 The start of the year has brought – and is bringing – some changes to the Mars Science Laboratory mission. The first change has occurred here on Earth. On January 5th, 2015, John Grotzinger from the California Institute of Technology stepped down as the mission’s principal Project Scientist in overall charge of a team of some 500 people from across the globe who are operating the rover and its suite of scientific instruments.
The start of the year has brought – and is bringing – some changes to the Mars Science Laboratory mission. The first change has occurred here on Earth. On January 5th, 2015, John Grotzinger from the California Institute of Technology stepped down as the mission’s principal Project Scientist in overall charge of a team of some 500 people from across the globe who are operating the rover and its suite of scientific instruments.
Recently promoted to chair Caltech’s Division of Geological and Planetary Sciences, Grotzinger will still be involved in the mission, but his new responsibilities mean he cannot reasonably continue in such a lead role within the project. Stepping into his shoes, therefore, is Ashwin Vasavada of NASA’s Jet Propulsion Laboratory. He has been serving in the role of Deputy Project Scientist since the mission’s inception 2004, and has been intimately involved in both the development of the mission’s science packages and the rover itself. As such, he is ideally placed to take over from Grotzinger.
“John Grotzinger put his heart and soul into Curiosity for seven years, leaving a legacy of success and scientific achievement,” he said on taking over the role. “Now I look forward to continuing our expedition to Mars’ ancient past, with a healthy rover and a dedicated and passionate international team. And yes, this is all just incredibly cool.”

Meanwhile, on Mars, Curiosity is engaged in further studies of rocks within the “Pahrump Hills” area on the lower slopes of “Mount Sharp”. These studies will involve drilling for rock samples from at least one more target of interest, prior to the rover continuing its climb up the flank of the mountain.
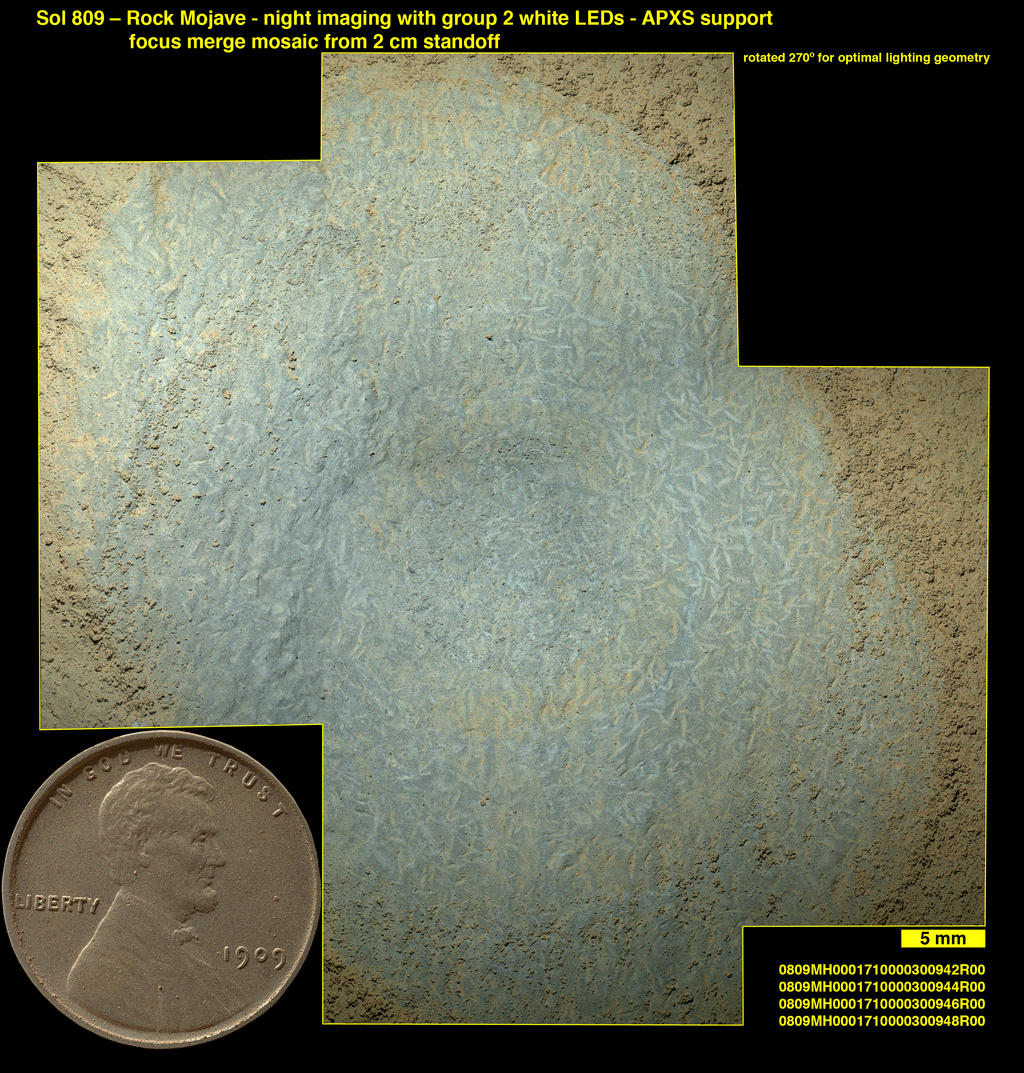
The initial target for sample gathering has been dubbed “Mojave”, which appears to be rich in crystalline minerals. Slightly smaller than grains of rice, the structures first appeared on early images of the rock captured by the rover, and have caused intense – no pun intended – curiosity among mission scientists.
“We don’t know what they represent,” Vasavada said of the mineral forms and the decision to target “Mojave” for drilling. “We’re hoping that mineral identifications we get from the rover’s laboratory will shed more light than we got from just the images and bulk chemistry.”
