 Curiosity is continuing to work towards the delivery of samples obtained from inside a rock dubbed “John Klein” to the onboard Chemical and Mineralogy (CheMin) and Sample Analysis at Mars (SAM) suites of instruments aboard the rover itself.
Curiosity is continuing to work towards the delivery of samples obtained from inside a rock dubbed “John Klein” to the onboard Chemical and Mineralogy (CheMin) and Sample Analysis at Mars (SAM) suites of instruments aboard the rover itself.
As reported in my last update, Curiosity obtained its first sample from inside “John Klein” on Sol 182 – the 182nd Martian day since Curiosity arrived in Gale Crater, which equates to the period of the 8th/9th February on Earth.

The drilling operation, which cut a hole some 6.4cm (2.5 in) deep into the rock, collected around a tablespoon’s worth of material. In order to help avoid the risk of material from the surface of the rock, which has been affected by the environmental conditions on the surface of Mars, from contaminating drill samples, the actual sample gathering with the drill doesn’t commence until the bit is some 2 centimetres inside the rock. So in the case of “John Klein” the collected material comes from a depth of between two and five centimetres inside the bedrock layer.
The sample was gathered as cuttings from the drill’s boring into the rock were forced up into the drill bit shroud and delivered to one of two holding chambers (Chamber A in the diagram below) located in the head of the drill bit mechanism.

Following collection, the sample was used to initiate “cleaning” operations designed to remove microscopic Earth- based contaminants left within the drill as a result of its construction to prevent them unduly affecting any later analysis of sample material by CheMin and (particularly, given its sensitivity) SAM.
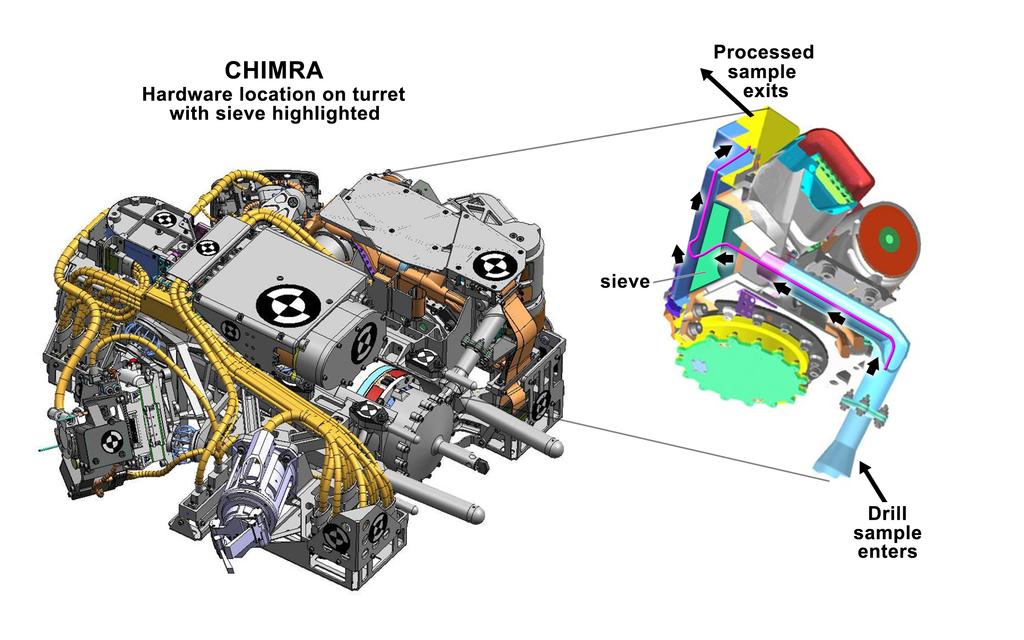
The first part of this “cleaning” work actually occurred during the drilling operation itself, due to the vibrations caused by the drill’s percussive (hammer) action agitating the material in the collection chamber, causing it to scour the chamber walls. Once drilling had been completed, and the robot arm returned to its stowed configuration, cleaning resumed, this time using the mechanical vibration system which forms a part of CHIMRA – the Collection and Handling for In-Situ Martian Rock Analysis system. This vibrates the entire turret at high speed, causing the gathered deposits to “swish” around the drill’s sample chambers so that friction created between the cuttings and the chamber walls would help scour the latter clean.
