August 5th marked the 2nd anniversary on Curiosity’s landing on Mars. The “landiversary”, as NASA dubbed the occasion, passed in something of a subdued manner in many respects, featuring a re-run of the August 2012 video reviewing the MSL’s arrival on Mars. Reviews of the mission from the perspective of two years on from that remarkable lading didn’t start-up until the days after the anniversary, with videos and lectures from members of the mission team.
One of the films which did appear, directly out of Caltech, rather than NASA’s Jet Propulsion Laboratory (which is located on Caltech’s Pasadena, California, campus), is Our Curiosity, a 6-minute celebration of Curiosity’s mission, and humanity’s drive to explore, to seek, to learn, and to understand, narrated by Felicia Day and the superb Neil DeGrasse Tyson.
August 5th also marked my last MSL report, when Curiosity was some 3 kilometres from the lower slopes of “Mount Sharp”, the huge mound at the centre of Gale Crater, and the rover’s primary target for exploration. At that time, the rover had started to cross a region of chaotic terrain, marked by a rocky plateau cut by a series of sandy-bottomed valleys. The plateau itself proved to be littered with sharp-edges rocks and stones which had already caused some increase in the wear and tear being suffered by the rover’s wheels – albeit not as much as mission engineers had feared – by the time Curiosity had reached the edge of the nearest of the shallow valleys, which had been dubbed “Hidden Valley”.
The plan had been to use the valleys, where the sand would be less wearing on the rover’s aluminium wheels, to reach an exposed area of bedrook designated the “Pahrump Hills”, where Curiosity would engage in further rock sampling work prior to it continuing on to the “Murray Buttes”, the entry point for its ascent up the lower slopes of “Mount Sharp”.
However, rather than drive the one-tonne rover straight through the middle of the valley, where there are numerous dunes of potentially soft, wind-blown sand which might cause some difficulty traversing, the idea had been for Curiosity to skirt along the edge of the valley, where it was hoped the sand would be firmer and make for a better driving surface. Unfortunately, this proved not to be the case; as the rover proceeded along “Hidden Valley” it exhibited far more signs of wheel slippage than had been anticipated, giving rise to fears that it might get bogged-down in the sand were it to continue.
The sands of Mars: an image from Curiosity’s black and white Navcam system captured on August 4th, showing the loose sands the rover was traversing as it continued into “Hidden Valley” (click for full size)
As a result, the rover reversed course, driving back out of the valley. In doing so, it crossed the rocky “ramp” it had used to originally enter the valley, and one of its wheels cracked the slab-like rock’s surface, revealing bright material within, possibly from mineral veins. The rock, dubbed “Bonanza King” showed similar signs of origin as “Pahrump Hills”, so a decision was made to examine it as a possible substitute drilling site.
“Geologically speaking, we can tie the Bonanza King rocks to those at “Pahrump Hills”. Studying them here will give us a head start in understanding how they fit into the bigger picture of Gale Crater and Mount Sharp,” said Curiosity Deputy Project Scientist Ashwin Vasavada, before continuing, “This rock has an appearance quite different from the sandstones we’ve been driving through for several months. The landscape is changing, and that’s worth checking out.”
August 5th 2014 marked the second anniversary of Curiosity’s remarkable arrival on Mars, in what was dubbed by members of the mission team as the “seven minutes of terror”.
It was one of the most anticipated touch-downs of a remote vehicle on another planet in history, and was followed minute-by-minute the world over via the Internet, with people watching NASA TV, following events on Twitter and even witnessing them in “real-time” through the unique focus of NASA’s Eyes on the Solar System simulator website (you can still replay the landing on the simulator).
Since then, Curiosity has done much, including meeting its primary science goal to find evidence of environments which may once have been suitable for the nurturing of microbial life (Curiosity isn’t able to detect any evidence of microbial life, past or present itself as it has no direct means to identify organic compounds or minerals, that will be the role of the next rover mission, scheduled for 2020 – see later in this article).
Most recently, the rover has been approaching its main exploratory goal, the large mound at the centre of Gale Crater which has been dubbed “Mount Sharp” by NASA, having been “on the road” for almost a year, driving steadily south, with the occasional stop-over at various scientific points of interest.
Since my last MSL update, Curiosity has achieved another mission mile stone and another mission first. On June 27th, the day of my last update, the rover trundled over the boundary line of its 3-sigma landing ellipse. Then on July 12th, it captured new images of its onboard laser firing.
