On Wednesday, October 19th, 2016, the European Space Agency (ESA) attempted, for them, a double first: placing a vehicle successfully in orbit around Mars (the Trace Gas Orbiter, or TGO) and landing a vehicle on the planet’s surface (the Schiaparelli demonstrator).
Launched in March 2016, TGO is the second European orbiter mission to Mars, the first being Mars Express, which has been operating around the red planet for 12 years. TGO’s mission is to perform detailed, remote observations of the Martian atmosphere, searching for evidence of gases which may be possible biological importance, such as methane and its degradation products. At the same time, it will to image Mars, and act as a communications for Europe’s planned 2020 Mar rover vehicle.
TGO’s primary mission won’t actually start until late 2017. However, October 19th marked the point at which the vehicle entered its preliminary orbit around Mars. Orbital insertion was achieved following a 139-minute engine burn which slowed the vehicle sufficiently to place it in a highly elliptical, four-day orbit around Mars. Early next year, the spacecraft will begin shifting to its final science orbit, a circular path with an altitude of 400 km (250 mi), ready to start its main science mission.
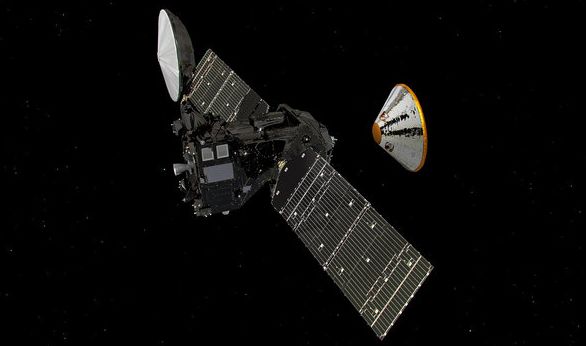
On Sunday, October 16th, prior to orbital insertion, TGO had bid farewell to the 2-metre diameter Schiaparelli Entry, Descent and Landing Demonstrator Module (EDM), which it had carried to Mars. The EDM was specifically designed to gather data on entry into, and passage through, the Martian atmosphere and test landing systems in preparation for ESA’s 2020 rover mission landing.
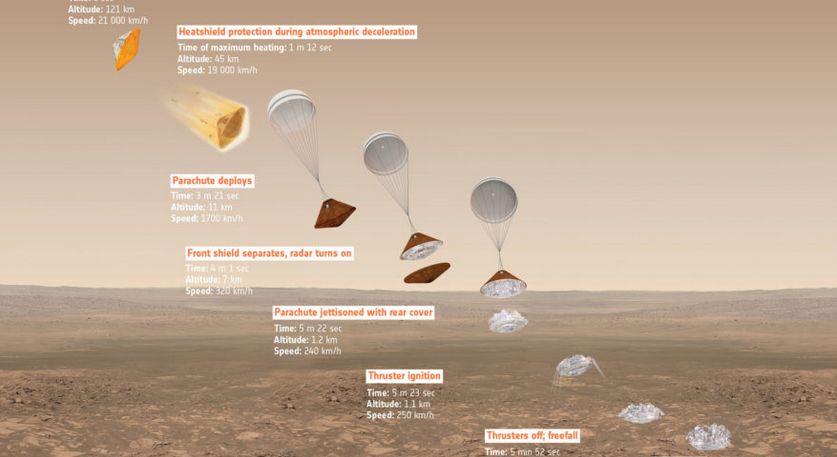
Once separated from TGO, Schiaparelli travelled ahead of the orbiter, entering the Martian atmosphere at a speed of 21,000 km/h (13,000 mph; 5.8 km/s / 3.6 mi/s), at 14:42 UT on October 19th. After using the upper reaches of the Martian atmosphere to reduce much of its velocity, Schiaparelli should have proceeded to the surface of Mars using a mix of parachute and propulsive descent, ending with a short drop to the ground, cushioned by a crushable structure designed to deform and absorb the final touchdown impact. Initially, everything appeared to go according to plan. Data confirmed Schiaparelli had successfully entered the Martian atmosphere and dropped low enough for the parachute system to deploy. Then things went awry.
