
On Friday, September 6th, India was due to become the fourth country to successfully reach the surface of the Moon, with the touch-down of the Vikram lander, part of the Chandrayaan-2 (“moon craft-2” in Hindi) mission.
Launched in late July 2019, Chandrayaan-2 was set to be the latest in a series of high-profile missions undertaken by the Indian Space Research Organisation (ISRO) over the course of the last 11 years, which have included the Chandrayaan-1 lunar orbiter (2008/2009) and the Mangalayaan (“Mars-craft”), launched in 2013 and still operational today.
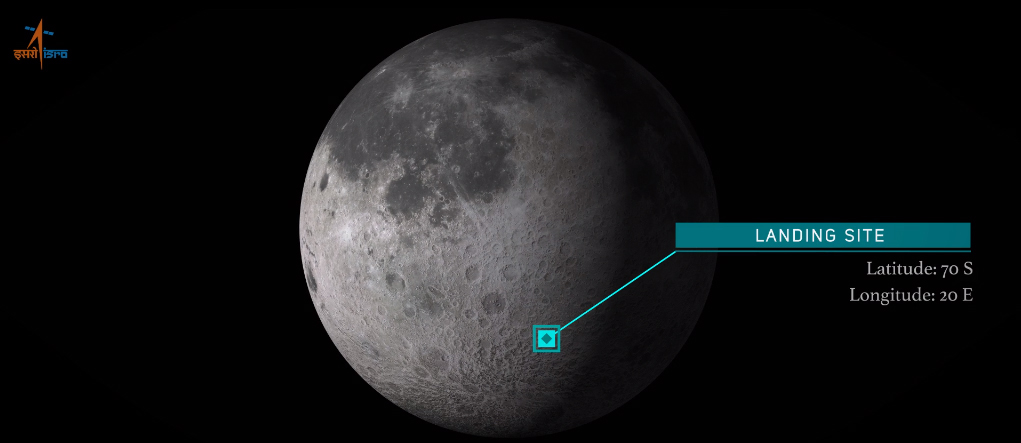
As I’ve noted in recent Space Sunday articles, Chandrayaan-2 comprises three parts: the orbiter vehicle, the Vikram lander and a small rover called Pragyan (“Wisdom” in Hindi) carried by the lander. Vikram departed the orbiter vehicle on Monday, September 2nd, allowing it to begin a series of manoeuvres in readiness for a final decent and landing, scheduled for Friday, September 6th (western time, the early hours of Saturday, September 7th for India) in the Moon’s South polar region.

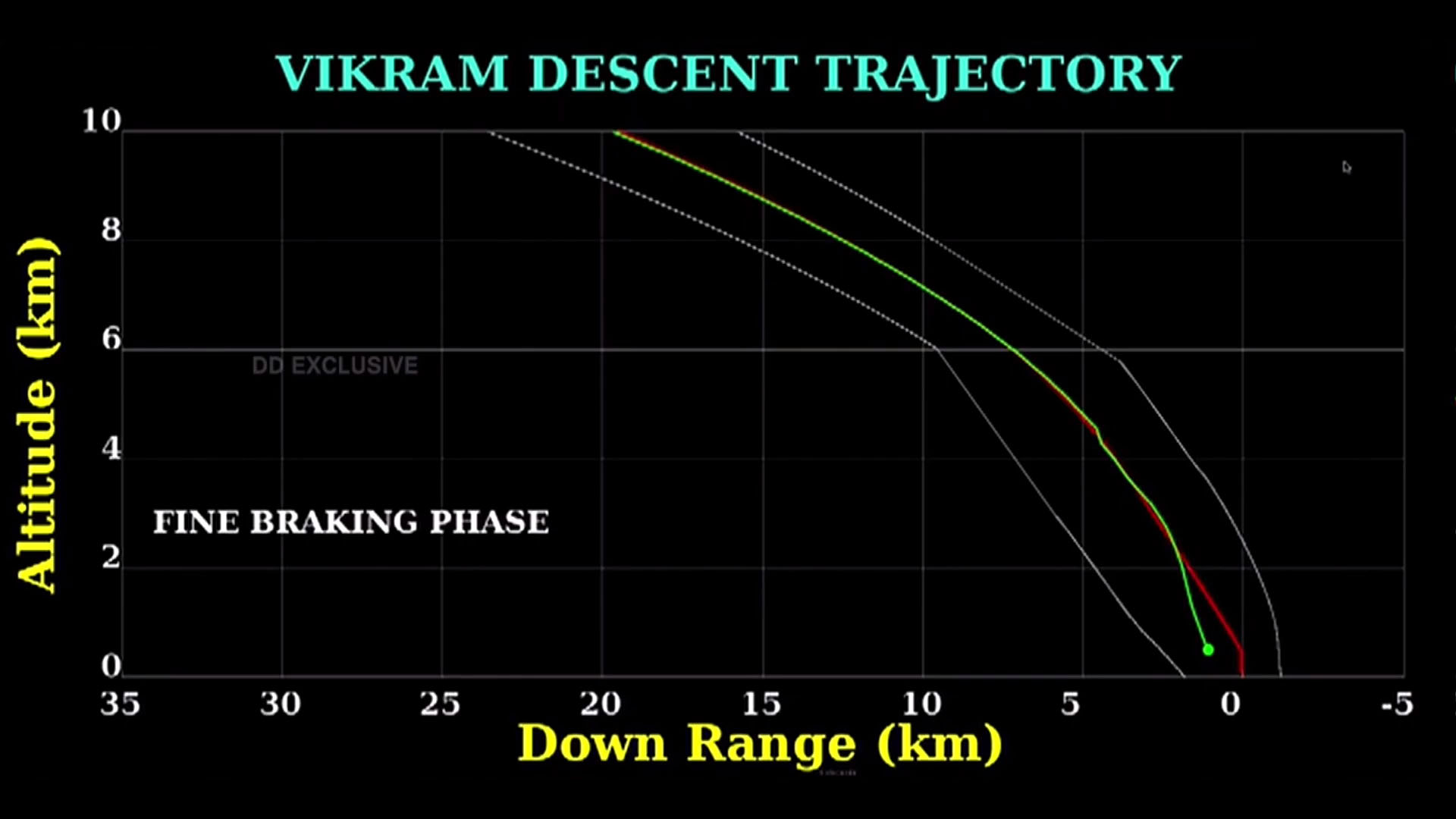
Initially, that final descent started well enough, with the lander about 550 km (344 mi) from the south pole as it fired its descent motor start the start of its final approach. At an altitude of 6 km (3.75 mi), it started a final sequence of engine burns referred to as the “fine braking phase”. Then all communications ceased.
ISRO issued a statement that the vehicle was performing nominally until around 2.1 km above the Moon, when the loss of communications occurred. However, images of the data received from the vehicle and released by ISRO appeared to suggest telemetry was being received when the lander was within 400 m of the lunar surface – and altitude at which it would be fully under its automatic guidance and landing software, and not reliant on commands from Earth. This seemed to suggest Vikram may have made a landing.
This idea gained ground as this article was being prepared, when an article published by Asia News international suggested Vikram has been spotted on the surface of the Moon, possibly 500m to 1 kilometre from its designated landing point. The article quotes ISRO’s director, Kailasavadivoo Sivan as saying:
We’ve found the location of Vikram Lander on lunar surface & orbiter has clicked a thermal image of Lander. But there is no communication yet. We are trying to have contact. It will be communicated soon.
Since then, the report has been repeated numerous times through various media (including an entirely UNofficial and unverified “ISRO Official Update” Twitter account) without (at the time of publication) official confirmation. This has made it hard to determine the veracity of the ANI report. Hopefully, the situation will become clearer in the coming days. One thing that could help define the lander’s condition would be an image captured by Chandrayaan-2’s main imaging camera. With a resolution of a third of a metre, it is the highest resolution camera in operation around the Moon.
But even though the lander and rover may have been lost, the mission is far from over; the orbiter continues to function perfectly. It also carries the bulk of the mission’s science experiments – eight of the 13 carried by the mission. he data gathered by these systems should enable scientists to compile detailed maps of the lunar surface, revealing key insights about the Moon’s elemental composition, formation and evolution, and potentially help in assessing the moon’s stores of water ice.
