A time-lapse video of the SpaceX CRS-19 cargo Dragon being captured by the Canadarm-2 of the International Space Station (ISS)
The past week has seen two resupply missions launched to the International Space Station (ISS), which between them will deliver 4.6 tonnes of supplies and equipment to the station, including some special visitors.
The first mission, CRS-19, featuring a SpaceX Dragon and Falcon 9 launch vehicle, lifted-off from Cape Canaveral Air Force Station (adjacent to the Kennedy Space Centre) on Thursday, December 5th, after being delayed 25 hours due to high winds over the launch site. It rendezvoused with the ISS at 10:05 GMT on Sunday, December 8th. The second mission features a Russian Progress resupply vehicle, which lifted off from the Baikonur Cosmodrome in Kazakhstan at 09:34 GMT on Friday, December 6th, and is due to dock at the ISS on Monday, December 9th, carrying a mix of food, fuel and supplies.
However, it is the Dragon vehicle that has captured most attention, due to its cargo. As well as carrying the traditional Christmas goodies for the ISS crew, CRS-19 carried 40 passengers in the form of mice and elements of the station’s increasing use of robots.
The mice will spend a month aboard the ISS as a part of research into two of the most debilitating effects of spending extended periods in micro-gravity environments such as orbiting the Earth or something like a 6-month flight to Mars: muscle and bone mass loss.
Several of the mice have been dubbed “mighty mice” on account of their being genetically engineered by scientists at the Jackson Laboratory for Genomic Medicine (JAX-GM) in Maine, USA. Specifically, they have been engineered to inhibit myostatin, a molecule that occurs in mammals that regulates muscle growth (discovered in 1997 by Dr. Se-Jin Lee), allowing them to develop increased muscle mass compared to ordinary mice.

The idea is that by inhibiting the myostatin, the mice will be able to maintain both muscle mass and limit bone calcium loss whilst at the station, the lack of myostatin allowing them to continue to convert protein into muscle mass despite the mice being less active on the station than the would be on Earth.
They will spend their time on the ISS with a group of mice that have not had their myostatin blocked, and with two similar group sof enhanced / non-enhanced mice on Earth, to determine the overall impact of the lack of myostatin in the production / maintenance of muscle bone mass in micro-gravity compared to how myostatin might contribute to muscle / bone mass loss when allowed to function normally.
As well as helping determine what medical / genetic assistance can be given to humans on long duration, low-gravity space missions (possibly alleviating the need for up to 4 hours a day to be spent in exercise to counter muscle / bone mass loss), it is hoped that controlling / inhibiting myostatin’s function could be used to help treat patients recovering from hip fracture surgery, or those in intensive care where muscle growth could be a major factor in their recovery, and to assist elderly people suffering from muscle loss or osteoporosis.
CIMON Returns to the ISS
In addition to the mighty mice, the CRS-19 mission also delivered CIMON-2 (“Simon-2”), an updated versions of a robot assistant for ISS crews. Developed by Germany’s DLR CIMON (Crew Interactive Mobile CompaniON) is a medicine-sized robot that can float around the ISS using 14 small fans boasting a combination of IBM Watson AI, cloud connectivity, and neural network training. It was first flown aboard the ISS in 2017 / 2018, and is capable of assisting with routine tasks and research projects, displaying instructions on its forward screen, and recording images. It can also recognise, learn from, and bond with crew members through natural language; offer creative solutions to tricky challenges; and even serve as a security guard, noticing potential problems before they become dangerous.
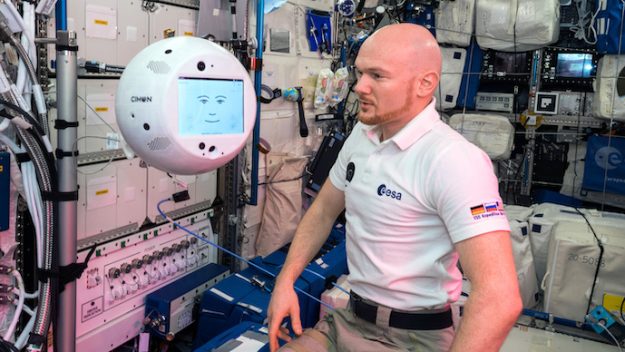
Unfortunately, the first outing for CIMON didn’t entirely go according to plan, in an outing with ESA astronaut Alexander Gerst, things started out well enough, with CIMON helping Gerst complete some test tasks, but problems arose when Gerst asked it to play his favourite music. Selecting Man Machine by Kraftwerk, CIMON continued to play the music while accepting other tasks, and when Gerst ordered, “Cancel music” the robot to replied, “I love music you can dance to! Alright, favourite hits incoming.”
While CIMON could still comprehend other commands, it appeared to become confused and not a little stroppy as Gerst communicated with those monitoring the test. “Be nice, please,” it requested at one point, followed a little later by, “Don’t you like it here with me?” and “Don’t be so mean.”
The improved CIMON-2 comes with more sensitive microphones that will hopefully allow it to hear better and not confuse commands, and a more robust AI system to allow it to better understand when it is being addressed and when an astronaut might be talking to someone else. This improved AI system includes IBM Watson Tone Analyser technology, which uses linguistic analysis to detect emotion in the tone of a conversation and respond to it – which given CIMON’s own moodiness noted above, could be interesting!
CIMON-2 is expected to spend up to three years aboard the ISS. As well as serving as a test bed for easing the stress of living and working in limited environments like the ISS and in developing greater understanding of how robots and AI can function to support crews on long duration missions, CIMON-2 is also potentially a stepping stone for developing the necessary trust human crews require to make the routine use of such systems – which can record, process and store human activities, interactions and moods, raising concerns of privacy and data security – acceptable to crew.
Dextre, RELL and and the “Robot Hotel”