As to the first of these events, I’ll let Guy Webster of NASA’s Jet Propulsion Laboratory explain.
“You must be wondering, ‘What the heck is a 3-sigma landing ellipse?’ It is a statistical prediction made prior to landing to determine how far from a targeted centre point the rover might land, given uncertainties such as the atmospheric conditions on landing day. The ‘3-sigma’ part means three standard deviations, so the rover was very, very likely (to about the 99.9-percent level) to land somewhere inside this ellipse. Such 3-sigma ellipses get a lot of scrutiny during landing-site selection because we don’t want anything dangerous for a landing – such as boulders of cliffs – inside the ellipse.”
In Curiosity’s case, the 3-sigma ellipse marked a relatively flat area on the floor of Gale Crater some 7 x 20 kilometres (4 x 12 miles) in size which was as close to the slopes of “Mount Sharp” as mission planners dare to bring the rover in for landing without risking it coming down in either chaotic terrain or on a slope where it might slide or topple over as the Skycrane set it down. The landing zone was also relatively close to the areas of geological interest which became known as “Glenelg” and “Yellowknife Bay”, and which the rover spent a good part of a year exploring – achieving its primary science goal in the process.
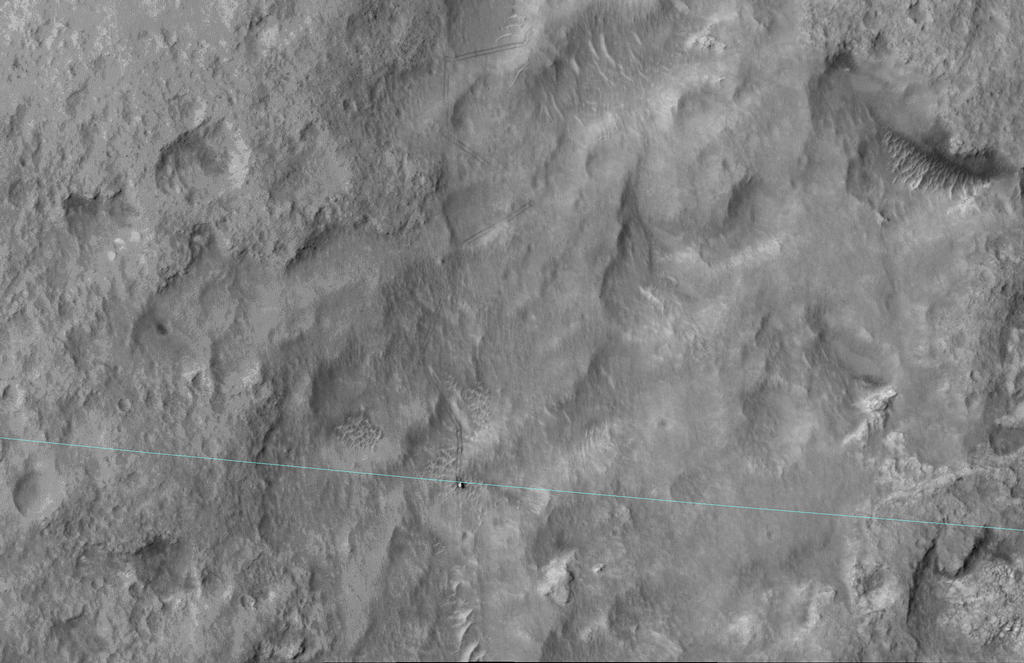
The Mars Reconnaissance Orbiter was overhead at the time the rover crossed this imaginary line in the sands of Mars, and captured the moment using its High Resolution Imaging Science Experiment (HiRISE) camera.
Caught in its tracks: NASA’s Mars Reconnaissance Orbiter photographs Curiosity as the rover crosses the boundary (marked by the blue line) of its original landing ellipse (click any image in this article for full size)
Sol 687 (July 12th, 2014 PDT) was the day on which the rover captured images of its laser firing on a rock dubbed “Nova”.
The laser, which is a part of the ChemCam system on mounted on the rover’s mast, is used to vaporise minute amounts of material on target rocks. Light from the resultant plasma is captured by ChemCam’s telescope for spectrographic analysis.