Analysis of the telemetry suggests Schiaparelli prematurely separated from its parachute, entering a period of free fall before the descent motors fired very briefly, at too high an altitude and while the lander was moving too fast. Shortly after this, data was lost. While attempts were made to contact the EDM using ESA’s Mars Express and NASA’s Mars Reconnaissance Orbiter (MRO) it was not until October 20th that Schiaparelli’s fate became clear.
Images taken by MRO of Schiaparelli’s landing zone revealed a new 15x40m (49x130ft) impact crater, together with a new bright object about 1 kilometre south of it. The crater is thought to be Schiaparelli’s impact point, and the latter the lander’s parachute and aeroshell.
In releasing the NASA images on October 21st, the European Space Agency stated,”Estimates are that Schiaparelli dropped from a height of between 2 and 4 km (1.4-2.4 mi), impacting at a speed greater than 300 km/h (186 mph). It is also possible that the lander exploded on impact, as its thruster propellant tanks were likely still full.”
While the lander carried a small suite of science instruments which would have been used to monitor the environment around it for a few days following the landing, the major part of the mission was to gather data atmospheric entry and the use of parachute and propulsive descent capabilities. ESA believe this part of the mission to have been a success, even with minimal data gathered on the propulsive element of the descent.
In the meantime, TGO is currently on a 101,000 km x 3691 km orbit (with respect to the centre of the planet). It is fully functional, and will undertake instrument calibration operations in November, prior to commencing the gentle aerobraking manoeuvres designed to reduce and circularise its orbit around Mars.
Shenzhou-11 Docked with Tiangong-2

Having departed China’s Jiuquan Satellite Launch Centre in the early hours (local time) on Monday, October 17th aboard their Shenzhou-11 spacecraft, tiakonauts Jing Haipeng and Chen Dong arrived at the Tiangong-2 orbital laboratory on Wednesday, October 19th at 03:24 Beijing time (19:24 UT Tuesday, October 18th). Their arrival marked the start of a 30-day stay aboard the orbital facility, launched in September 2016.
The rendezvous and docking took place 393km (244 mi) above Earth, with the remotely controlled procedure lasting about two hours. Once attached to the laboratory module, the two Tiakonauts removed their pressure suits and donned powder blue jumpsuits similar to those used by NASA, before opening the hatch between space vehicle and laboratory.
Mission commander Jing Haipeng, making his third trip into space, entered Tiangong-2 first, where he waved to an audience watching via a live television relay. Rookie Chen Dong then floated into the main compartment of the station, looking a little unsteady and gently assisted by his commander. Both men then saluted before receiving a message of congratulations from the Chinese premier, after which Jing Haipeng made a brief statement.

Since their arrival, the two tiakonauts have been carrying out a range of tasks related to the fourteen major experiments aboard the laboratory, which focus on cutting-edge technologies such as space materials science and space life science. Included in the equipment aboard the laboratory is a gamma-ray detector, and a space-Earth quantum key distribution and laser communications experiment to be used in conjunction with the Mozi Quantum Science Satellite, and the world’s first-ever in-space cold atomic fountain clock.
On Sunday, October 23rd, the crew launched a small satellite directly from the station. Weighing 47 kg (106 lb) and roughly the size of a laser printer, the mini satellite is able to operate autonomously, and will used in conjunction with experiments carried out aboard the laboratory, as well fly around the Tiangong-2 / Shenzhou-11 combination, taking high-resolution images of both.

At least one more crew will visit the facility later in 2017. Prior to that Tiangong-2 will receive the automated cargo tug Tianzhou-1 (“Heavenly Ship-1”). Based on the earlier Tiangong-1 orbital facility, Tianzhou-1 will deliver additional supplies and equipment ready for the second crew, and carry out an automated refuelling of the lab’s propellant tanks.
Antares Success
After a delay of 24 hours, Orbital ATK’s re-worked Antares booster lifted-off from NASA’s Wallop’s Flight Centre, Virgina, on the evening of Monday, October 17th, on its way to delivering 2.5 tonnes of supplies aboard a Cygnus resupply vehicle, to the International Space Station (ISS).

