 Curiosity has completed its first sample-gathering drilling operation on Mars.
Curiosity has completed its first sample-gathering drilling operation on Mars.
The news was confirmed in a NASA press release on February 9th (and in a Tweet “from” Curiosity itself!), with the actual sample gathering exercise taking place on Sol 182 of the mission ( February 8th/9th).
This marks the first time samples have been obtained from inside a Martian rock for analysis. Even so, it will be a while before any of the powdered material reaches the rover’s on-board science instruments.
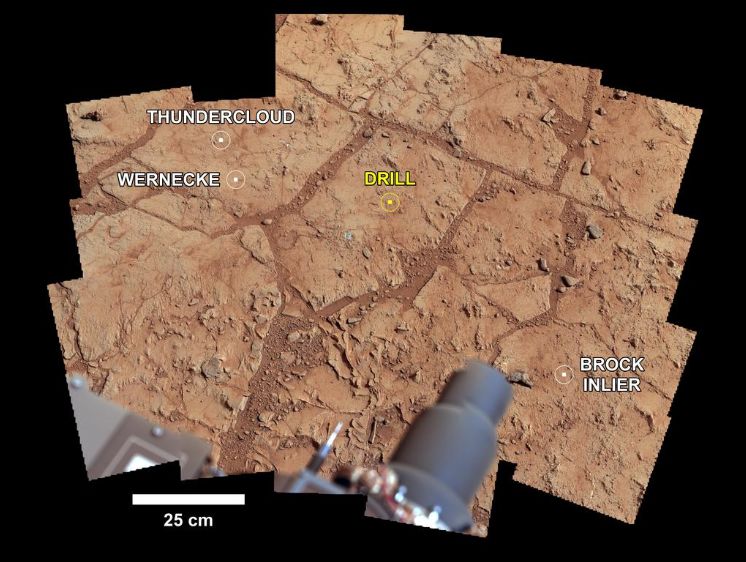
The boring operation took place a few centimetres from the “mini drill test” performed earlier in the week and which I reported on here, with the drill cutting some 6.4cm (2.5 inches) into the bedrock dubbed “John Klein”. This was deep enough for powdered cuttings to be pushed up behind the drill head and into the sample collection mechanism within the drill.
“We commanded the first full-depth drilling, and we believe we have collected sufficient material from the rock to meet our objectives of hardware cleaning and sample drop-off,” said Avi Okon, drill cognizant engineer at NASA’s Jet Propulsion Laboratory, following the operation.

Commenting on the achievement, NASA associate director for the agency’s Science Mission Directorate, and himself a former astronaut, John Grunsfeld said, “The most advanced planetary robot ever designed is now a fully operating analytical laboratory on Mars. This is the biggest milestone accomplishment for the Curiosity team since the sky-crane landing last August.”
Even so, it will be a while before any of the gathered sample will be transferred to Curiosity’s Chemical and Minerology (CheMin) and Sample Analysis at Mars (SAM) instruments. The sample is currently being held in a small sample collection chamber in the drill mechanism itself, which it reached after being “pushed” up flutes in the side of the drill bit. Some of the gathered material will now be used to scour traces of contaminants which may have been deposited onto the hardware while the rover was still on Earth, despite thorough cleaning before launch.
Please use the page numbers below to continue reading this article