In all, the laser has been fired over 150,000 times in the two years since Curiosity arrived on Mars, and the results of firings have been seen in many “before and after” shots of rocks on the receiving end of a laser burst. What made this event special was that the burst firing at “Nova” was captured by the rover’s turret-mounted Mars Hand Lens Imager (MAHLI). This allowed NASA to produce a film showing the moment of impact of the laser shots.
In the first part of the film, the initial “spark” of a single laser pulse can be seen striking the surface of “Nova”. This is followed by an enhanced set of images showing the laser firing at 10 times a second, disrupting dust and minerals on the rock as the plasma cloud erupts.
Monday June 23rd was notable in two worlds as a special occasion.
For the virtual world of Second Life, it marked the 11th anniversary of opening the doors to the public. On Mars, it marked the completion of Curiosity’s first Martian year on the planet (687 days).
To mark the event, NASA released a “selfie” of the rover as it sat next to a rock called “Windjana”, which was the site of the rover’s third drilling / sample gathering operation, in the region dubbed “The Kimberley”.
The images used in the picture were captured using the Mars Hand Lens Imager (MAHLI), located on the turret mounted on the rover’s robot arm, were captured on 613th Martian day, or Sol, of Curiosity’s work on Mars (April 27th, 2014, PDT) and Sol 627 (May 12th, 2014, PDT). Combined, they show the rover in a parked configuration together with the sample gathering hole cut into “Windjana”, the drilling operation having taken place on Sol 621 (Monday May 5th, 2014, PDT).
Curiosity’s selfie: all of the rover except the robot arm is visible in this composite image made up of shots taken before and after the “Windjana” sample drilling – the hole from which is visible, lower left
Since that time, the rover has resumed the drive down towards “Murray Buttes”, the point where it is hoped Curiosity will be able to bypass a line of sand dunes and make its way onto the lower slopes of “Mount Sharp”, more properly called Aeolis Mons, the large mound occupying the central area of Gale Crater and the missions’ primary target for investigation.
Curiosity is now over half-way to “Murray Buttes”, with no further major waypoints to be examined on the route. however, due to the wear-and-tear on the rover’s wheels while traversing a part of “The Kimberley” and “Cooperstown” before it, the route southwards has been revised somewhat to offer smoother driving terrain for the rover.
The added wear-and-tear of the wheel first became something of a concern in February of this year, and later prompted a revision to in the planned route to reach the desired waypoint at “The Kimberley” and also in the rover driving team perfecting new techniques for driving the rover – such as by taking it backwards over some terrain.
The (Martian) year to date: from Bradbury Landing in august 2012, through “Glenelg” and “Yellowknife Bay” and onwards to “The Kimberley”, Curiosity’s travels in Gale Crater and, in white, the planned route to “Murray Buttes”.
Following its departure from “The Kimberley” on Sol 630 (May 15th, 2014, PDT), the rover drove almost continuously for a month, covering a further 1.2 kilometres 0.75 miles), and is still continuing onwards.
Although Curiosity’s route will carry it past the majority of the sand dunes between it and “Mount Sharp”, it will have to traverse an area of sand in order to reach its major target. To help with this, the rover’s Earthbound “stunt double”, dubbed the Scarecrow, was taken out to the Dumont Dunes in California’s Mojave Desert, near Death Valley, where it was put through a series of test drives over real and artificially constructed sand dunes and various terrains. This allowed engineers to examine the rover’s behaviour over softer terrain types, enabling them to better understand how the rover might react when encountering similar surfaces on Mars.
It’s been a month since my last MSL update, so I’m lagging badly; however, mission news coming out of JPL has been a little lax, so I’m not too far behind the times.
Following my lastCuriosity report, drilling and sample-gathering in the area dubbed “The Kimberley” has been completed, and the rover is once more on the move, heading west before turning more to the south once more.
The drilling / sampling operation took place on Sol 621 (Monday May 5th, PDT, 2014), with the percussion drill mounted on the rover’s robot arm turret cutting a hole some 6.5 centimetres (2.6 inches) deep and 1.6 cem (0.63 in) across into a flat sandstone slab which had been dubbed “Windjana” shortly after Curiosity arrived in “The Kimberley” at the end of March 2014. The tailings gathered as a part of the drilling operations were delivered to the CHIMRA (Collection and Handling for In-Situ Martian Rock Analysis) system, in preparation for them to be transferred to the rover’s on-board science laboratory. Confirmation that the sample-gathering had been successful came early in the morning (PDT) on Tuesday May 6th.