In this latter regard, the mission builds on work performed by Chandrayaan-1, which revealed water is present at the lunar poles, with subsequent studies suggesting much of this water is ice on the floors of polar craters, which have been in permanent shadow for billions of years. If this ice is easily accessible, it could be a critical enabling resource for the eventual human settlement of the moon, providing water, oxygen and fuel (hydrogen).
In all, Chandrayaan-2 is expected to operate for some 7 years.
Proxima Centauri: An Angry Star with Bad News for its Planet
In 2016, I wrote about Proixma b, a planet roughly 1.5 times the mass of Earth orbiting our nearest stellar neighbour, Proxima Centauri, 4.25 light years away (see: Exoplanets, dark matter, rovers and recoveries). Since then, and as a result of the planet being within the star’s zone of habitability, there has been a lot of debate about the potential for it to support life.

Numerical models have indicated that Proxima b probably lost a large amount of its water in its early life stages, possibly as much as one of Earth’s oceans. however, those models also suggest liquid water could have survived in warmer regions of the planet – such as on the side of the planet facing its star (Proxima b is potentially tidally locked with its parent star, always keeping the same face towards it). This means other factors that might affect habitability must be examined. Chief among these is the overall activity of the parent star – notably flares, coronal mass ejections and strong UV flux -, all of which can erode a planet’s atmosphere, rendering it uninhabitable in the long term.
That Proxima Centauri is very active with flares has been known for some time, as has been the star’s ability to generate “super-flares”, one of which in 2016 briefly raised the star’s brightness to the point of making it briefly visible to the naked eye from Earth. This activity has suggested that Proxima b is unlikely to support life (see: Curiosity’s 5th, Proxima b and WASP-121b). But the debate has remained.
Over the past year, a team of scientists at the Konkoly Observatory in Hungary have been using data from the Transiting Exoplanet Survey Satellite (TESS) to observe Proxima Centauri’s flare activity over a two month period, split between April and June 2019. They found that in the roughly 55-day period, the star pent around 7% of its time violently flaring, with a total of 72 relatively large-scale flares observed. In particular, the energy of the eruptions put them as not far below “super flare” status, suggesting the star could produce a super flare perhaps once every two years.
