 August 5th marked the 2nd anniversary on Curiosity’s landing on Mars. The “landiversary”, as NASA dubbed the occasion, passed in something of a subdued manner in many respects, featuring a re-run of the August 2012 video reviewing the MSL’s arrival on Mars. Reviews of the mission from the perspective of two years on from that remarkable lading didn’t start-up until the days after the anniversary, with videos and lectures from members of the mission team.
August 5th marked the 2nd anniversary on Curiosity’s landing on Mars. The “landiversary”, as NASA dubbed the occasion, passed in something of a subdued manner in many respects, featuring a re-run of the August 2012 video reviewing the MSL’s arrival on Mars. Reviews of the mission from the perspective of two years on from that remarkable lading didn’t start-up until the days after the anniversary, with videos and lectures from members of the mission team.
One of the films which did appear, directly out of Caltech, rather than NASA’s Jet Propulsion Laboratory (which is located on Caltech’s Pasadena, California, campus), is Our Curiosity, a 6-minute celebration of Curiosity’s mission, and humanity’s drive to explore, to seek, to learn, and to understand, narrated by Felicia Day and the superb Neil DeGrasse Tyson.
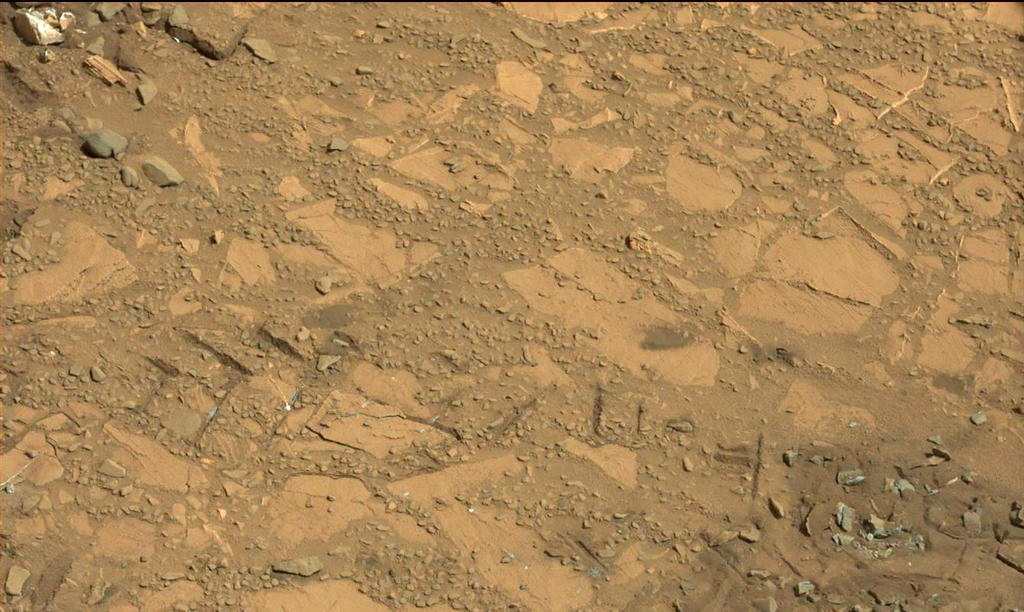
August 5th also marked my last MSL report, when Curiosity was some 3 kilometres from the lower slopes of “Mount Sharp”, the huge mound at the centre of Gale Crater, and the rover’s primary target for exploration. At that time, the rover had started to cross a region of chaotic terrain, marked by a rocky plateau cut by a series of sandy-bottomed valleys. The plateau itself proved to be littered with sharp-edges rocks and stones which had already caused some increase in the wear and tear being suffered by the rover’s wheels – albeit not as much as mission engineers had feared – by the time Curiosity had reached the edge of the nearest of the shallow valleys, which had been dubbed “Hidden Valley”.
