 It has continued to be a little quiet, news-wise where the Mars Science Laboratory (MSL) mission is concerned. As mentioned last time, this is hardly surprising, given the way the news cycle works.
It has continued to be a little quiet, news-wise where the Mars Science Laboratory (MSL) mission is concerned. As mentioned last time, this is hardly surprising, given the way the news cycle works.
Since my last report, Curiosity has started exploring the depression slight to east of Glenelg which has been given the name “Yellowknife Bay”. This is an area of one of three terrain types which come together within Glenelg itself (one of the other two being the terrain the rover has been traversing since its arrival on Mars at the start of August). It is very different in nature to the terrain found around the landing site at Bradbury Landing, and an initial approach to the area was halted on December 10th (Sol 123) when sensors on the rover reported conflicting angles of tilt to the main computer. While Curiosity was in no danger of toppling over, an on-board safety protocol was initiated which halted the rover’s planned drive while it ‘phoned home for advice.
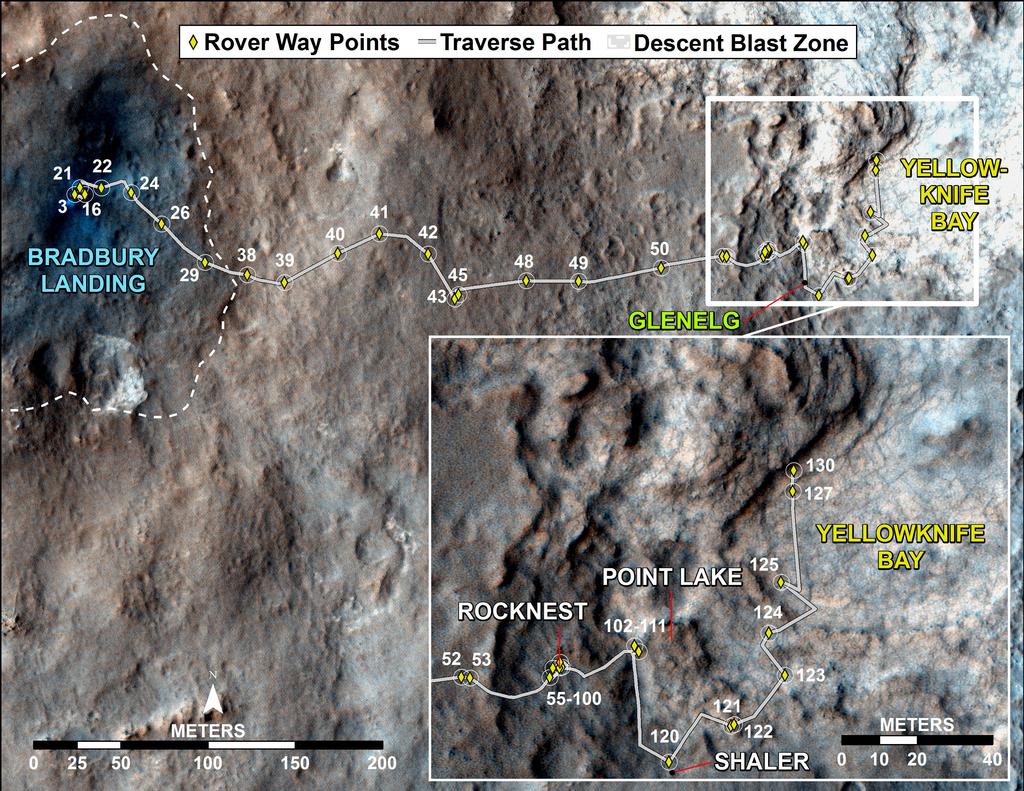
Confident the rover was in no danger, mission managers instructed Curiosity to resume its drive on Sol 124, which saw it complete the planned traverse from the 10th December and pass over a 1/2-metre lip into the depression proper. On Sol 125 (December 12th) Curiosity covered a further 26.1 metres (86 ft), moving well into the depression, surveying a number of rocks along the way with both the Mastcam system and ChemCam in a series of remote sensing exercises.
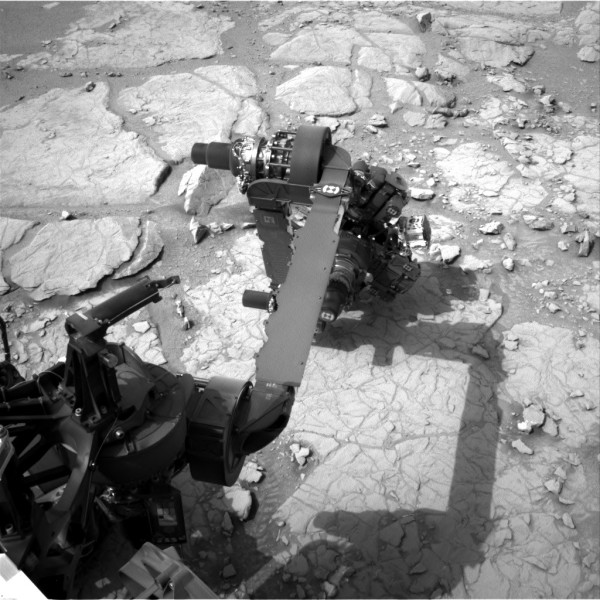
A prime mission goal for Curiosity’s explorations of Yellowknife Bay is the identification of a suitable candidate for the first use of the percussive drill – the last major item of equipment on the rover’s robot arm turret to be commissioned. As such, the rock surveys were part of this work.

