Following this, on the 28th/29th January, an overnight pre-load test was carried out to gain assurance that the large day/night/day temperature changes would not place additional stress on the rover’s arm while pressing on the drill. Temperatures at Gale Crater range from 0oC (32oF) in the daytime through to -65oC (-85oF) overnight, and over this temperature range, the rover’s arm, chassis and mobility system (wheels and drive system) expand and contract by around 2.4 millimetres (one-tenth of an inch).
“We don’t plan on leaving the drill in a rock overnight once we start drilling, but in case that happens, it is important to know what to expect in terms of stress on the hardware,” JPL’s Daniel Limonadi, the lead systems engineer for Curiosity’s surface sampling and science system, explained when discussing the tests. “This test is done at lower pre-load values than we plan to use during drilling, to let us learn about the temperature effects without putting the hardware at risk.”
Hammer Time
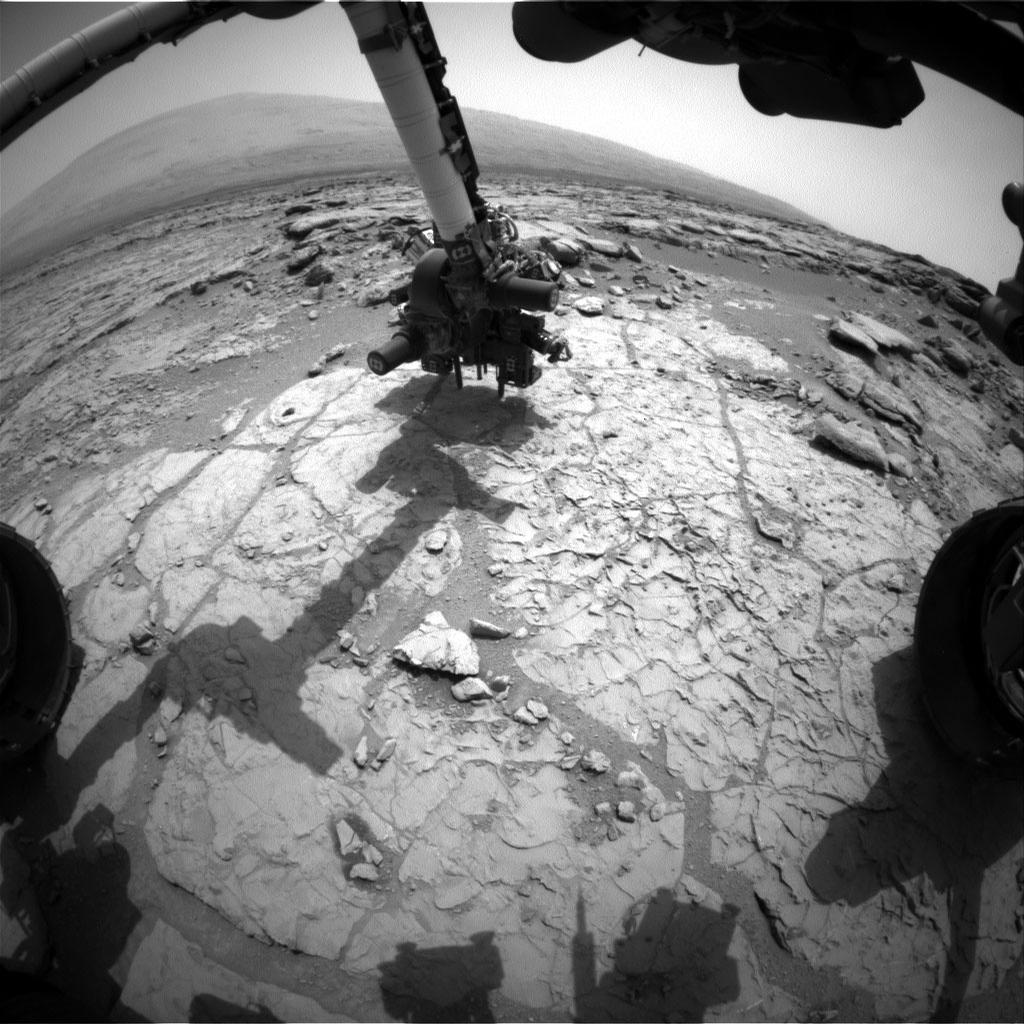
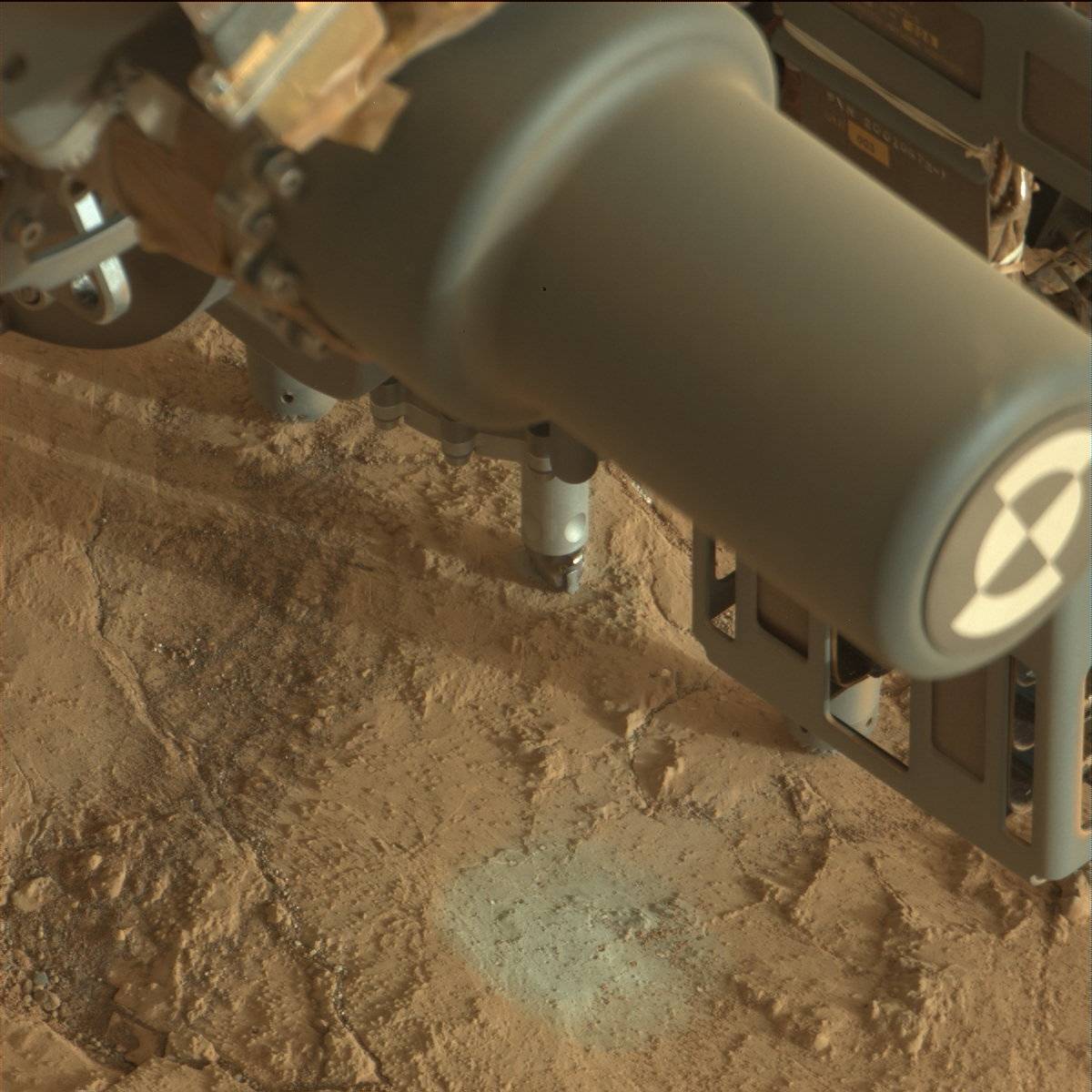
On January 31st (Sol 174), what is likely to be the final test prior to drilling operations actually commencing took place. This saw the drill mechanism’s percussive capabilities used for the first time in a test to confirm the percussive action was working within expected tolerances without actually rotating the drill bit, and to test the hardness of the rock itself. No samples were collected as a part of the test, although the results were closely imaged using both MAHLI and the Mastcam systems.
Commenting on the “slowly, slowly” approach to physically drilling into a rock for samples, Daniel Limonadi said, “We are proceeding with caution in the approach to Curiosity’s first drilling. This is challenging. It will be the first time any robot has drilled into a rock to collect a sample on Mars.”
Speaking to the UK’s BBC News, the mission’s principal investigator, John Grotzinger added, “The drilling is going very well so far and we’re making great progress with the early steps. The rock is behaving well and it looks pretty soft, so that’s encouraging.”

This test should now clear the way for actual drilling operations to commence. Even so, it will still be a while before samples reach Curiosity’s on-board Chemistry and Minerology (CheMin) and Sample Analysis at Mars (SAM) systems. This is because the sample gathering elements inside the drill mechanism are liable to have a microscope film of “oil” coating them – unavoidable contaminants resulting for the assembly and test routines performed on Earth. To overcome this, initial samples gathered using the drill will be used to “clean” the internal mechanism and then discarded prior to any samples being delivered to (initially) CheMin and then the more sensitive SAM instruments.
Nevertheless, if all goes according to plan, the initial drilling operations should commence this week.
All images courtesy of NASA/JPL.
