut-down that started on December 22nd, 2019. It has meant that around 95% of NASA’s civil servant workforce – including those responsible for the final pre-launch tests and inspections – has been furloughed, preventing any final check-out of the Falcon vehicle being completed.
When it does take place, DM-1 place the Crew Dragon capsule in orbit where as series of automated tests will be performed prior to it rendezvousing with the International Space Station (ISS). The vehicle will then attempt a return to Earth using the same flight profile as the crewed vehicle.
Depending on the outcome, DM-1 will be followed by a crewed flight, possibly in June 2019, which will carry NASA astronauts Bob Behnken and Doug Hurley to the ISS.
In preparing for the DM-1 flight, Musk has indicated SpaceX views the initial Crew Dragon flights as high-risk, tweeting they “will be extremely intense. Early flights are especially dangerous, as there’s a lot of new hardware.”
