 August 5th 2014 marked the second anniversary of Curiosity’s remarkable arrival on Mars, in what was dubbed by members of the mission team as the “seven minutes of terror”.
August 5th 2014 marked the second anniversary of Curiosity’s remarkable arrival on Mars, in what was dubbed by members of the mission team as the “seven minutes of terror”.
It was one of the most anticipated touch-downs of a remote vehicle on another planet in history, and was followed minute-by-minute the world over via the Internet, with people watching NASA TV, following events on Twitter and even witnessing them in “real-time” through the unique focus of NASA’s Eyes on the Solar System simulator website (you can still replay the landing on the simulator).
Since then, Curiosity has done much, including meeting its primary science goal to find evidence of environments which may once have been suitable for the nurturing of microbial life (Curiosity isn’t able to detect any evidence of microbial life, past or present itself as it has no direct means to identify organic compounds or minerals, that will be the role of the next rover mission, scheduled for 2020 – see later in this article).
Most recently, the rover has been approaching its main exploratory goal, the large mound at the centre of Gale Crater which has been dubbed “Mount Sharp” by NASA, having been “on the road” for almost a year, driving steadily south, with the occasional stop-over at various scientific points of interest.
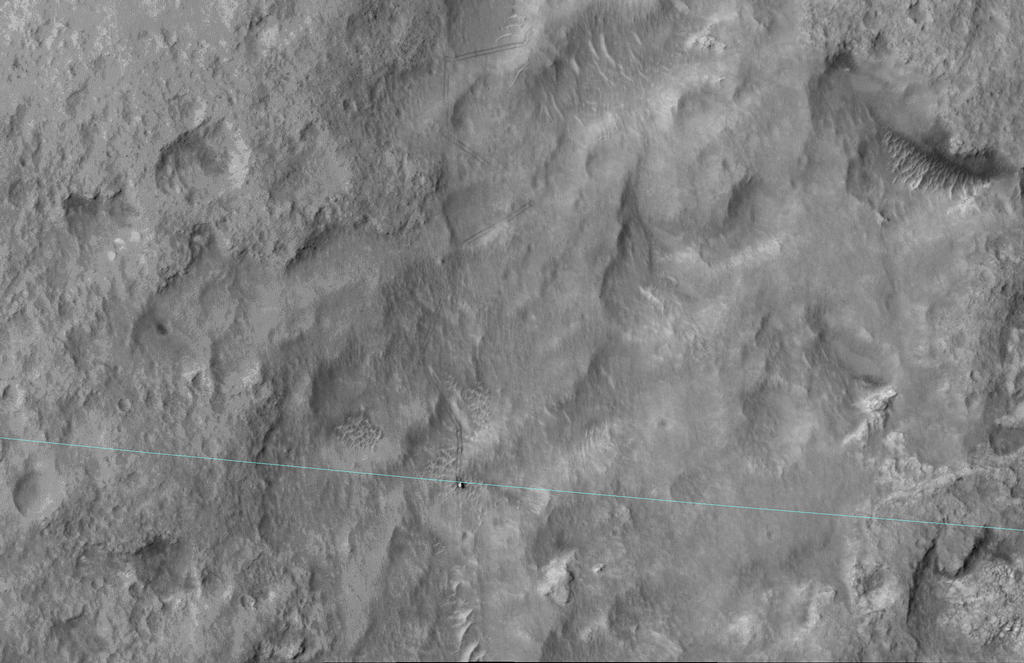
Since my last MSL update, Curiosity has achieved another mission mile stone and another mission first. On June 27th, the day of my last update, the rover trundled over the boundary line of its 3-sigma landing ellipse. Then on July 12th, it captured new images of its onboard laser firing.
As to the first of these events, I’ll let Guy Webster of NASA’s Jet Propulsion Laboratory explain.
“You must be wondering, ‘What the heck is a 3-sigma landing ellipse?’ It is a statistical prediction made prior to landing to determine how far from a targeted centre point the rover might land, given uncertainties such as the atmospheric conditions on landing day. The ‘3-sigma’ part means three standard deviations, so the rover was very, very likely (to about the 99.9-percent level) to land somewhere inside this ellipse. Such 3-sigma ellipses get a lot of scrutiny during landing-site selection because we don’t want anything dangerous for a landing – such as boulders of cliffs – inside the ellipse.”
In Curiosity’s case, the 3-sigma ellipse marked a relatively flat area on the floor of Gale Crater some 7 x 20 kilometres (4 x 12 miles) in size which was as close to the slopes of “Mount Sharp” as mission planners dare to bring the rover in for landing without risking it coming down in either chaotic terrain or on a slope where it might slide or topple over as the Skycrane set it down. The landing zone was also relatively close to the areas of geological interest which became known as “Glenelg” and “Yellowknife Bay”, and which the rover spent a good part of a year exploring – achieving its primary science goal in the process.