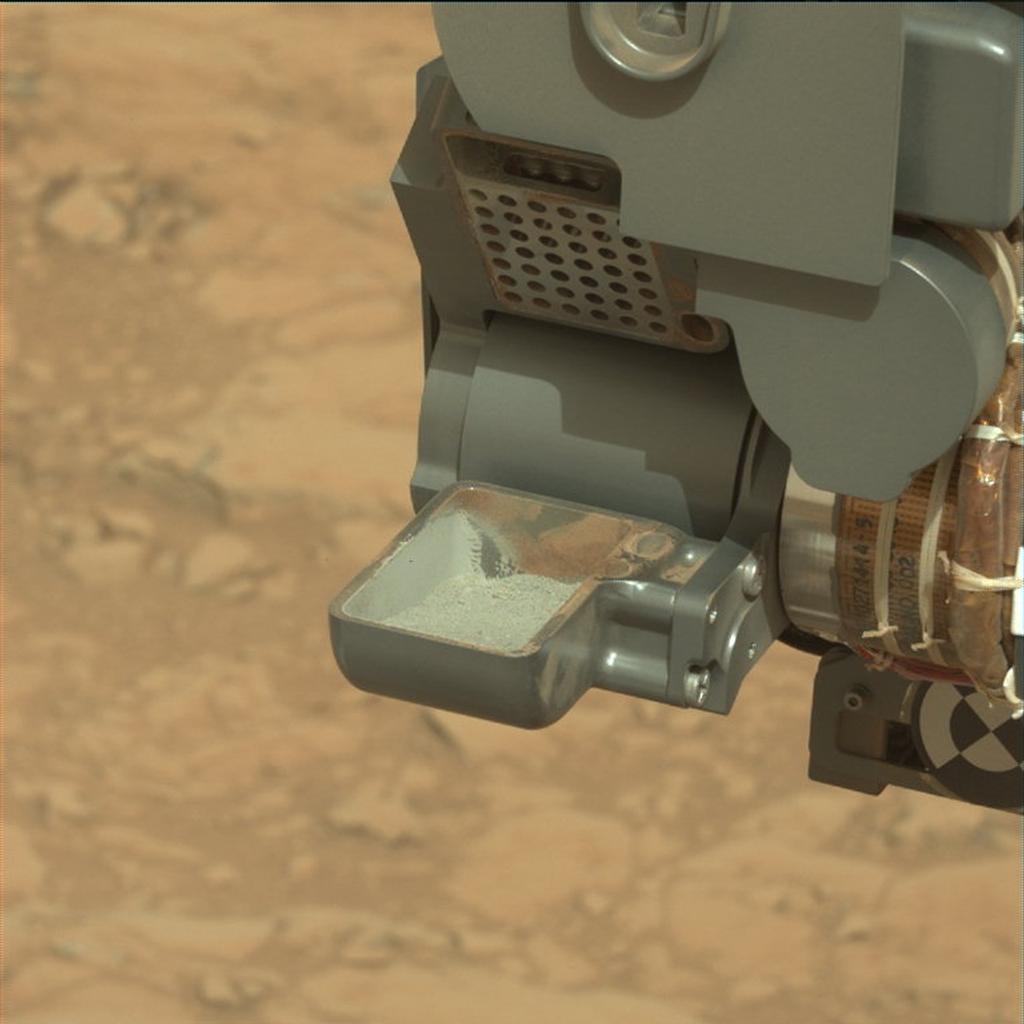
Part of this work was delayed after two software bugs were reported by the rover. While these were subsequently shown to be of no significant concern, they did result in a pause in cleaning operations while the software was evaluated Earthside for potential impact on operations. However, with initial cleaning work deemed to have been completed on Sol 193 (February 20th), the sample was transferred directly to the rover’s sample gathering scoop so that it could be imaged using Curiosity’s Mastcam, and visually analysed as to its suitability for onward processing through CHIMRA.
CHIMRA Processing
The next stage in the operation is to deliver the sample into CHIMRA itself, so that it can be graded and sieved in preparation for transfer to both CheMin and SAM. However, this activity as also contributed to a delay in processing as a result of an issue being identified within the CHIMRA mechanism itself.
CHIMRA uses mechanical vibration to pass material through a filter system designed to ensure only samples of an appropriate size are delivered to CheMin and SAM. During extensive testing on Earth, it has been discovered that the vibrations used to sieve samples may result in one of the filters in the system to become at least partially detached.