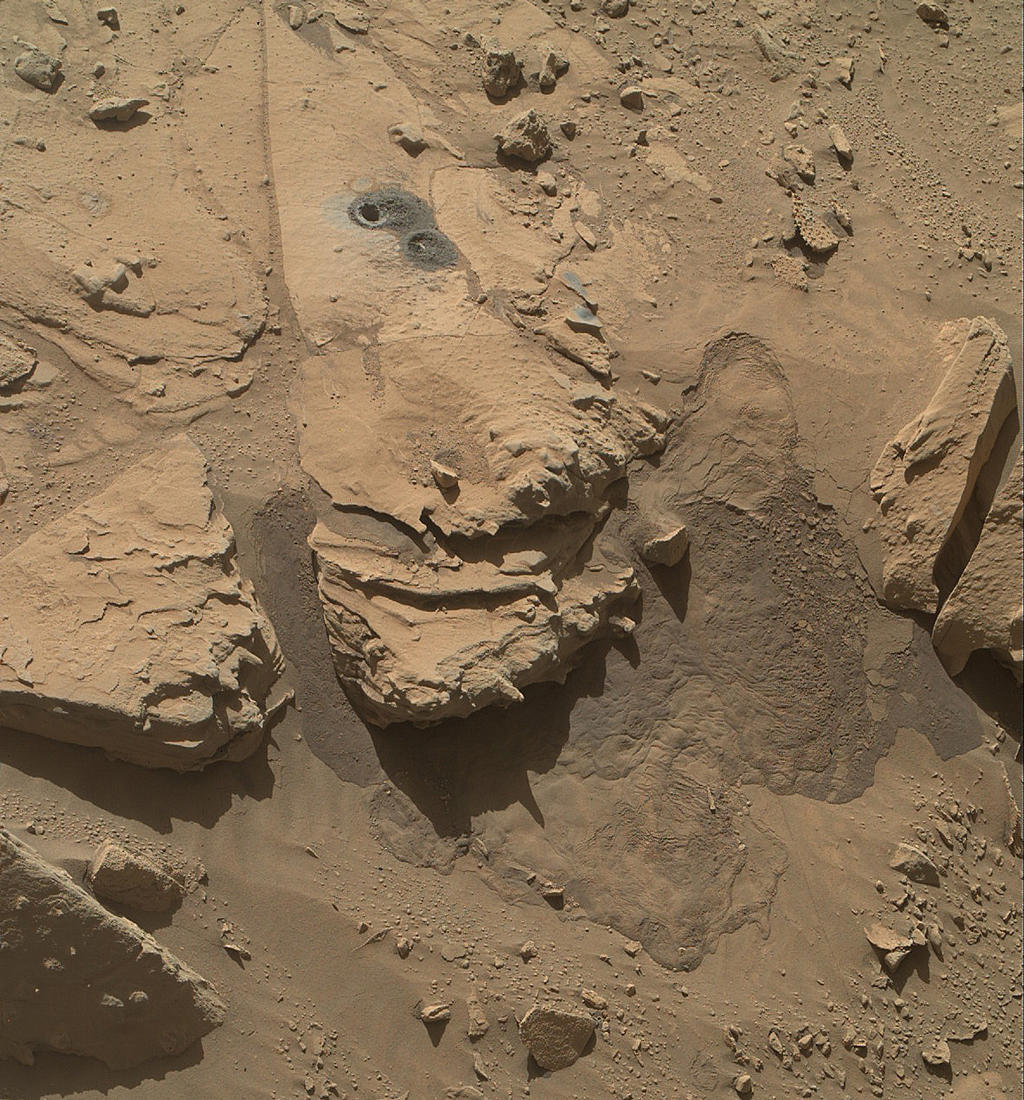
Holey moley. An image captured by the Mars Hand Lens Imager (MAHLI) Curiosity’s robot arm turret on Sol 627 (May 12th PDT, 2014) showing the sample gathering hole cut into “Windjana”. Dark tailings from the operation lay around the hole and have partially filled the test drilling hole just below it. The two patches of grey visible slightly to the right and blow the drill holes mark the points where Curiosity’s ChemCam laser was used to vapourise dust covering the surface of the rock. Surface material around the rock was subjected to miniature “landslides” as a result of the percussive hammering of the drill (click to enlarge)
The drilling operation, the third time Curiosity has gathered samples from inside a Martian rock for analysis, has caused some excitement among the mission team. “The drill tailings from this rock are darker-toned and less red than we saw at the two previous drill sites,” Jim Bell, deputy principal investigator for Curiosity’s Mast Camera (Mastcam) said after the drilling operation. “This suggests that the detailed chemical and mineral analysis that will be coming from Curiosity’s other instruments could reveal different materials than we’ve seen before. We can’t wait to find out!”
