 It’s been a month since my last MSL update, so I’m lagging badly; however, mission news coming out of JPL has been a little lax, so I’m not too far behind the times.
It’s been a month since my last MSL update, so I’m lagging badly; however, mission news coming out of JPL has been a little lax, so I’m not too far behind the times.
Following my last Curiosity report, drilling and sample-gathering in the area dubbed “The Kimberley” has been completed, and the rover is once more on the move, heading west before turning more to the south once more.
The drilling / sampling operation took place on Sol 621 (Monday May 5th, PDT, 2014), with the percussion drill mounted on the rover’s robot arm turret cutting a hole some 6.5 centimetres (2.6 inches) deep and 1.6 cem (0.63 in) across into a flat sandstone slab which had been dubbed “Windjana” shortly after Curiosity arrived in “The Kimberley” at the end of March 2014. The tailings gathered as a part of the drilling operations were delivered to the CHIMRA (Collection and Handling for In-Situ Martian Rock Analysis) system, in preparation for them to be transferred to the rover’s on-board science laboratory. Confirmation that the sample-gathering had been successful came early in the morning (PDT) on Tuesday May 6th.
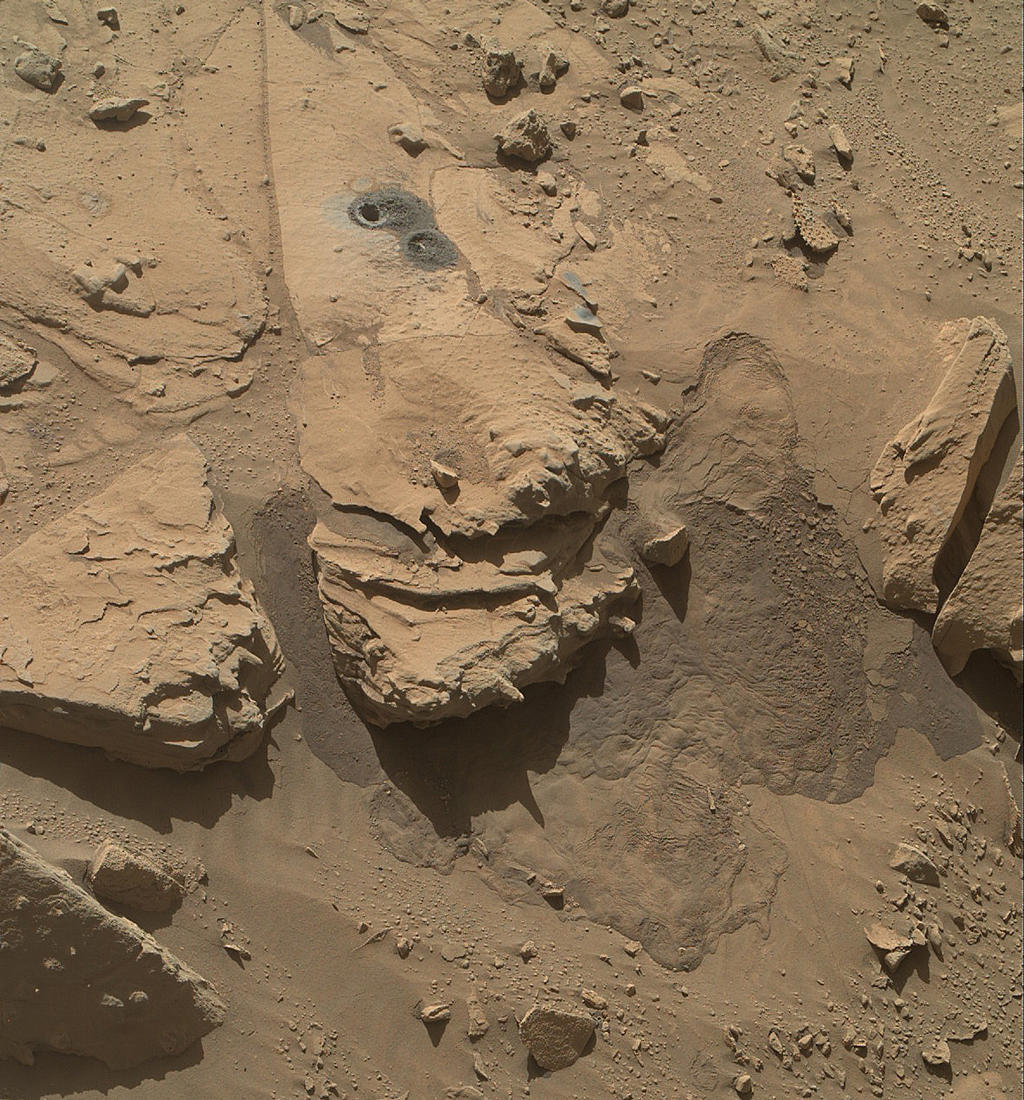
The drilling operation, the third time Curiosity has gathered samples from inside a Martian rock for analysis, has caused some excitement among the mission team. “The drill tailings from this rock are darker-toned and less red than we saw at the two previous drill sites,” Jim Bell, deputy principal investigator for Curiosity’s Mast Camera (Mastcam) said after the drilling operation. “This suggests that the detailed chemical and mineral analysis that will be coming from Curiosity’s other instruments could reveal different materials than we’ve seen before. We can’t wait to find out!”
Curiosity’s first two drilling operations took place over a year ago in the “Yellowknife Bay” area of Gale Crater, some four kilometres (2.5 miles) north-east of “The Kimberley”. Analysis of those samples, gathered from mudstone yielded evidence that “Yellowknife Bay” had once been a part of an ancient lakebed environment which contained key chemical elements and a chemical energy source that long ago provided conditions favourable for microbial life.
Following their transfer to CHIMRA, the tailings cut from “Windjana” were sifted and graded in readiness for delivery to the ChemMin (Chemical and Mineralogical analysis) and SAM (Sample Analysis at Mars) suites of instruments, located in the body of the rover. The initial sample transfer to both instrument suites was made on May 15th PDT, 2014. and analysis of the samples should be carried out as the rover continues its journey towards the lower slopes of “Mount Sharp”.