Prior to drilling for actual samples, Curiosity was first ordered to carry out a “mini drilling” operation. This is a routine test to ascertain a number of things prior to committing to a full-on sample gathering exercise. These include making sure the rock is stable enough for a full drilling operation, gathering data of the reaction of the drill to penetrating the rock surface, ensuring any drilling operation will not cause undue vibration within the rover’s mechanisms, and so on.

The initial mini-drilling operation took place on January 13th 2015, during the 867th Martian day, or Sol, of Curiosity’s work on Mars. It marks the third phase of science operations in the “Pahrump Hills” area, having been preceded by a “walkabout” of the area in which potential target sites for detail investigation were noted prior to follow-up examinations of several of them using some of the rover’s on-board systems, such as the Alpha Particle X-Ray Spectrometer and the Mars Hand Lens Imager (MAHLI), both of which are also mounted on the “hand” or turret at the end of the rover’s robot arm.
Once samples from “Mojave” have been collected, they’ll be passed through the CHIMRA system inside the turret, which will prepare them for delivery to the rover’s main on-board science suits, SAM and ChemMin. The latter (standing for Chemistry and Mineralogy instrument), will hopefully reveal a lot more about the chemical composition of the crystals. Additionally the drilling operation itself should reveal whether the crystals are only at the surface, like a salty crust, or are also deeper in the rock, which itself might lead to clues about their origins
“There could be a fairly involved story here,” Vasavada said. “Are they salt crystals left from a drying lake? Or are they more pervasive through the rock, formed by fluids moving through the rock? In either case, a later fluid may have removed or replaced the original minerals with something else.”
Two other potential targets for drilling operations are also under consideration before the rover moves out of the “Pahrump Hills” area.
The final New Year change for Curiosity takes the form of a further software revision. The required files for this have already been uploaded to the rover, and are due to be loaded into one of Curiosity’s two on-board computers, ready to take over vehicle operations. As with earlier updates, this new revision is designed to provide a range of improvements for the rover.
These include a new ability to use Curiosity’s Inertial Measurement Unit’s gyroscope to better sense any slippage which might occur during a drilling operation which might otherwise damage the rover’s sensitive drilling mechanism or potentially harm other systems within the robot arm’s turret.These updates come as a result of lessons learned from an earlier drilling attempt on a rock called “Bonanza King” showed it to be unstable and potentially damaging to the drill. The update will also add further improvements to the rover’s autonomous driving capabilities which should make further advances up the side of “Mount Sharp” more efficient.
