The start of the year has brought – and is bringing – some changes to the Mars Science Laboratory mission. The first change has occurred here on Earth. On January 5th, 2015, John Grotzinger from the California Institute of Technology stepped down as the mission’s principal Project Scientist in overall charge of a team of some 500 people from across the globe who are operating the rover and its suite of scientific instruments.
The start of the year has brought – and is bringing – some changes to the Mars Science Laboratory mission. The first change has occurred here on Earth. On January 5th, 2015, John Grotzinger from the California Institute of Technology stepped down as the mission’s principal Project Scientist in overall charge of a team of some 500 people from across the globe who are operating the rover and its suite of scientific instruments.
Recently promoted to chair Caltech’s Division of Geological and Planetary Sciences, Grotzinger will still be involved in the mission, but his new responsibilities mean he cannot reasonably continue in such a lead role within the project. Stepping into his shoes, therefore, is Ashwin Vasavada of NASA’s Jet Propulsion Laboratory. He has been serving in the role of Deputy Project Scientist since the mission’s inception 2004, and has been intimately involved in both the development of the mission’s science packages and the rover itself. As such, he is ideally placed to take over from Grotzinger.
“John Grotzinger put his heart and soul into Curiosity for seven years, leaving a legacy of success and scientific achievement,” he said on taking over the role. “Now I look forward to continuing our expedition to Mars’ ancient past, with a healthy rover and a dedicated and passionate international team. And yes, this is all just incredibly cool.”

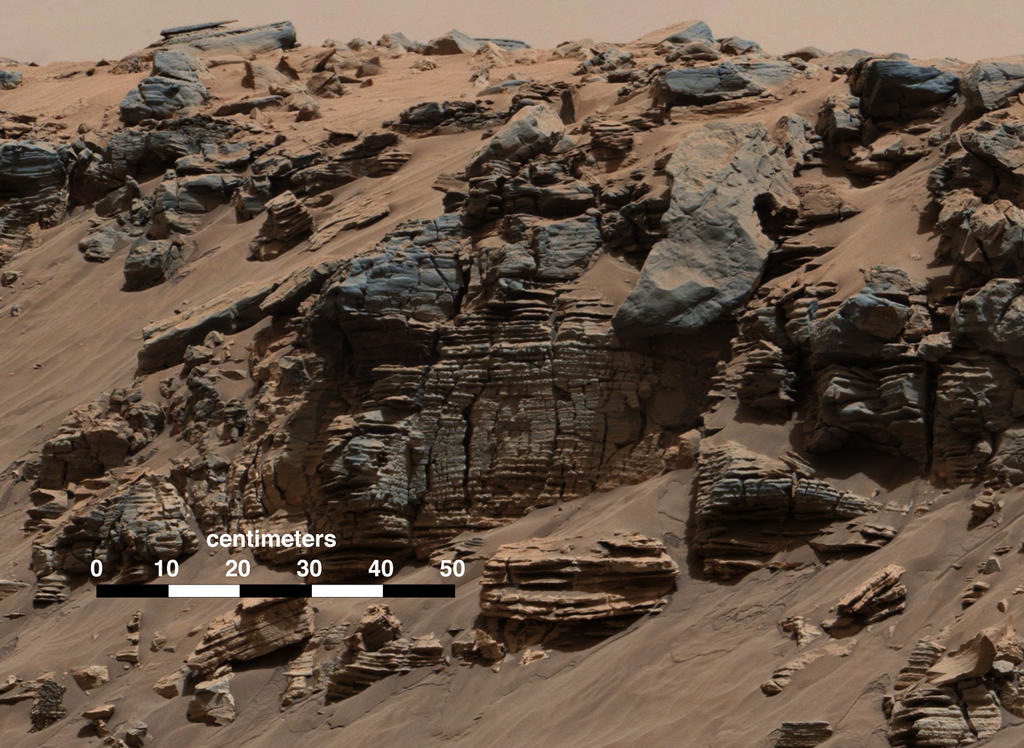
Meanwhile, on Mars, Curiosity is engaged in further studies of rocks within the “Pahrump Hills” area on the lower slopes of “Mount Sharp”. These studies will involve drilling for rock samples from at least one more target of interest, prior to the rover continuing its climb up the flank of the mountain.