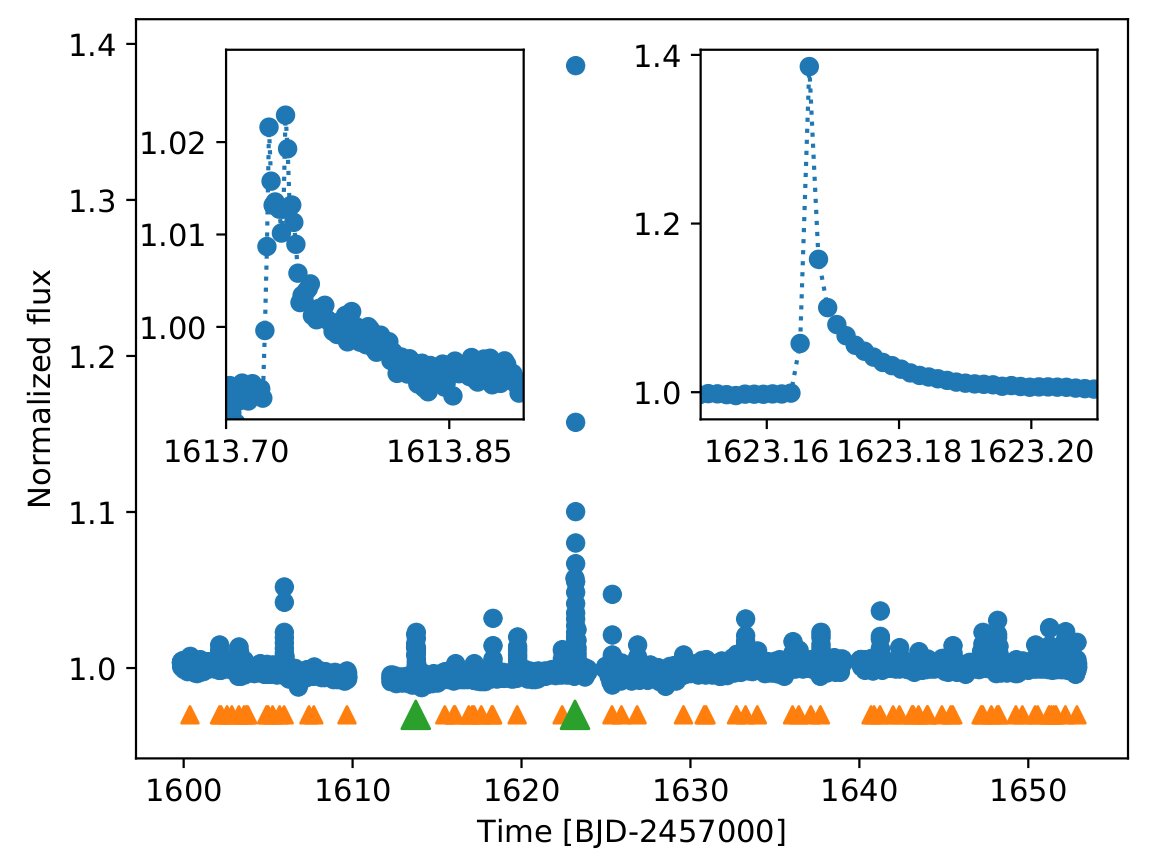
Such frequent, high-energy eruptions almost certainly have a severe impact on the atmosphere of Proxima Centauri b, disrupting it to a point where it cannot reach any steady state, leaving it continuously in a state of disruption and alteration, making the potential for the planet to support life even more remote. However, it also raises a curiosity about the star: the underlying magnetic frequency evidenced by Proxima Centaur. Such activity is normally associated with fast-rotating stars with periods of a few days. However, Proxima Centauri has a rotation period of ~80 days; so why it should be so active is now a subject for investigation.
Russia’s Robot Returns After ISS Visit
In what has been an interesting test mission, Russia’s first humanoid robot to fly in space has made a return to Earth.
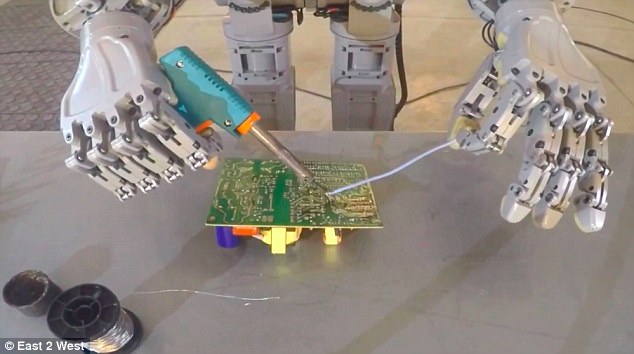
Referred to as “Skybot 850”, the 1.8m (6ft) tall robot is the latest in a series of such anthropomorphic robots collectively referred to as “Fyodor” and that are being tested for use to carry out a range of tasks, including construction, driving and operating in environments too hazardous for a human presence. “Skybot 850” was launched to the International Space Station (ISS) at 03:38 GMT on August 22nd aboard an otherwise uncrewed Soyuz capsule.

The Soyuz craft usually carries a crew of 3, but MS-14 was uncrewed flight for a number of reasons: it was the first flight of a Soyuz system using both a new launch abort system and an improved automated guidance and navigation system. The launch was also a further test of the Soyuz 2.1a launcher, the latest generation of the Soyuz rocket workhorse, which is currently being prepared for crewed launches, the first of which is due to take place in 2020.
For the flight “Skybot 850” took the commander’s seat in the capsule – not to fly the vehicle, but the give mission controllers an eyes-on capability of the vehicle’s flight control systems during the flight. The robot was also equipped with monitors to record the stresses a human body would feel during the launch. Instead, the flight, rendezvous with the ISS and docking was to be completed by the vehicle’s upgraded flight systems.