Curiosity’s first two drilling operations took place over a year ago in the “Yellowknife Bay” area of Gale Crater, some four kilometres (2.5 miles) north-east of “The Kimberley”. Analysis of those samples, gathered from mudstone yielded evidence that “Yellowknife Bay” had once been a part of an ancient lakebed environment which contained key chemical elements and a chemical energy source that long ago provided conditions favourable for microbial life.
Following their transfer to CHIMRA, the tailings cut from “Windjana” were sifted and graded in readiness for delivery to the ChemMin (Chemical and Mineralogical analysis) and SAM (Sample Analysis at Mars) suites of instruments, located in the body of the rover. The initial sample transfer to both instrument suites was made on May 15th PDT, 2014. and analysis of the samples should be carried out as the rover continues its journey towards the lower slopes of “Mount Sharp”.
A composite of eight shots from MAHLI showing successive dot-like strikes from the ChemCam laser, both within the sample drilling hole at “Windjana” and where the tailings have mixed with surface dust (top right). Such strikes allow the chemical composition of the dust and rock to be analysed (click to enlarge)
Prior to departing “The Kimberley”, Curiosity carried out a final set of science operations. These involved using the turret-mounted MAHLI (Mars Hand Lens Imager) and spectrometer to examine the texture and composition of the cuttings from the sample drill hole in situ. The ChemCam laser was also used to vapourise some of the drill tailings on the surface of “Windjana” and rock from the inside of the sample hole itself, allowing the ChemCam to analyse the chemical composition of the resultant vapours.
Things are starting to pick-up on Mars once more as Curiosity starts into a new round of science studies in the region dubbed “The Kimberley”. Having been surveying the region since its arrival there at the beginning of April, the rover was commanded to move to a sandstone slab scientists dubbed “Windjana” after a gorge in Western Australia, and is in keeping with giving notable landmarks in the area unofficial names lifted from that part of Australia.
The slab lay a short distance roughly southwards from the rover’s position where the Mars Reconnaissance Orbiter (MRO) imaged it on April 11th, 2014. Following the initial selection of the slab as an area for further study, the rover was commanded to drive closer to it to enable further visual inspection. The slab is around 60 centimetres (2 feet) across, and was selected because it offered a good surface for drilling, and lay within what scientists call the “middle unit” because its location is intermediate between rocks that form buttes in the area and lower-lying rocks that show a pattern of striations.
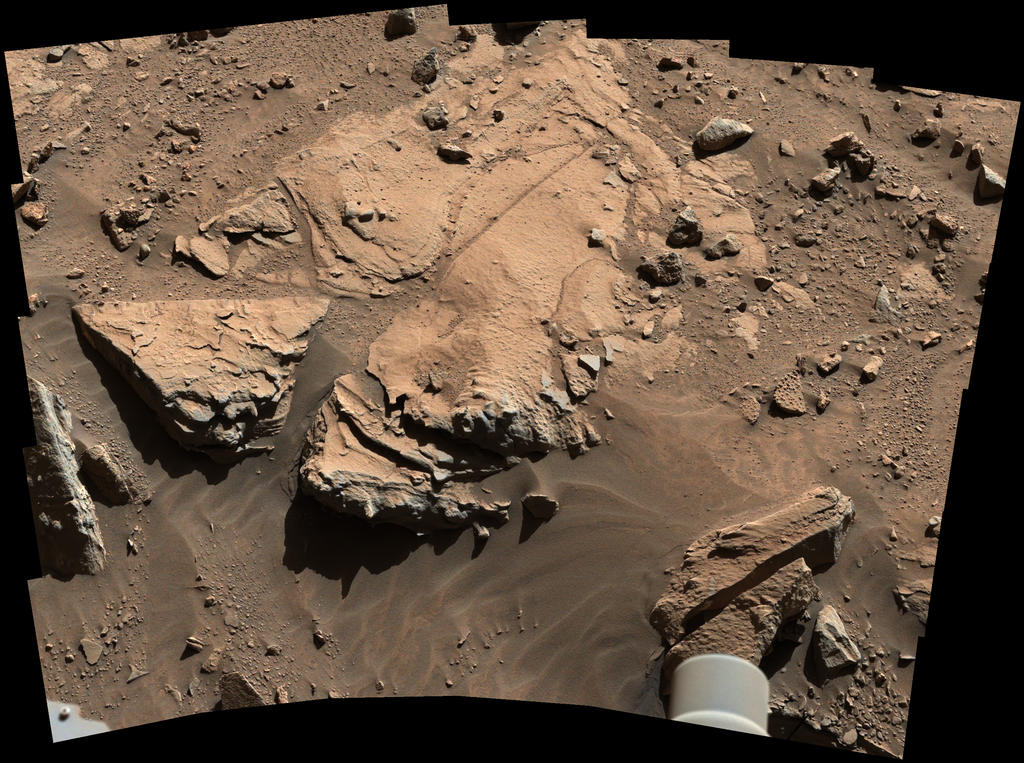
A white-balanced image, calibrated, linearly scaled and brightened to present colours that resemble those that would be seen under daytime lighting conditions on Earth, of the rock dubbed “Windjana”. The image combines several exposures taken by the Mastcam’s left-eye camera during the 609th Martian day, or Sol, of the rover’s work on Mars (April 23rd PDT, 2014).