The plan had been to use the valleys, where the sand would be less wearing on the rover’s aluminium wheels, to reach an exposed area of bedrook designated the “Pahrump Hills”, where Curiosity would engage in further rock sampling work prior to it continuing on to the “Murray Buttes”, the entry point for its ascent up the lower slopes of “Mount Sharp”.
However, rather than drive the one-tonne rover straight through the middle of the valley, where there are numerous dunes of potentially soft, wind-blown sand which might cause some difficulty traversing, the idea had been for Curiosity to skirt along the edge of the valley, where it was hoped the sand would be firmer and make for a better driving surface. Unfortunately, this proved not to be the case; as the rover proceeded along “Hidden Valley” it exhibited far more signs of wheel slippage than had been anticipated, giving rise to fears that it might get bogged-down in the sand were it to continue.

As a result, the rover reversed course, driving back out of the valley. In doing so, it crossed the rocky “ramp” it had used to originally enter the valley, and one of its wheels cracked the slab-like rock’s surface, revealing bright material within, possibly from mineral veins. The rock, dubbed “Bonanza King” showed similar signs of origin as “Pahrump Hills”, so a decision was made to examine it as a possible substitute drilling site.
“Geologically speaking, we can tie the Bonanza King rocks to those at “Pahrump Hills”. Studying them here will give us a head start in understanding how they fit into the bigger picture of Gale Crater and Mount Sharp,” said Curiosity Deputy Project Scientist Ashwin Vasavada, before continuing, “This rock has an appearance quite different from the sandstones we’ve been driving through for several months. The landscape is changing, and that’s worth checking out.”
By August 14th, 2014 (PDT, Sol 707 for Curiosity), the rover was positioned ready for possible sample-gathering from the rock. A new “compressed drilling plan” developed over the summer was employed to speed-up the various pre-drilling operations which have to be carried out (which include visually examining the rock, locating a suitable drilling-point, “cleaning” the surface area, and running a “mini drilling” operation). This compressed around a week’s worth of work into just a few days, such that by August 19th (Sol 712 for the rover), everything was set for the mini drilling operation, the final check prior to drilling for a sample.
“Mini drilling” operations are used to test a potential target for a range of factors prior to actually committing the rover’s drill to a sample-gathering exercise. These include testing how the drill interacts with the rock and how well it cuts into the rock, whether the tailings cut by the drill are suitable for gathering by the drill head’s sampling mechanism, whether the resistance of the rock to drilling might cause problems (e.g. the risk of damage to the drill or of excessive vibration), and so on.
In the case of “Bonanza King”, things did not go as planned, the slab exhibited signs of instability upon being struck by the drill head. As a result, on August 22nd, the mission team confirmed the rock had been deemed unsuitable for sustained drilling into its surface due to concerns it might shift and damage the drilling mechanism. Instead, sample gathering in the area has been abandoned and the plan is to resume the drive to “Mount Sharp”.
The time spent at “Bonanza King” gave the rover’s driving team time to evaluate driving through “Hidden Valley”. They came to the conclusion that it would be unwise to attempt a traverse through the valley on the basis of what had been encountered during the first attempt. A revised plan has now been drawn-up to take Curiosity across the rock-strewn plateau area of the region while attempting to minimise the risk of further damage to its wheels along the way.
“Flying Saucer” Test Yields Mixed Results
In June I wrote about NASA’s Low-Density Supersonic Decelerator (LDSD) “flying saucer”, a test rig for investigating new technologies which may help to deliver increasingly heavy payloads to the surface of Mars – a vital requirement ahead of possible human missions in the 2030s.
LDSD is intended to test two systems: an inflatable decelerator, which would form a part of a payload’s aeroshell, and a new parachute designed to operate at supersonic speeds.
The lightweight decelerator is designed to inflate after entry into the Martian atmosphere, increasing a payload surface area, and therefore the drag it creates through the atmosphere, helping to slow it down faster. The parachute is designed to deploy at much higher velocities than would normally be expected, again allowing the vehicle to slow to a point where other landing systems could be used.