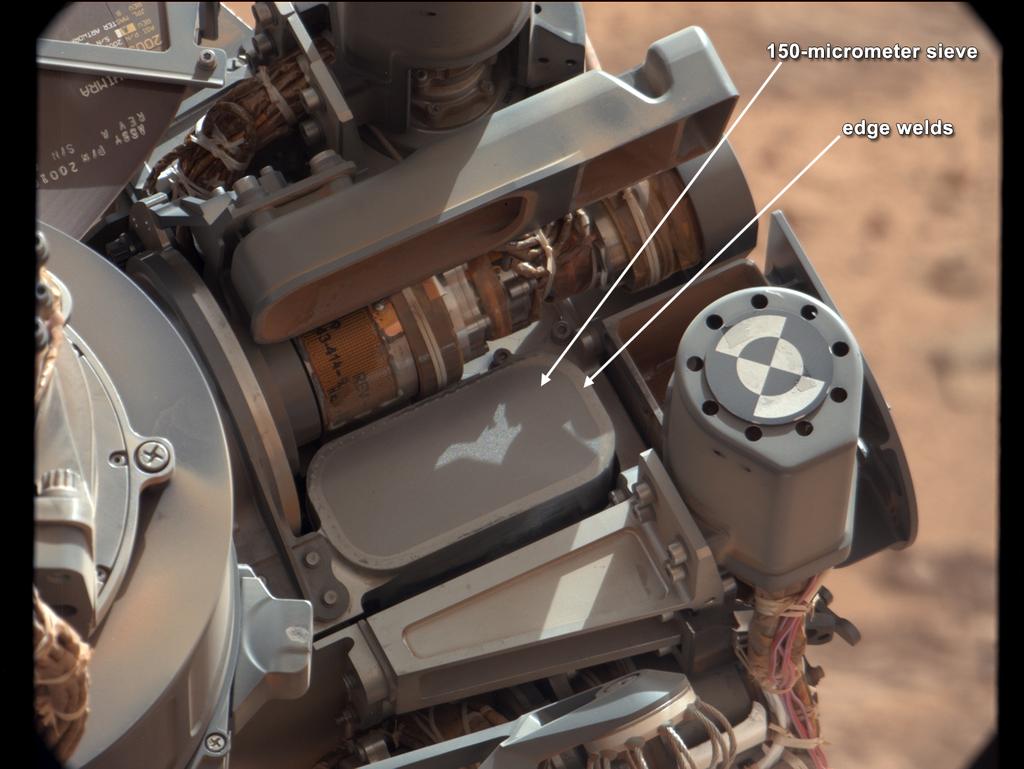
The 150-micron filter is essential to sample analysis operations aboard the rover, as it is the largest size of sample CheMin can accept (SAM can accept sample elements up to 1mm in size, although it also uses the 150-micron filter as well, and there is a redundant 1mm filter within CHIMRA specifically for SAM).
So far, the problem has only occurred in one of the two Earth-based CHIMRA test rigs, where repeated use of the vibration mechanism has resulted in an edge weld on the filter cover “unzipping”, causing the filter to become partially detached. While this is seen as something of a potential problem, mission engineers have laid emphasis on the facts that thus far, it has only occurred with one of the two test rigs, and the filter itself remains functional despite the issue; there is no sign of the second test rig exhibiting a similar issue at present. Furthermore, the problem has only manifested after both rigs have been subjected to rigourous testing far in excess of the initial two-year primary mission period, and well into any “extended mission” phase which may follow it.
Nevertheless, mission managers have responded with caution to the problem, introducing safeguards designed to reduce the stress placed on the filter welds by reducing the amount of mechanical vibrations used by CHIMRA when processing samples in preparation for delivery to CheMin and SAM, at least until such time as the causes of this one failure can be further identified and the risk to the mission better assessed.
Prior to this issue being confirmed, there had been some debate as to whether the sample from the initial drilling operation would in fact be passed to CheMin and SAM for analysis, or whether it would be used purely for clean purposes and then dumped, much as the initial soil samples gathered at “Rocknest” were dumped are being used to “clean” CHIMRA itself. However, and potential residual contaminants from the drill bit cleaning process notwithstanding, it has been decided that processed samples from this first drilling operation will be delivered to CheMin and SAM. However, this does not rule out further drilling activities at John Klein / within “Yellowknife Bay”; such additional operations will depend very much on the results of the forthcoming CheMin and SAM analyses.
As it stands, the CHIMRA processing of the sample was scheduled for a 20-minute period on either the 20th or 21st of February, with a further visual analysis of the sample via the Mastcam to confirm the suitability of the material for delivery to CheMin. After this, and possibly separated from it by a further day, some of the sample will be delivered to SAM. At the time of writing, NASA had yet to confirm whether these operations had taken place.
Work Perspective
While gathering a drill sampling may appear to be protracted, it is worthwhile pointing out that Curiosity has been carrying out a lot of other geology work while parked at “John Klein”.

While parked in the locations, Curiosity has completed an extensive investigation of the chemical and textural properties of the rocks in the area, which includes 25 analyses of rocks by the Alpha Particle X-ray Spectrometer (APXS) system mounted on the robot arm turret, more than 1,000 images from the Mars Hand Lens Imager (MAHLI), also mounted on the turret, and over 12,000 laser shots from the Chemistry and Camera instrument (ChemCam)., mounted atop the rover’s mast. Taken together, the data gathered from these activities continues to support the view that the Yellowknife Bay area was formed as a result of water / liquid action, rather than the much longer aeolian process of being laid down as a result of wind action.
The forthcoming analysis of the rock sample gathered as a result of this first drilling operation should add immeasurably to the mission’s understanding of the area.
All images courtesy of NASA/JPL