The sandstone rock in the area is of particular interest to mission scientists because it represents a somewhat different environment to that studied extensively by Curiosity during the time it spent in the “Yellowknife Bay” area, drilling and sampling mudstone rocks.
“We want to learn more about the wet process that turned sand deposits into sandstone here,” Curiosity’s lead Project Scientist, John Grotzinger, explained. “What was the composition of the fluids that bound the grains together? That aqueous chemistry is part of the habitability story we’re investigating.”
Understanding why some sandstones in the area are harder than others also could help explain major shapes of the landscape where Curiosity is working inside Gale Crater. Erosion-resistant sandstone forms a capping layer of mesas and buttes. It could even hold hints about why Gale Crater has a large layered mountain, dubbed “Mount Sharp” (officially called Aeolis Mons), at its centre.
Once the rover had positioned itself close to the rock, initial inspection operations were carried out, which included using the turret-mounted spectrometer on Curiosity’s robot arm as well as the mast-mounted ChemCham laser so that the rock could be properly analysed ahead of any drilling operation. These operations also included deploying the rover’s “wire brush” to clean an area of the rock’s surface, removing dust and debris to expose the rock itself, allowing for further examination and analysis.
Clean sweep: a “before and after” animation showing a patch of the sandstone rock dubbed “Windjana” scrubbed clean of surface deposits ready for further examination. The images used in the animation were taken by the turret-mounted Mars Hand Lens Imager (MAHLI) during the 612th Martian day, or Sol (April 26th PDT, 2014). The exposed area of grey rock measures some 6 centimetre (2.5 inches) across.
Before any sample drilling could occur, however, the rover would need to carry out a “mini-drilling” operation, much as it did at “Yellowknife Bay”. Such operations both confirm the drill’s readiness for sample gathering and confirm that the subject rock is a suitable target for drilling and gathering sample material.
This “mini-drilling” operation took place on Tuesday, April 29th, cutting a hole around 2 centimetres (0.8 inch) deep into the rock. This allowed the science team to evaluate the interaction between the drill and this particular rock – an important factor given issues enountered due to vibration during the rover’s previous operations – and also for the tailings of powder rock created by the drilling operation to be examined for their suitability for collection by the drilling mechanism.
When collecting sample material, the rover’s hammering drill bores as deep as 6.4 centimetres (2.5 inches) into a target rock. As it does so, some of the tailings from the drilling operation are forced up into the drill bit itself, and delivered to one of two holding chambers (Chambers A and B in the diagram below) located in the head of the drill bit mechanism.
How the drill works: On the left, a view of the drill mechanism mounted on the rover’s turret, with the drill bit centre bottom. On the right a cutaway showing the sample collection mechanism in the drill bit
Once drilling is complete, the gathered samples are transferred to CHIMRA – the Collection and Handling for In-Situ Martian Rock Analysis system, also within the rover’s turret system, where the tailings are sifted and sorted ready for eventual transfer to the Curiosity’s on-board chemical laboratory systems, comprising the Chemical and Mineralogy (CheMin) and Sample Analysis at Mars (SAM) suites of instruments.