The Mars Reconnaissance Orbiter was overhead at the time the rover crossed this imaginary line in the sands of Mars, and captured the moment using its High Resolution Imaging Science Experiment (HiRISE) camera.
Sol 687 (July 12th, 2014 PDT) was the day on which the rover captured images of its laser firing on a rock dubbed “Nova”.
The laser, which is a part of the ChemCam system on mounted on the rover’s mast, is used to vaporise minute amounts of material on target rocks. Light from the resultant plasma is captured by ChemCam’s telescope for spectrographic analysis.
In all, the laser has been fired over 150,000 times in the two years since Curiosity arrived on Mars, and the results of firings have been seen in many “before and after” shots of rocks on the receiving end of a laser burst. What made this event special was that the burst firing at “Nova” was captured by the rover’s turret-mounted Mars Hand Lens Imager (MAHLI). This allowed NASA to produce a film showing the moment of impact of the laser shots.
In the first part of the film, the initial “spark” of a single laser pulse can be seen striking the surface of “Nova”. This is followed by an enhanced set of images showing the laser firing at 10 times a second, disrupting dust and minerals on the rock as the plasma cloud erupts.
“This is so exciting!” ChemCam Deputy Principal Investigator Sylvestre Maurice, of France’s National Centre for Scientific Research and the University of Toulouse, France, said of the film. “The ChemCam laser has fired more than 150,000 times on Mars, but this is the first time we see the plasma plume that is created.”
Explaining why the images had been captured, MAHLI Deputy Principal Investigator Aileen Yingst of the Planetary Science Institute, Tucson, Arizona, said, “One of the reasons we took these images is that they allow the ChemCam folks to compare the plume to those they imaged on Earth. Also, MAHLI has captured images of other activities of Curiosity, for documentation purposes, and this was an opportunity to document the laser in action.”
“What the new images add, is confirmation that the size and shape of the spark are what we anticipated under Martian conditions,” Sylvestre Maurice added.
Into The Unknown
Having crossed the imaginary 3-sigma ellipse boundary, Curiosity has in many ways entered into terra incognita, the ground it is now traversing, while studied via images taken from orbit, hasn’t been subject to quite the intense levels of scrutiny afforded the area within the landing ellipse. As a result, things have got a little rough as the rover has closed-in on the lower slopes of “Mount Sharp” (which is more correctly called Aeolis Mons).
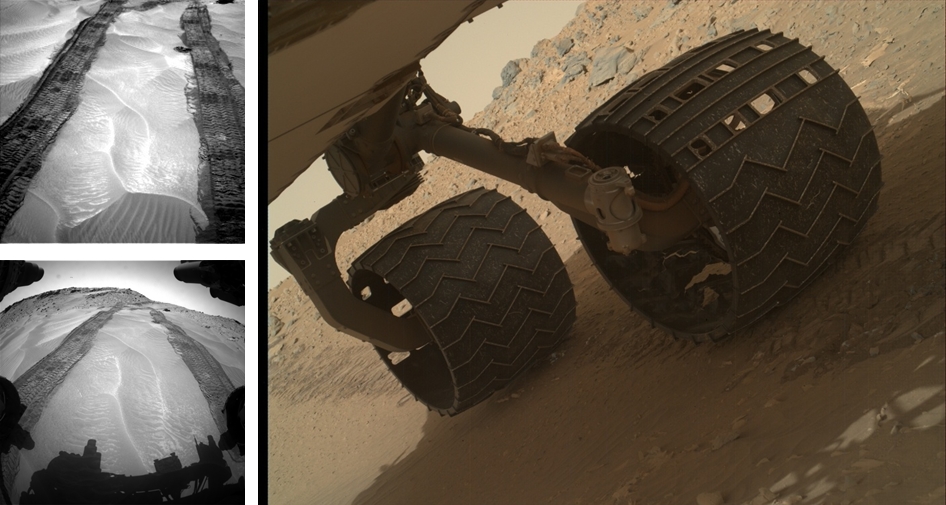
At the start of 2013, mission engineers were becoming increasingly concerned at the amount of wear and tear evidenced on the rover’s large aluminium wheels. While the damage in no way threatened the rover’s operational capabilities at the time, mission planners implemented a number of strategies to reduce the amount of damage being suffered by the wheels and lessen the potential for the rover’s driving capabilities being compromised once it starts climbing the slopes of “Mount Sharp”
One of these strategies was to take the rover southward via an alternative route, which in July required the rover to traverse the 200-metre wide “Zabriskie Plateau”, a flat outcrop of rock which forms part of the more chaotic terrain the rover must now cross. As it turned out, the plateau had far more in the way of sharp rocks than had been anticipated, prompting a cautious drive across it in order to minimise further damage to the wheels.