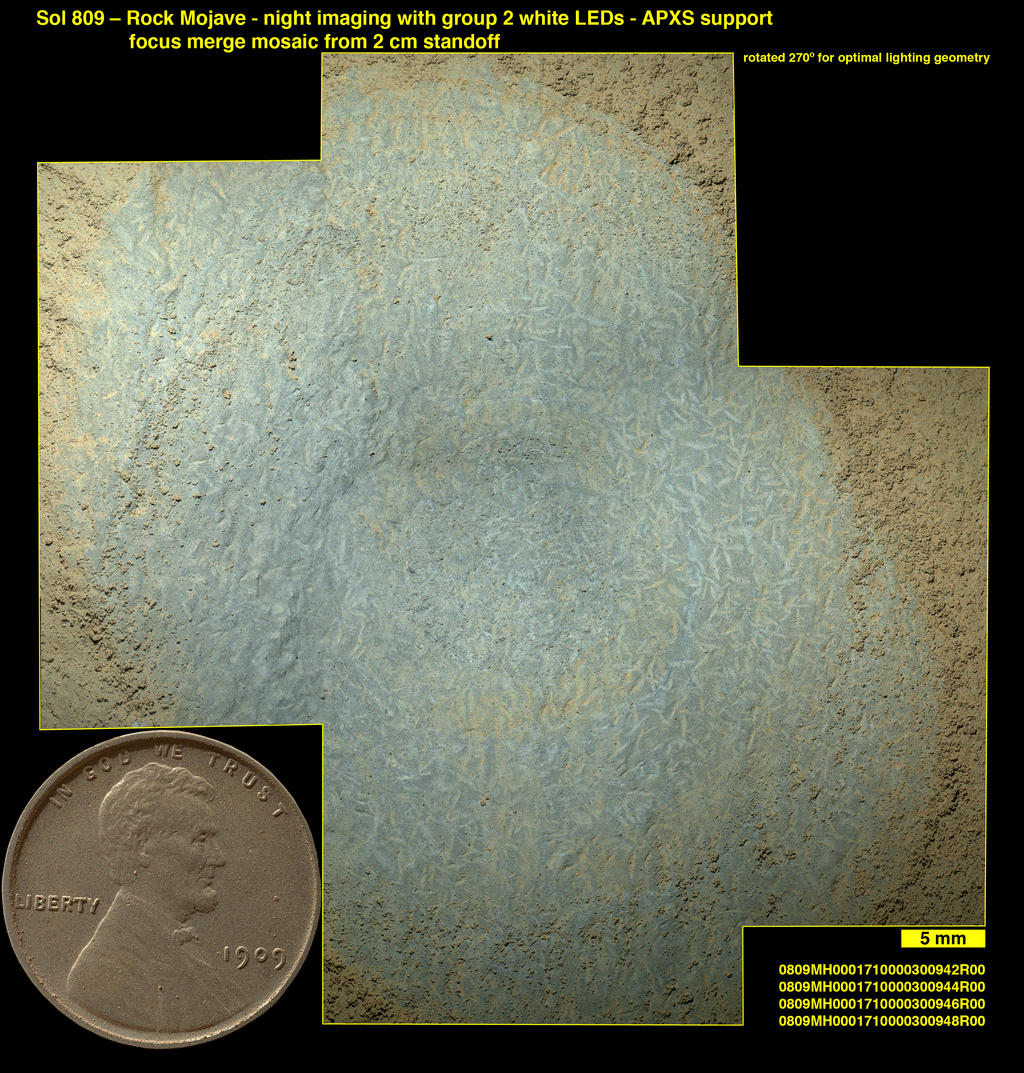
The initial target for sample gathering has been dubbed “Mojave”, which appears to be rich in crystalline minerals. Slightly smaller than grains of rice, the structures first appeared on early images of the rock captured by the rover, and have caused intense – no pun intended – curiosity among mission scientists.
“We don’t know what they represent,” Vasavada said of the mineral forms and the decision to target “Mojave” for drilling. “We’re hoping that mineral identifications we get from the rover’s laboratory will shed more light than we got from just the images and bulk chemistry.”
Prior to drilling for actual samples, Curiosity was first ordered to carry out a “mini drilling” operation. This is a routine test to ascertain a number of things prior to committing to a full-on sample gathering exercise. These include making sure the rock is stable enough for a full drilling operation, gathering data of the reaction of the drill to penetrating the rock surface, ensuring any drilling operation will not cause undue vibration within the rover’s mechanisms, and so on.

The initial mini-drilling operation took place on January 13th 2015, during the 867th Martian day, or Sol, of Curiosity’s work on Mars. It marks the third phase of science operations in the “Pahrump Hills” area, having been preceded by a “walkabout” of the area in which potential target sites for detail investigation were noted prior to follow-up examinations of several of them using some of the rover’s on-board systems, such as the Alpha Particle X-Ray Spectrometer and the Mars Hand Lens Imager (MAHLI), both of which are also mounted on the “hand” or turret at the end of the rover’s robot arm.
Once samples from “Mojave” have been collected, they’ll be passed through the CHIMRA system inside the turret, which will prepare them for delivery to the rover’s main on-board science suits, SAM and ChemMin. The latter (standing for Chemistry and Mineralogy instrument), will hopefully reveal a lot more about the chemical composition of the crystals. Additionally the drilling operation itself should reveal whether the crystals are only at the surface, like a salty crust, or are also deeper in the rock, which itself might lead to clues about their origins
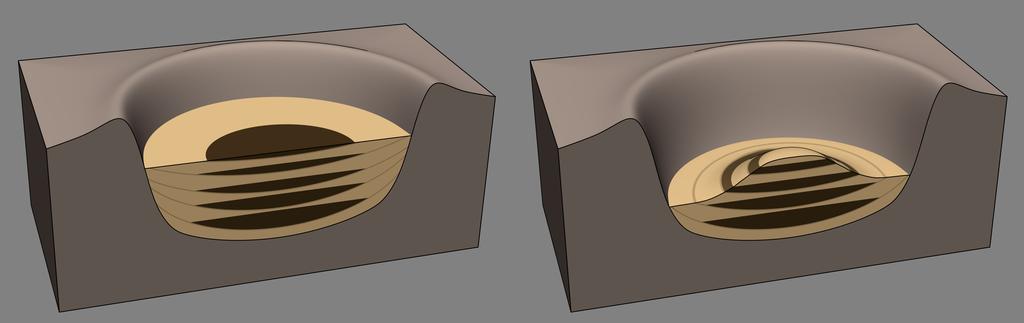
“There could be a fairly involved story here,” Vasavada said. “Are they salt crystals left from a drying lake? Or are they more pervasive through the rock, formed by fluids moving through the rock? In either case, a later fluid may have removed or replaced the original minerals with something else.”
Two other potential targets for drilling operations are also under consideration before the rover moves out of the “Pahrump Hills” area.
Continue reading “All change, getting virtual on Mars and watching the asteroid go by”