The booster took flight at 19:45 EDT, the first night launch for Antares, its first launch since a catastrophic failure shortly after lift-off on October 28th, 2014. As it rose into the sky, so it was visible for tens of miles around the launch facility. Nine minutes after launch, and with the first stage of the rocket already separated, the Cygnus resupply vehicle successfully separated from the second stage, and commenced a leisurely chase to catch up with the space station.
“Leisurely”, because between the launch and the arrival of Cygnus at the ISS, a Russian Soyuz space vehicle departed the Baikonur Cosmodrome in Kazakhstan, carrying cosmonauts Sergey Ryzhikov and Andrey Borisenko and US astronaut Shane Kimbrough, also heading for the ISS. As this vehicle was scheduled to arrive at the space station ahead of Cygnus, the latter was programmed to take the “long route” to the station, thus avoiding conflicts with both vehicles arriving at the same time.

The Soyuz, piloted by rookie Ryzhikov, lifted-off on Wednesday October 19th (a busy day for space activities!), and linked up with the space station on October 21st, 403 km (251 mi) over southern Russia. Shortly afterwards, having secured their vehicle and changed into their jumpsuits, Ryzhikov, Kimbrough and Borisenko became the 49th crew to board the ISS, where they joined current expedition commander Anatoly Ivanishin, NASA astronaut Kate Rubins and Japanese astronaut Takuya Onishi.
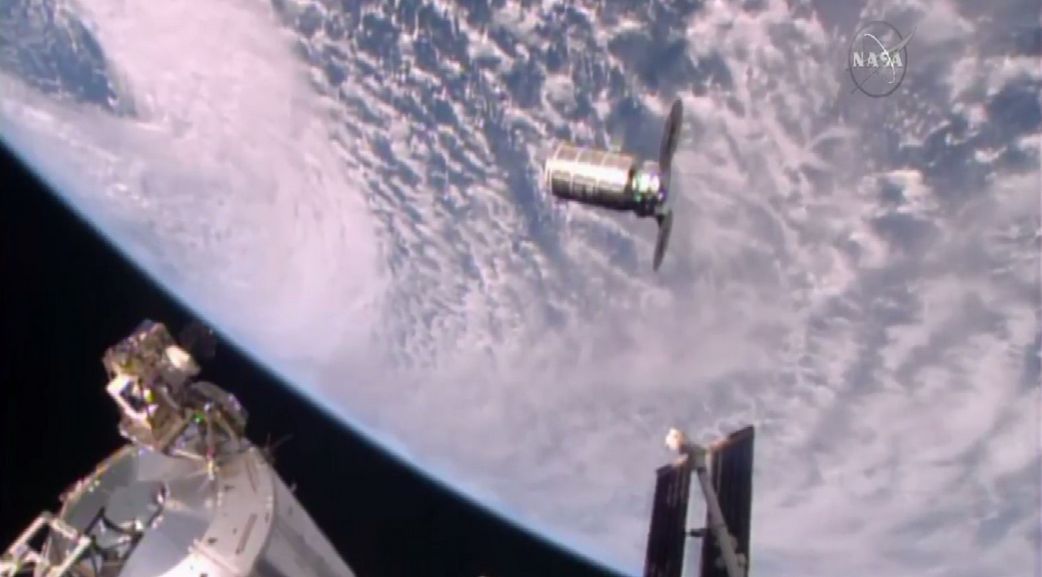
The Cygnus vehicle rendezvoused with the space station on Sunday, October 23rd. As the vehicle isn’t capable of automated docking with the ISS, it came to a stop relative to the station, close enough for Takuya Onishi, supported by Kate Rubins, to use the 17.6 m (57.7 ft) robot arm to securely capture it at 11:28 UT. Under control from Earth, the arm will be used to dock the Cygnus with the station’s Unity module. Transfer of material from and to the vehicle will take around a month, after which it will be detached from the station loaded with waste and rubbish, and allowed to incinerate itself as it re-enters Earth’s atmosphere.