“The wheels took some damage getting across Zabriskie Plateau, but it’s less than I expected from the amount of hard, sharp rocks embedded there,” said JPL’s Jim Erickson, project manager for Curiosity, after the drive. “The rover drivers showed that they’re up to the task of getting around the really bad rocks. There will still be rough patches ahead. We didn’t imagine prior to landing that we would see this kind of challenge to the vehicle, but we’re handling it.”
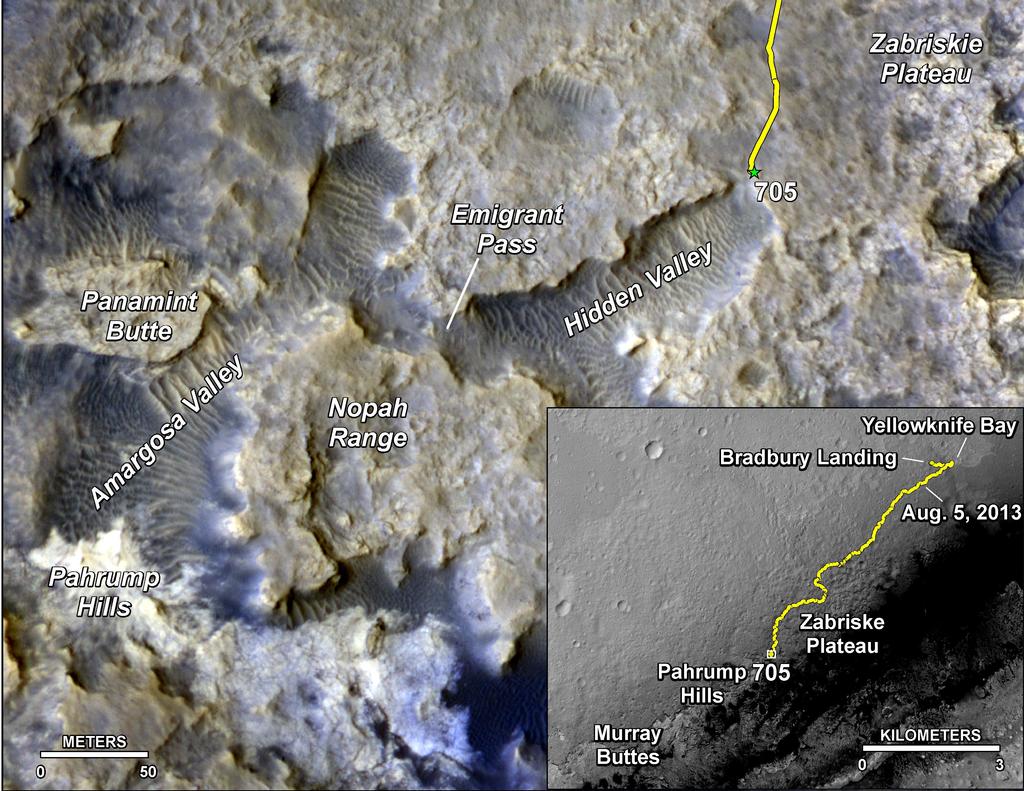
This chaotic terrain the rover is now entering comprises relatively flat areas of rocky terrain broken up by shallow, sandy valleys and gullies, and marks the start of an area of bedrock associated with “Mount Sharp” which is of interest to the science team. Curiosity’s 15-day traverse of the plateau brought it to the edge of one of these valleys which has been dubbed “Hidden Valley” by mission staff. The next port of call is liable to be an area of exposed bedrock which has been called the “Pahrump Hills”, which the rover is liable to reach via “Hidden Valley” and “Amargoosa Valley”.
Commenting on the region Curiosity is now entering, Project Scientist, John Grotzinger said, “We’re coming to our first taste of a geological unit that’s part of the base of the mountain rather than the floor of the crater. We will cross a major terrain boundary.”
More recently, the rover’s progress was halted at the start of August when the troublesome A-side computer experienced another hiccup. Curiosity has two identical computer systems, the A-side and the B-side computers. One of these functions as the “primary” system, which handles all of the processing required to operate the rover, and the other sitting as the back-up, waiting to take over should the primary experience problems.