The drill will be used to collect samples from inside Martian rocks, something never before attempted on Mars. The powdered sample, once obtained, will be passed through the CHIMRA system which is also used to sieve and sort samples obtained by the soil scoop, before being passed to CheMin and SAM aboard the rover for detailed analysis.
On December 14th, Curiosity completed a drive of 32.8 metres (108 ft) to reach two “targets of interest” which mission planners dubbed “Costello” and “Flaherty”. Each of these rocks was subjected to study using the Alpha Particle X-Ray Spectrometer (APXS) and MAHLI, the Mars Hand Lens Imager, both mounted on the rover’s robot arm turret. These studies lasted a couple of days, during which Curiosity carried out various REMS monitoring activities as well; then on Sol 130 a further drive of just 5.6 metres (18 ft).
This period has seen the completion of a major operational shift in the MSL programme, transferring overall management of the rover from the engineering team to the science team. This work started some time ago, and has seen a gradual “upshift” in rover operations from pre-scripted activities related to the commissioning of the onboard systems and science instruments to more of what is called “discovery-driven planning”, whereby much more of the daily operations for the rover’s activities are based on science analysis of images and data returned to Earth by Curiosity. This means that while the science team has always had imput into where and when various activities should be performed, such as the first soil sample gathering exercises at “Rocknest”, they are now getting greater and greater freedom into where to send the rover and in instructing it what to look at and what it should be doing. JPL colloquially refer this to “handing over the rover’s keys” to the science team .
Getting Set for Christmas – and more
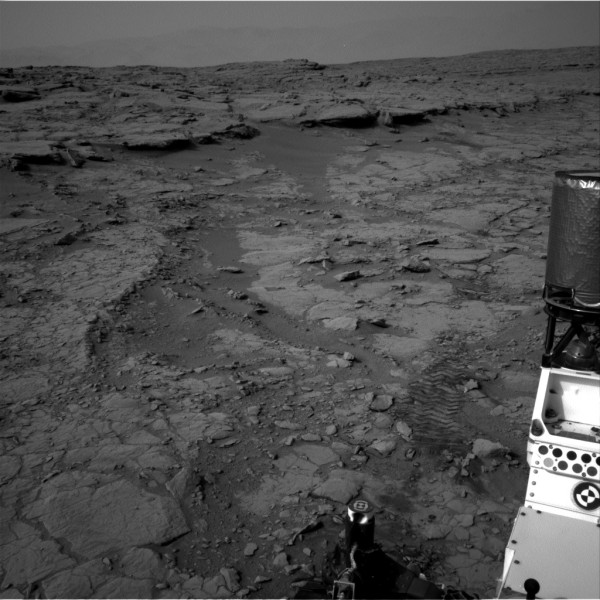
By Sol 130, December 18th, Curiosity had covered a distance of 677 metres (0.42 miles) on Mars. With Christmas approaching, JPL is getting ready for staff to be taking time off over the holidays, so one more drive of some 30 metres (97.5 ft) was planned and executed prior to the Christmas break, which delivered the rover to an area in Yellowknife Bay dubbed “Grandma’s House”.This is close to what appears to be an ancient stream bed, and it will be Curiosity’s “home” for the 11-day Christmas / New Year period.
Preparations for the holiday period have seen the mission team spend two days uploading what is effectively 11 days of instructions to the rover. This is not only vital for ensuring the rover keeps busy through the holiday period, but is also a test to ensure the team and the rover are ready for periods of solar conjunction during the mission.

Solar conjunction occurs when the Earth and another object in the solar system – in this case Mars – are on opposite sides of the Sun. During such periods, which can last several weeks, communications between Earth and vehicles operating on and around Mars are severely disrupted / curtailed due to interference from the Sun, so NASA effectively places all of their Mars missions on “autopilot” during the period of conjunction. As such, the Christmas holiday period is a good initial test to ensure that Curiosity is ready for future solar conjunctions, the first of which for the mission will be occurring in April 2013.
During the holiday break, a small team will remain on-hand should Curiosity call home with a problem, otherwise the rover will be left largely to is own devices gathering more REMS and other data for the region and performing another 360-degree panoramic capture of the Yellowknife area using the Mastcam systems.
