Sunday October 19th marked the culmination of what is regarded as one of the most unique astronomical events to take place in human history – so unique, some commentators believe it may only happen once every million years or so: the opportunity to study something which may have existed before the Earth was created.
For the last several months, comet Siding Spring has been under observation as it hurtles through the solar system at an acute angle relative to the plane of the ecliptic – the imaginary line along which the planets orbit, and on Sunday October 19th, it made its closest approach to Mars, passing just in front of the planet relative to the Sun.
Siding Spring was first identified by Australian astronomer Rob McNaught, and bears the name of his observatory as a result, although officially it is catalogued as C/2013 A1. Since then, it has been under observation from a veritable armada of international space craft, and its passage past Mars presents further unique opportunities for observation and data-gathering.
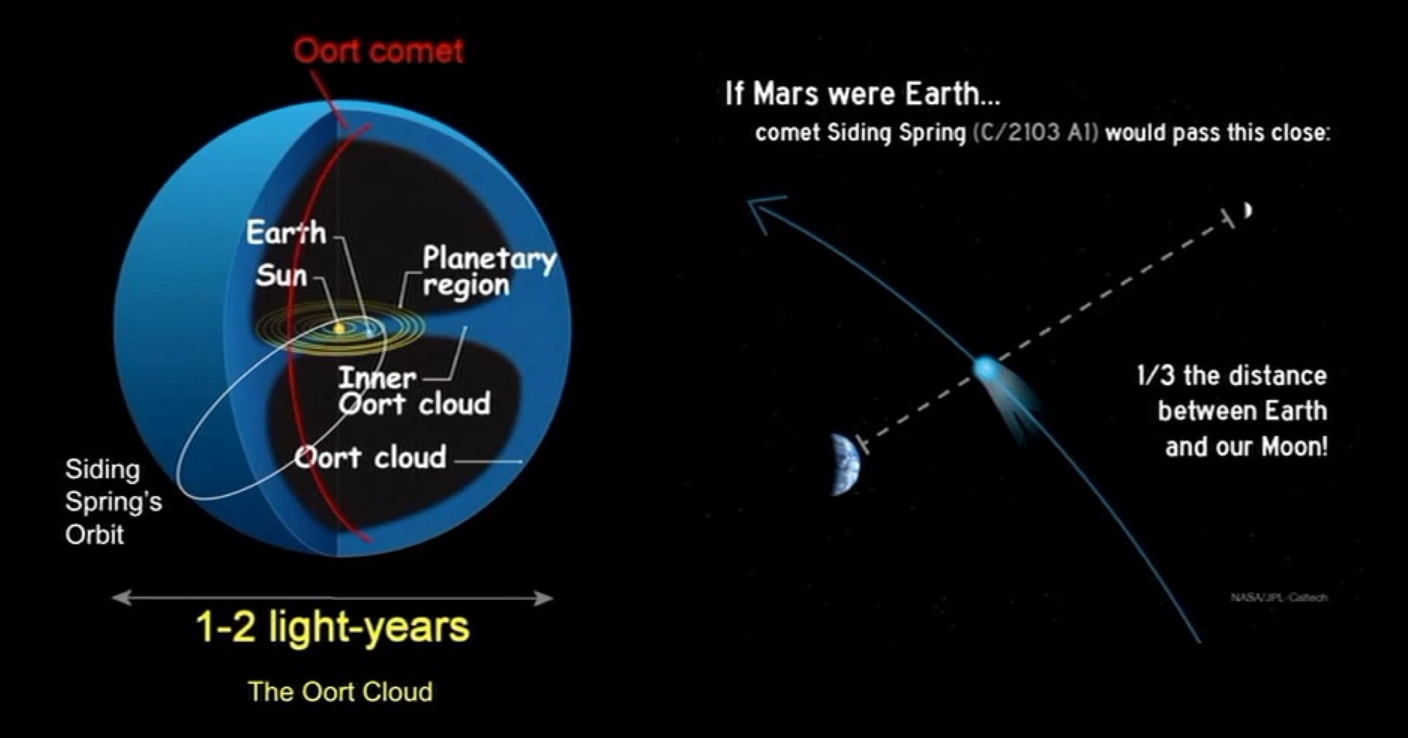
The comet has been identified as coming from the Oort cloud (or the Öpik–Oort cloud, to give proper recognition both astronomers who initially and independently postulated its existence). This is a spherical cloud of debris left-over from the creation of the solar system, occupying a huge area starting some 2,000-5,000 AU (2,000 to 5,000 times the distance from the Earth to the Sun) and extending out to around 50-100,000 AU – or about one light year away. Thus, Siding Spring represents some of the material “left-over” from the formation of the solar system 4.6 billion years ago – older than the Earth itself. In fact, such is the distance of the Oort cloud from the Sun, that some postulate the much of the material within it may actually come from stars which shared the same “stellar nursery” as the Sun.