This actually occurred in February 2013, when the A-side computer suffered a serious glitch in its main memory module. This prompted engineers to switch to using the B-side computer, with the troublesome A-side safely recovered, but remained in the back-up mode. However, at the start of August 2014, the A-side computer started giving unexpected returns, prompting a suspension of mission operations for two days while checks were carried out to ensure it was still fit-for-purpose as the rover’s back-up “brain”. Curiosity has since resumed normal operations.
Mars 2020
The next rover mission NASA will lead is still known under its project title of “Mars 2020”, and on July 31st 2014, the science package it will carry to Mars was announced by the US space agency.
The rover will utilise the same carriage, body and drive design as Curiosity, and will be delivered to the surface of Mars using the same Entry, Descent and Landing (EDL) technique and technology. It will carry a suite of seven primary instruments aimed at a range of science activities, including the potential to identify minerals and compounds of organic origin, and to help pave the way for human missions to Mars in the 2030s.

The seven main instruments the rover will carry are:
- Mastcam-Z, an advanced version of Curiosity’s As well as have panoramic / stereoscopic capabilities like the current Mastcam, this system will also be able to determine mineralogy of the Martian surface
- SuperCam, a joint US / French imaging and chemical / mineralogy analysis suite, which will be capable of detecting the presence of organic compounds in rocks and regolith from a distance
- Planetary Instrument for X-ray Lithochemistry (PIXL), a combined imaging / X-ray fluorescence spectrometer permitting more detailed detection and analysis of chemical elements than ever before
- Scanning Habitable Environments with Raman & Luminescence for Organics and Chemicals (SHERLOC), a spectrometer that will provide fine-scale imaging and uses an ultraviolet (UV) laser to determine fine-scale mineralogy and detect organic compounds
- The Mars Oxygen ISRU Experiment (MOXIE), an exploration technology investigation that will produce oxygen from Martian atmospheric carbon dioxide
- Mars Environmental Dynamics Analyzer (MEDA), a set of sensors that will provide measurements of temperature, wind speed and direction, pressure, relative humidity and dust size and shape, which will be supplied by Spain
- The Radar Imager for Mars’ Subsurface Experiment (RIMFAX), a ground-penetrating radar that will provide centimetre-scale resolution of the geologic structure of the subsurface, which will be supplied by Norway.
When it arrives on Mars, the Mars 2020 mission will be the second rover-based mission to Mars which will be able to directly search for signs of ancient Martian life, the first being the European Space Agency’s long-awaited ExoMars rover mission, which should land on Mars in 2018 as the second part of a two-part orbiter / rover mission.
Opportunity Takes the Record
I couldn’t close this report without mentioning Curiosity’s “little cousin”, the Mars Exploration Rover Opportunity. After a decade on Mars, “Oppy” also made a further entry in the record books, when it passed the 40 kilometre (25 mile) mark of distance travelled – farther than any other wheeled vehicle on another world.
Prior to “Oppy” topping the 40 kilometre mark, the record for the furthest distance travelled by a wheeled vehicle on another world was held by the Russian Lunokhod 2 rover, which covered around 37 kilometres (23 miles) on the Moon in four months during 1973, surviving the long lunar nights in the process. (Incidentally, Lunokhod 2 is also the only piece of space hardware on another world which is entirely privately owned. It was purchased for $68,500 at a Sotheby’s auction in 1993 by none other than computer games entrepreneur Richard Garriott, who is the son of NASA astronaut Owen Garriott (Skylab, Shuttle), and an astronaut in his own right, having flown to the ISS in 2008 as the 6th “tourist in space”.)
Opportunity reached its landmark distance on July 28th, 2014, as it continued to explore Endeavour Crater on Mars. Earlier in July, realising that they were close to breaking Lunokhod’s record, the MER mission team dubbed a small crater on Endeavour’s rim “Lunokhod 2” in honour of the Russian rover.

“The Lunokhod missions still stand as two signature accomplishments of what I think of as the first golden age of planetary exploration, the 1960s and ’70s,” said Steve Squyres, principal investigator for the MER mission. “We’re in a second golden age now, and what we’ve tried to do on Mars with Spirit and Opportunity has been very much inspired by the accomplishments of the Lunokhod team on the moon so many years ago. It has been a real honour to follow in their historical wheel tracks.”
Nor are the team resting on their laurels. If Opportunity is up for driving the distance of another marathon, mission scientists have already identified the rover’s next major investigation site, a valley region which appears to have several clay minerals exposed in close proximity to one another. Given the 42.2 kilometres (26.2 miles) separating it from “Oppy”, mission planners have dubbed the target “Marathon Valley”!
Related Links
All images and video courtesy of NASA JPL and Malin Space Science Systems.

Thanks Inara!!
LikeLike