Juno Caught in Safe Mode
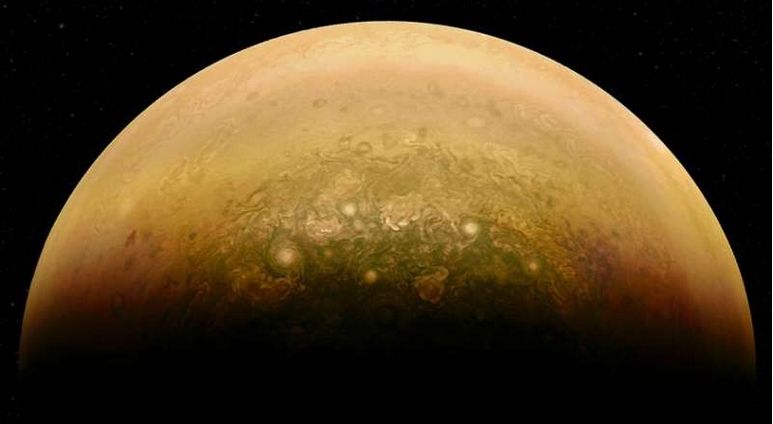
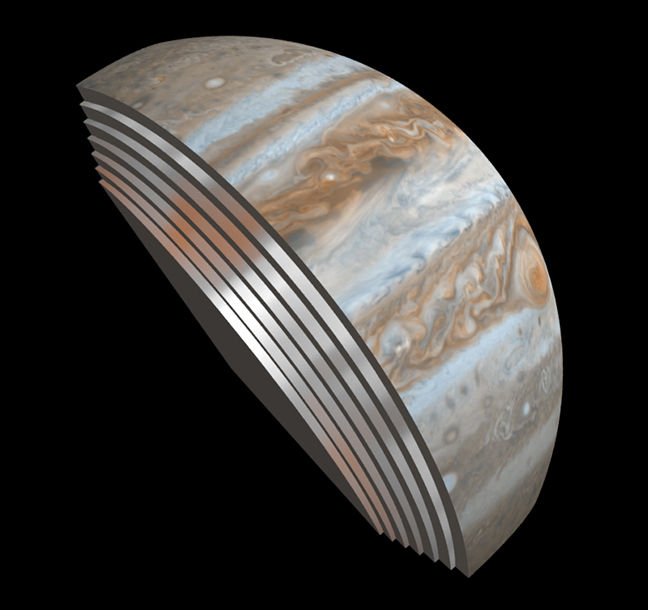
On Wednesday, October 19th NASA’s Juno mission made its third close pass of Jupiter since its arrival in the Jovian system in August. The fly by should have seen the vehicle complete an engine burn designed to reduce its elliptical 53.5 day orbit to a more circular one of just 14 days, allowing the primary science mission to commence.
However, the manoeuvre was formally cancelled on October 17th, after telemetry indicated a possible fault with a set of valves in the propulsion unit. Instead, and providing the valve issue can be determined as non-threatening, the braking manoeuvre will now take place during Juno’s next close pass over Jupiter on December 11th.
As the October 19th close approach was to be timed with an engine burn, it had been planned to turn off the majority of Juno’s science suite as a precautionary measure. With the burn cancelled, it was decided to leave all the science instruments running – only to have fate step in again.
Some 13 hours before the point of closest approach above Jupiter’s cloud tops, Juno suddenly switched itself into a “safe” mode.
Regular readers of this column will know such modes are activated when a robot vehicle encounters an unexpected and potentially harmful event. They are intended to prevent the vehicle damaging itself, while allowing diagnostics to be run and communications maintained with Earth.
In this case, a software performance monitor caused Juno’s computer to reboot itself. While the transition to safe mode and subsequent reboot were successful, they placed Juno in a diagnostic mode, with all science instruments shut down. so no data could be gathered during the close approach. and enter a diagnostic state, shutting down all of the science instruments in the process.
At the time of writing, the cause of the problem is still being investigated, although it is not believed to be related to the engine valve problem. Juno otherwise appears to be healthy, and I’ll hopefully have a follow-up on the situation in the next Space Sunday report.