There is nothing unique per se about comets coming from the Oort cloud – it is one of two places from which all comets originate, the other being the Kuiper belt (or Edgeworth–Kuiper belt, as it is also known in recognition of the two astronomers to postulate its existence in the form we now know it has). A disk of material also from the early history of the solar system, the Kuiper belt orbits the Sun at a distance of around 30-50 AU, and gives rise to “periodic” comets. These are comets which circle the Sun in periods of up to 200 years. Two of the most famous Kuiper belt comets are comet Halley, with it 76-year orbit, and comet Shoemaker-Levy 9, which broke-up during a close approach to Jupiter in 1992 prior to colliding with the gas giant in 1994.

What makes Siding Spring of interest to astronomers is that this is probably the first time in its long, cold history it has ever come inside the orbit of Jupiter since it was first nudged out of the Oort cloud. This led Dr Michael Brown, an astronomer at Monash University, to describe the comet as “essentially a refrigerator of pristine parts of the creation of the solar system. The particles it gives off are effectively opening up the door of the fridge so we can see what the solar system was like 4.6 billion years ago.”
John Grunsfeld, former astronaut and associate administrator for NASA’s Science Mission Directorate in Washington was equally enthused by the comet’s passage, referring to it as “a cosmic science gift that could potentially keep on giving.” Speaking at a press conference held earlier in the year to discuss NASA’s plans to observe Siding Spring, he continued, “The agency’s diverse science missions will be in full receive mode.” He went on, “This particular comet has never before entered the inner solar system, so it will provide a fresh source of clues to our solar system’s earliest days.”
The chance for scientific discovery notwithstanding, the comet’s path was initially a cause for concern, at least in terms of Mars’ future. Early attempts to track the comet’s likely route “up” through the solar system suggested that rather than passing the Red Planet, Siding Spring would in fact smash into it.
Had the comet struck, estimates suggest it would have created a crater between 10 and 15km in diameter, depending on the actual size of the comet’s nucleus, thought to be between 700m and 1km across. While that is certainly enough to result in quite an extraordinary bang and some severe changes in the Martian atmosphere (not to mention the sizable dent it would make in the planet’s surface), Mars has actually withstood much larger impacts in its time.
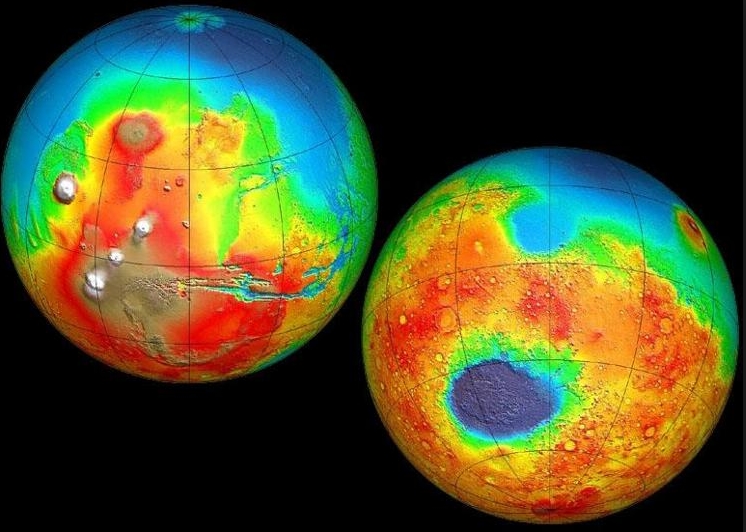
Take Hellas Basin, for example. It is the largest visible crater in the solar system, some 2,300km (1,440 miles) across, and with an ejecta ring some 7,000km (4,375 miles) across. It is believed to have been created by the impact of an asteroid some 400km (250 miles) in diameter.
As Grunsfeld noted, such is the scientific opportunity presented by the comet, that NASA has put a significant number of assets in the front line of tracking and observing Siding Spring. These include the Hubble Space Telescope, the Spitzer infra-red space telescope, the WISE infra-red space telescope, the Chandra X-ray observatory, the Kepler orbital observatory (used in the search for Earth-sized extra-solar planets) and more, as well a host of ground-based observatories.
Foremost in the front line, by dint of the comet’s close passage past Mars, are NASA’s orbital and surface vehicles there. Curiosity, Opportunity, the Mars Reconnaissance Orbiter (MRO), Mars Odyssey and MAVEN, together with Europe’s Mars Express and India’s MOM, are all watching the comet, although for the orbiting spacecraft, this comes with a degree of risk.