At the present time, the outcome of the analysis of the mini-drilling operation, and the suitable of “Windjana” as a sample-gathering point is unclear; however, it would appear likely that sample drilling operations will go ahead nearby as a result of this test.
An image from Curiosity’s Mars Hand Lens Imager (MAHLI) instrument shows the “mini-drilling” operation hole cut by the rover’s drill mechanism on Sol 615 (April 29th PDT, 2014). The hole is some 2 centimetres deep and 1.6 centimetres in diameter.
First Asteroid Image from the Surface of Mars
Curiosity racked-up another first on Sol 606 (April 20th), when the Mastcam captured the first image of asteroids taken from the surface of Mars. The image was combined with pictures captured the same night of the Martian Moons Phobos and Deimos, and the planets Jupiter and Saturn. Deimos, the outermost on the Martian moons, and which may have itself been an asteroid prior to wandering in Mars’ gravitational influence, appears at its correct location in the sky at the time the image of Ceres and Vista was captured. Phobos, Jupiter and Saturn, which were all imaged at different times, are shown as inset images on the left. All of the images form a part of ongoing astronomical work the rover has been performing periodically.
Ceres, with a diameter of about 950 kilometres (550 miles), is the largest object in the asteroid belt, large enough to be classified as a dwarf planet. Vesta is the third-largest object in the asteroid belt, about 563 kilometres (350 miles) wide. These two bodies are the destinations of NASA’s Dawn mission, which orbited Vesta in 2011 and 2012 and which is now on its way to begin orbiting Ceres in 2015.
A composite of images taken after nightfall on the 606th Sol (April 20, 2014, PDT) of Curiosity’s work on Mars, showing the asteroids Vesta and Ceres, and Mars’ outer moon, Deimos. The same night, the rover also captured images of Mars’ inner moon, Phobos, and the planets Jupiter and Saturn, shown in the inset images
The main image appears grainy, with Ceres, Vista and three stars appearing as streaks because it was captured over a 1-2 second exposure period. The graining on the image is the result of cosmic rays striking the camera detector is the image was captured. The images of Deimos, Phobos, Jupiter and Saturn were all captured over a much shorter 0.25-second exposure, thus rendering them as bright objects against a “clean” black background. Sunlight reflected by Deimos makes it appear overly large.
The interesting point (for those into astronomy) with the main image is that Vesta and Ceres would be naked-eye visible to anyone with average eyesight were they to be standing on the surface of Mars.
On Wednesday April 16th, NASA JPL released a remarkable image captured using the High Resolution Imaging Science Experiment (HiRISE) camera on the Mars Reconnaissance Orbiter (MRO).