Initial tests of the system, carried out using aircraft, had gone well. However, a test of the system designed to simulate the conditions it will encounter on Mars wasn’t 100% successful. As can be seen in the video below, while the decelerator worked well, the parachute didn’t. However, as the video also explains, even failures are valuable in the data they provide. Further tests are planned.
The Last ATV Arrives at the ISS
On August 12th, 2014, Georges Lemaître arrived at the International Space station. Officially referred to as ATV-5, the Automated Transfer Vehicle which is named for the Belgian Jesuit priest and physicist marks the final ATV resupply mission to the ISS.
In contrast to the high visibility Dragon missions to the ISS, the work of the ATV has been relatively low-key and often overlooked during the system’s six years of service, which is a shame, as the ATV is actually a remarkable spacecraft.
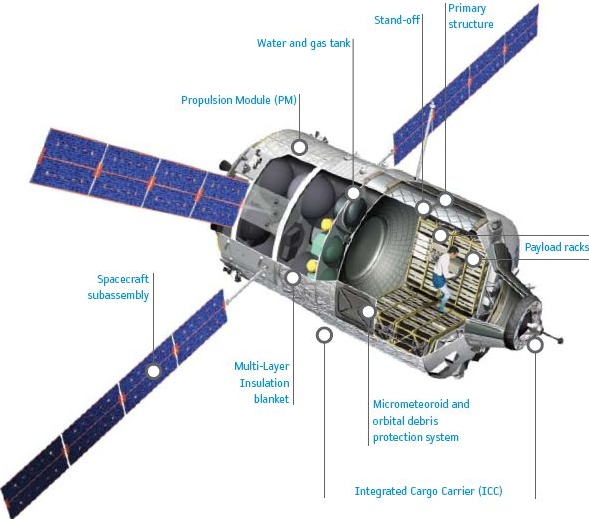
It is the largest vehicle next to the space shuttle so far flown to the space station, and has the largest resupply payload capacity of any current resupply vehicle; a total of eight metric tonnes, the majority of which can be carried in a 48m3 pressurised space. As well as all this, the ATV is capable of flying to, manoeuvring around, and docking with, the space station in an entirely automated manner, making it an extremely capable and flexible space vehicle.
Having arrived at the ISS on August 12th, Georges Lemaître will remain docked with the station until January 25th, 2015. During this time, it will be offloaded, and its motors used to “reboost” the station’s orbit to compensate for the small, but perceptible amounts of atmospheric drag the 100-tonne station encounters travelling through the thermosphere. Following the January 25th undocking, and laden with waste from the ISS, the ATV will de-orbit before burning-up as it enters the denser layers of the Earth’s atmosphere.

While none of the five ATVs flown to the ISS since 2008 have been capable of surviving entry into the Earth’s atmosphere for a possible landing, the system was actually designed for just that. In fact, it was designed for the possibility of a crew capsule being added at some point in the future, making it Europe’s first crewed space vehicle.
To this end, and following the ATV’s entry into service in 2008, the European Space Agency started work on progressing the cargo version of the ATV capable of a return to Earth and in developing the system as a manned transportation vehicle. Unfortunately, both feasibility projects were scrapped due to the gathering European financial crisis.

Instead, the ATV has been selected to form the Service Module section of NASA’s Orion Multi-Purpose Crew Vehicle (MPCV). The ATV-derived Service Module is seen to offer significant advantages over the original service module design proposed by Lockheed Martin, primary contractor for the Orion vehicle, as well as presenting NASA with a more cost-effective option for developing Orion’s service module.
The first Orion ATV module is scheduled to fly in 2017 as a part of the second uncrewed Orion mission. This will see an Orion command and service module combination fly around the Moon and back. It will be followed in 2021 by a crewed mission to rendezvous with an asteroid captured by automated means and placed in a lunar orbit.
In the meantime, the very first Orion launch, comprising just an unmanned crew module, will take place in December 2014.
All images and videos courtesy of NASA / JPL, unless otherwise stated