Seeing Mars Virtually
Microsoft’s HoloLens, due to be part and parcel of Windows 10 when released, hit the headlines recently with some very mixed reactions – some seeing it as a further dip into the world of augment reality, and others quick to pooh-pooh it. For NASA, the press coverage allowed them to announce their work with Microsoft to develop a new software imaging suite called OnSight, developed in partnership with Microsoft and which leverages the HoloLens headset.
Developed by NASA’s Jet Propulsion Laboratory, OnSight allows 3D stereo images (which can already be captured by the Curiosity rover to create a 3-D simulation of the Martian environment. Using HoloLens headsets, scientists can then immerse themselves in the environment and “walk around” the rover’s location, examining rocks from different angles and under different lighting, allowing them to interact with surface elements in a more natural way. Using gestures, they may even be able to access menu commands, etc., which can then be used in the mission planning process and translated into instructions for later transmission to a rover.
What’s more, if headsets like the HoloLens prove popular, OnSight could allow the general public to share in the experience of “being on Mars”.

“We believe OnSight will enhance the ways in which we explore Mars and share that journey of exploration with the world,” said Jeff Norris, JPL’s OnSight project manager. “Previously, our Mars explorers have been stuck on one side of a computer screen. This tool gives them the ability to explore the rover’s surroundings much as an Earth geologist would do field work here on our planet.”
Current plans are for field testing with OnSight to commence with Curiosity later this year. The software will also likely see employment in the Mars 2020 mission and other Mars-related NASA activities and planning.
Taking a Helicopter Ride on Mars
We’re all become increasingly familiar with the use of UAVs – unmanned aerial vehicles – of all shapes and sizes in the world today. From military intelligence gathering and strike missions, through to delivering packages from your nearest Amazon warehouse, winged and rotary drones are become very much a part of our lives – so much so, that we can easily buy out own camera-carrying units from hobby and electronics shops and fly them around the garden.
In the future, we might even be flying them on other worlds.
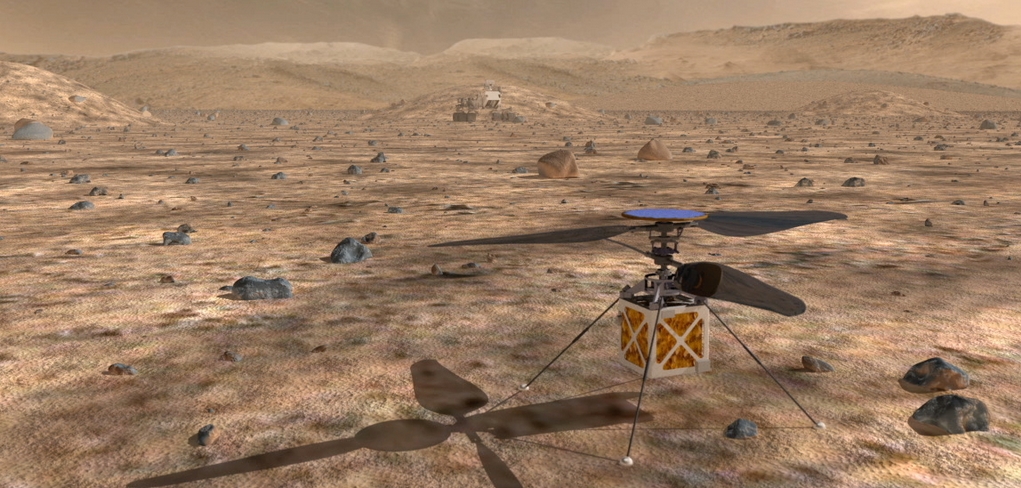
Weighing just one kilogramme (2.22 pounds), a rotor blade diameter of just over a metre (3.6 feet) and a payload around the size of a cubic box of tissues, the Mars Helicopter is a proposal under development to fly a small, lightweight drone alongside future rover missions. Capable of making short daily “hops” ahead of and around a “parent” rover, the camera-carrying helicopter would act as a set of “forward eyes” to help in planning rover activities, allowing mission planning to identify potential points of interest which might otherwise pass unnoticed as a rover trundles by a few dozen metres away.