Prior to departing “The Kimberley”, Curiosity carried out a final set of science operations. These involved using the turret-mounted MAHLI (Mars Hand Lens Imager) and spectrometer to examine the texture and composition of the cuttings from the sample drill hole in situ. The ChemCam laser was also used to vapourise some of the drill tailings on the surface of “Windjana” and rock from the inside of the sample hole itself, allowing the ChemCam to analyse the chemical composition of the resultant vapours.
The rover departed “the Kimberley” in the latter half of May, resuming its long trek – of which approximately half the distance has now been covered – from “Yellowknife Bay” to the point at which it is hoped the rover can traverse a range of sand dunes separating it from the lower slopes of “Mount Sharp”, its primary science destination.

NASA’s LDSD “flying saucer”
As NASA plans ambitious new robotic missions to Mars and aims itself towards future human missions to the Red Planet, the vehicles needed to land cargo safely on Mars are growing increasingly massive. This creates something of a problem for mission planners: the bigger the spacecraft, the harder it is to slow down as it descends through the Martian atmosphere.
While the vast majority of a vehicle’s velocity is reduced as a result of the friction generated during entry into the Martian atmosphere, it is still travelling at several times the speed of sound once it is inside the Martian atmosphere. Traditionally, most vehicles destined for the surface of Mars have then been slowed through a combined use of atmospheric drag and the use of parachutes, prior to retro-rockets being used in the final stage of touch-down. However, with a mass of one tonne, Curiosity stands at the limits at which a heavy vehicle can, by itself, generate enough initial drag in the upper reaches of the tenuous Martian atmosphere to counter its own mass and inertia and slow sufficiently in order for parachutes to be deployed safely it help slow the vehicle further prior to landing. If larger payloads – up to and including crewed vehicles – are to be landed safely on Mars, new means of slowing their descent must be found.
One way of potentially slowing inbound vehicles might be to use an inflatable decelerator. This could be relatively lightweight, and stowed safely away on the vehicle until after entry into the Martian atmosphere, Then, with the vehicle still travelling at between mach 3 or 4, the decelerator could be inflated around the vehicle, dramatically increasing the amount of atmospheric drag it creates and slowing it to around mach 2. At this point, special supersonic parachutes could be deployed, slowing the vehicle to subsonic speeds prior to retro-rockets being used to cushion the very last part of the landing.
Or at least, that’s the theory.
To test it, NASA is currently in the process of testing the Low-Density Supersonic Decelerator (LDSD) “flying saucer”. This is a large, saucer-shaped vehicle which will be hoisted up to an altitude of 37 kilometres (120,000) by balloon before being released to allow a rocket motor to lift it to 55 kilometres (180,000), where Earth’s atmosphere is about as dense as that of Mars. At this point, travelling at around four times the speed of sound, the motor will turn off, and with the vehicle flying sideways, the decelerator will inflate in an attempt to slow the craft to mach 2. If this is successful, then the supersonic parachute can be deployed, slowing the craft so that it makes a safe splashdown in the Pacific Ocean.

The LDSD is designed to test inflatable decelerators of 6 and 8 metres in diameter, which are seen as sufficient to deliver payloads of up to 3 tonnes to the surface of Mars. If successful, the system could be used on robot mission currently being planned for the 2020s. Larger versions of the system may also form a part of the EDL – Entry, Descent and Landing – systems on a crewed Mars lander, should NASA push ahead with plans to land humans on Mars in the 2030s.
Related Links
All images and video courtesy of NASA / JPL