The initial flight was uneventful: the Soyuz reached the ISS on August 24th, and attempted an initial docking with the Russian Poisk module. This had to be aborted after an issue with the module’s KURS docking system. Instead, the Soyuz MS-13 also docked at the Poisk module was relocated to a docking port on the station’s Zvezda module, allowing MS-14 dock with Poisk on August 26th.
“Skybot 850” was a combined unit, capable of autonomous operations and interactions, able to answer questions, hold conversations and even tell jokes. It was programmed with the entire ISS operations manual, allowing it to provide detailed information to crew as and when required, although its primary role for this flight was more of a “social” role. In the future, the robot might be used for a broader range of tasks and activities – and could even support EVA activities.
As well as operating on an automated basis, the Fyodor robot series can also be used used in what is called “avatar mode” – directly operated by a human using a VR headset providing a “robot’s eye” view of its world, and a haptic system providing the operator with direct feedback when the robot is handling objects and tools. This meakes the system exceptionally flexible.

During its stay, the robot also offered a photo diary of its time on the ISS – something that also caused a certain amount of controversy in the form of claims of plagiarism. On August 31st, Roscosmos tweeted an image of Earth claimed to have been taken by the robot and complete with a “quote” from the machine.
Admiring our Earth from the porthole of Soyuz-MS14 at the end of the working day. She is beautiful. Studying and exploring space makes people smarter and makes them work together. And we, machines made by humans, are ready to help our creators go further.
– Robot Fyodor, August 31st, via Twitter (translated from the original Russian)
The problem? The picture was from NASA’s catalogue of ISS images, and had originally been taken on September 9th, 2010 by astronaut Doug Wheelock, who gained a reputation for the beauty of his orbital photos. However, given that Wheelock’s image is technically the property of NASA and a part of their public domain catalogue, the matter is hardly likely to cause an international incident.

In the meantime, Soyuz TM-14 undocked from the ISS on Friday, September 6th to carry the robot back to Earth. It landed safely at 21:32 GMT about 140 km ( 87 mi) south-east of the town of Dzhezkazgan, south-central Kazakhstan. The robot has been recovered with the re-entry capsule, and both will now be subject to post-flight analysis.
Giant Asteroid to Pass Earth
I’ve written a lot recently about near-Earth asteroids, and another one will rocket past Earth on September 14th, at a distance of 0.03564 AU (5.3 million km / 3.3 million mi) – just under 14 times the average distance between Earth and the Moon.
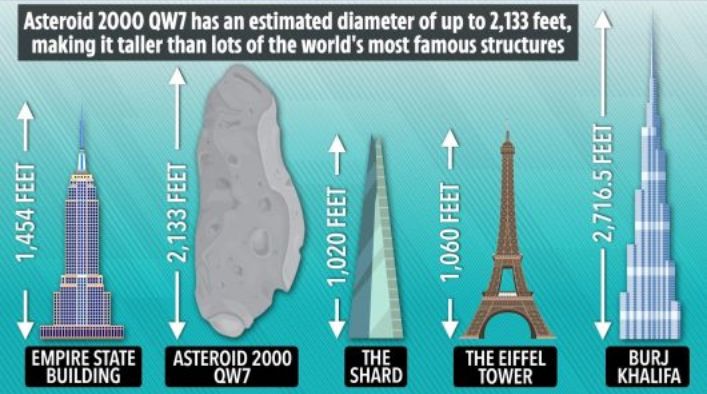
The rock, called 2000 QW7 and travelling at 23,100 km/h (14,361 mph) is estimated to be between 290 and 650 metres (951 and 2,132 ft) across. This puts it at the upper end of the size scale for 99942 Apophis, which will literally scrape by Earth in April 2029 at a distance of just 31,000 km. Were such an object as large as 2000 QW7 to strike Earth – and I emphasise there is no evidence to suggest it ever will – it could enter the atmosphere with a force in excess of 1,000 megatons. Not quite and extinction level event, but one that would cause widespread devastation and loss of life. After this year, the next time 2000 QW7 will come relatively close to Earth will be in 2038.
And Now for Something Completely Different
OK, so today is technically “Star Trek Day”, and I’m more a Trek fan than a Star Wars fan, but I couldn’t resist this – with thanks to Space.com. The video speaks for itself 🙂 .