Robots are an important part of future human space activities, and over the years, a number of systems have been employed or tested aboard the ISS, for working both inside and outside the station. The most obvious of these is the Canadarm-2 remote manipulator system used outside of the ISS, while inside the ISS there have been robot system like CIMON and FYODOR (see: Space Sunday: Lunar landers, and robots in space).
Two critical robot used outside the station are Dextre (also called the Special Purpose Dexterous Manipulator or SPDM) and RELL, the Robotic External Leak Locator, and both are affected by the arrival of the CRS-19 resupply mission.

Dextre is a highly-capable robotic system first delivered to the ISS in 2008. Resembling 3.5m long human torso mounting two 3.5m long and extremely agile arms capable of each using a range of tools attached to their “fingers”, Dextre can carry out a wide range of tasks outside of the ISS from repairs and maintenance through to unloading and moving cargo delivered to the station and mounted external on resupply vehicles without the need for astronauts to make a space walk. It can move up and down the station on a railed platform, or can be attached attached to the Canadarm-2 and operated from there.
RELL is a small robotic “sniffer” tool that can be used by Dextre. The ISS relies on an extensive cooling system circulating ammonia through a complex system of external pumps, reservoirs and radiators on station to cool its complex life support systems, spacecraft equipment and science experiments. The system can be subjected to leaks – such as resulting from a micro meteoroid impact.
When attached to Dextre, RELL can detect such leaks and guide Dextre (generally attached to the Canadarm-2 for this work) to the leak to effect repairs, which RELL can then “sniff” to confirm the leak has been sealed. Two RELL units are carried aboard the ISS – one stored outside the station, and one inside as a back-up. However, thanks to a CRS-19, they, and other Dextre tools will be getting a new home: a “robot hotel”.

The Robotics Tool Stowage, or RiTS is a unit designed to provide a “home” for a range of robotic tools used by Dextre, allowing it to easily locate and attach them as they are needed, much like a workman uses a tool belt, and then return them when done.
For each of its stored tools, RiTS will provide heat and physical protection from radiation and micro meteoroids. Its thermal system maintains ideal temperatures for the instruments, helping them stay functional.
– Mark Neuman, RiTS hardware manager
A space walk will be carried out to mount RiTS on the main platform that moves Dextre up and down the external rails of the station, and will initially be used to house both of the RELL units. Additional tools will be added to the RiTS once it is verified for operational use.
ESA Uses the ISS for Lunar-Related Robotic Tests
November 2019 saw another type of rover tested from the ISS, when ESA astronaut Luca Parmitano aboard the station took command of a rover vehicle on Earth in an exercise to demonstrate the feasibility of tele-operating remote vehicles from orbital facilities.
Such capabilities are seen an indispensable as a part of human operations on the Moon and Mars, allowing crews in orbit to carry out a range of operations either separately from any human presence on the surface (or even in advance of human surface operations). However, they require a robust communications system and some form of feedback system to give vehicle operators an indication of things like grip, exerted pressure, etc., when handling samples, equipment and tools.
The tests involved Parmitano on the ISS to take control of an analogue rover (called Analog-1) located in a test environment in a warehouse in the Netherlands, and formed part of ESA’s Multi-Purpose End-To-End Robotic Operation Network (METERON) programme. In the first test on November 18th, Parmitano guided the rover through an obstacle course to test the responsiveness of the rover with commands transferred over great distances. In the second, on November 25th the astronaut had to guide the rover through a small simulated lunar environment to collect rock samples, thus testing the ability of a remotely-operated rover to conduct geological surveys on alien worlds. Both were carried out with Parmitano controlling the rover 10,000 km away while orbiting Earth at a speed of 8 km/s (28,800 km/h).

Using a force-feedback system and a pair of cameras on the rover, Parmitano was able to drive the vehicle – called Analog-1 – and then select rocks from three sample sites under the guidance of a team of geologists in Germany. The feedback system allowed him to judge the rover’s manoeuvring and the amount of pressure the sample claw was applying to samples when picking them up. Continuous communications between the ISS and the rover were achieved by relaying information between ISS and rover through relay satellites, with the cameras – mounted on the rover and on its robot arm – allowing Parmitano detailed views of the rover’s location and the samples he commanded it to collect.
The METERON project is to be extended in 2020 with more detailed and extensive simulations designed to imitate operating rovers on the Moon from lunar orbit. These will take place in lunar analogue locations such as Mount Etna, Sicily.