The image reveals the the Mars Science Laboratory, Curiosity parked alongside the multi-layered rock formation dubbed “The Kimberley”, as it prepares to undertake a range of science studies in the area.
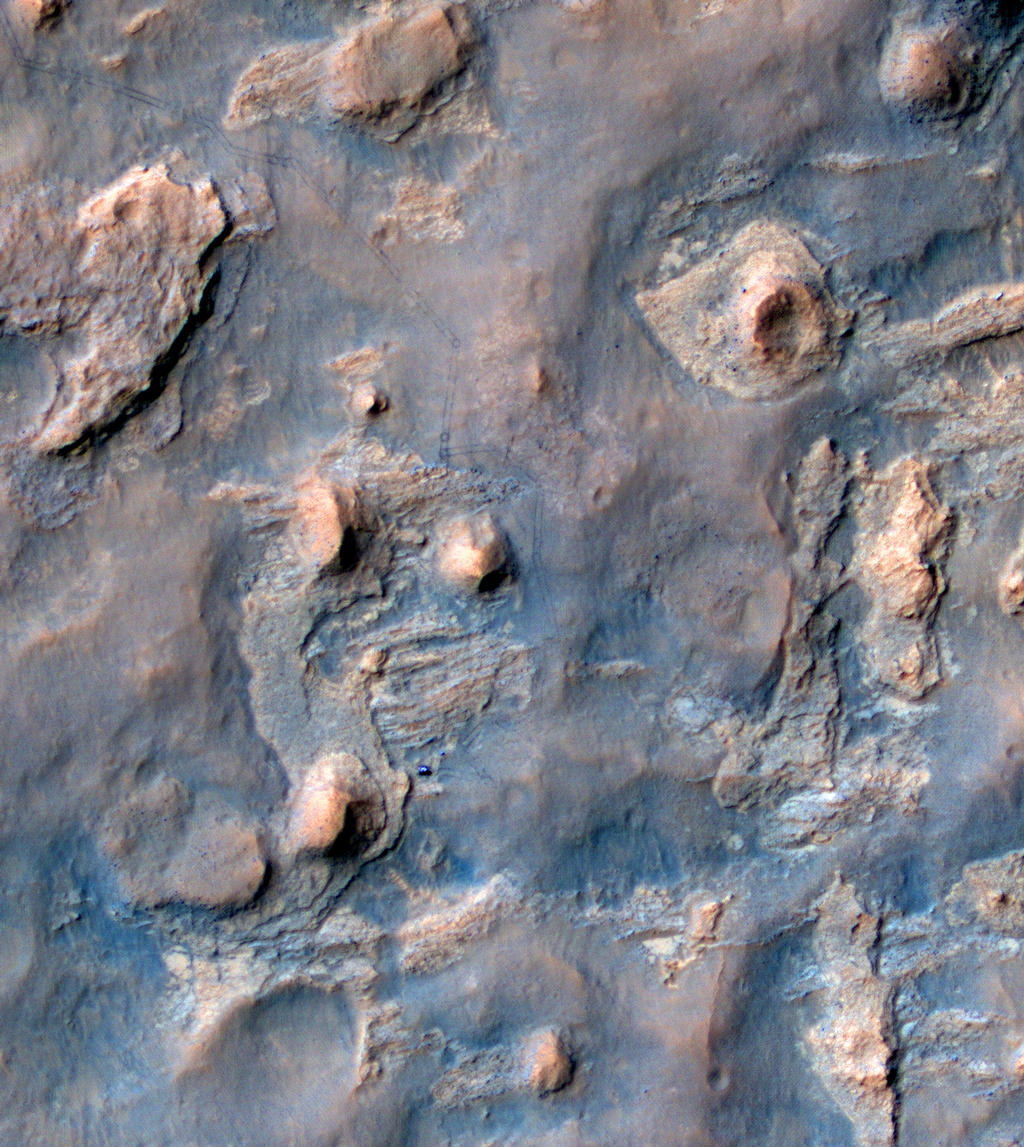
The image was captured by MRO on April 11th during an overflight of the rover’s position as it sits at the foot of a rocky butte mission scientists have dubbed “Mount Remarkable”, and which forms a part of a multi-layered rocky location which has been dubbed “the Kimberley” due to its resemblance to a similar confluence of rock types found in Western Australia.
A rover’s progress: Curiosity, the blue form just off-centre in this false-colour image, sits at the foot of “Mount Remarkable”, a butte located in the area mission scientists have dubbed “the Kimberley”. the rover’s tracks can be seen leading back toward the top left corner of the image, where it entered the region on March 12th, 2014.
“The Kimberley” is an area of four distinguishable rock types exposed close together in a decipherable geological relationship to each other. As such, they should provide further clues about ancient environments that may have been favourable for life. It is of particular interest to Scientists because like “Yellowknife Bay”, where the rover spent several months analysing and drilling rocks, “the Kimberley” demonstrates features which suggest that some of the rocks have only been exposed for a short time, geologically speaking.
This matters because Mars doesn’t have a magnetosphere and thick atmosphere like Earth’s, which protect us from energetic particles from space that break down organic material. So, rocks that have been exposed or close to the surface for a very long time are less likely to contain complex organic material, which might either be the remnants of past life, or help inform scientists about past habitability, the potential to support life in an area – as was the case with “Yellowknife Bay”.
 August 5th marked the 2nd anniversary on Curiosity’s landing on Mars. The “landiversary”, as NASA dubbed the occasion, passed in something of a subdued manner in many respects, featuring a re-run of the August 2012 video reviewing the MSL’s arrival on Mars. Reviews of the mission from the perspective of two years on from that remarkable lading didn’t start-up until the days after the anniversary, with videos and lectures from members of the mission team.
August 5th marked the 2nd anniversary on Curiosity’s landing on Mars. The “landiversary”, as NASA dubbed the occasion, passed in something of a subdued manner in many respects, featuring a re-run of the August 2012 video reviewing the MSL’s arrival on Mars. Reviews of the mission from the perspective of two years on from that remarkable lading didn’t start-up until the days after the anniversary, with videos and lectures from members of the mission team.