It’s not the first time the idea of using airborne craft on Mars has been suggested; everything from balloons to airships to gliders to small powered ‘planes have been considered by NASA since around 1978, with the last options proposing a small aircraft could be flown to Mars in 2003, which would either be capable of either 30-minute or 3-hour flight / decent along a part of the 5,000 kilometre length of the Vallis Marineris in celebration of the 100th anniversary of the Wright Brother’s first flight.
Heaver-than-air flight on Mars is at best problematic with some intrinsic, and at times, contradictory, issues to overcome (how do you make a vehicle light enough that it can actually achieve flight in the tenuous atmosphere without making it so light it is subject to the vagaries of low-level wind forces on the planet, for example). However, as noted in the video below, NASA is working towards resolving the issues, and it is possible such a little helicopter might fly to Mars alongside the Mars 2020 rover – and might even help lay the foundations for the development and use of UAVs to support future human operations on Mars.
Asteroid Fly-by
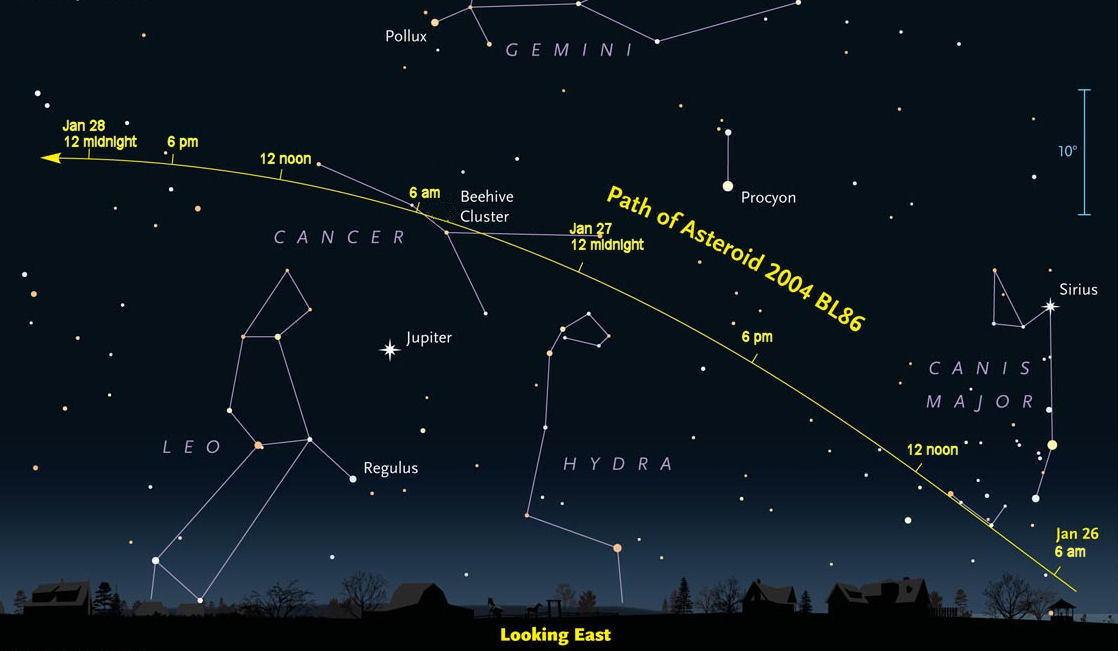
Monday, January 26th will see an asteroid, designated 2004 BL86, fly pass the Earth at about three times the distance of that of the Moon from Earth. Thought to be around 500 metres (800 feet) in diameter, it will be the closest approach to Earth of any known asteroid prior to 1999 AN10, which will past the Earth in 2027 at a distance roughly that equivalent to that of the Moon, some 390,000 kilometres (240,000 miles).
At the time of its closest approach on January 26, the asteroid will be approximately 1.2 million kilometres (745,000 miles) from Earth and should be observable to amateur astronomers with small telescopes and strong binoculars.
If you can’t gain access to a telescope or binoculars, or your skies are too cloudy, you can watch the asteroid approach live online. Slooh, the live online observatory, will broadcast the event starting at 16:00 GMT on Monday, January 26th.
All images and video, unless otherwise noted, courtesy of NASA JPL.
