 Curiosity is once more moving forwards – by going backwards.
Curiosity is once more moving forwards – by going backwards.
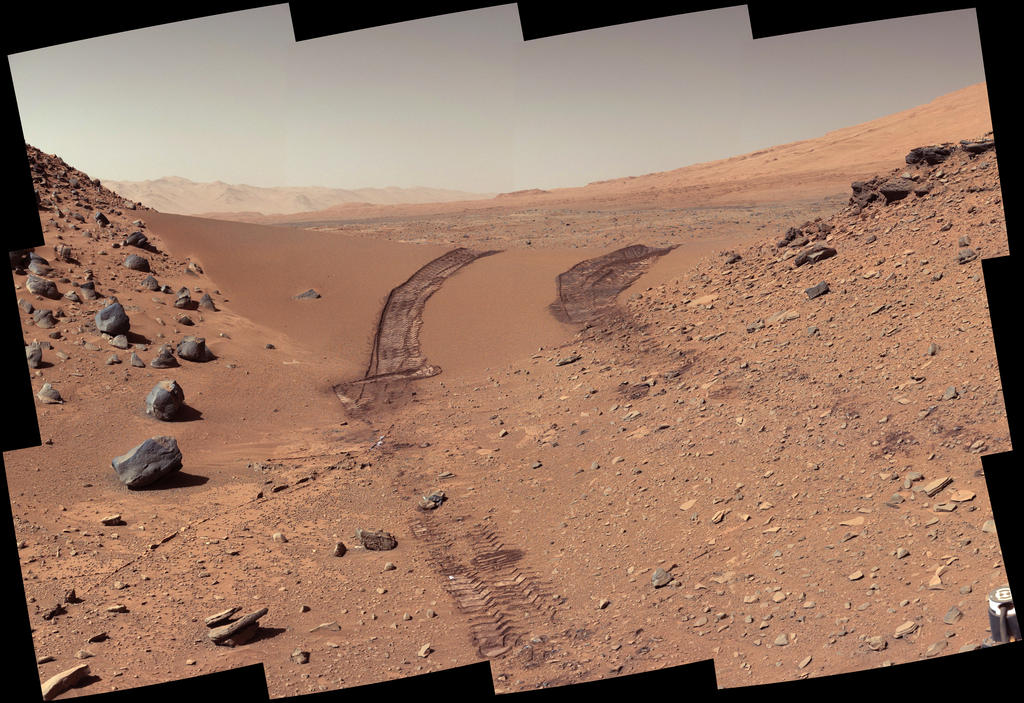
Since crossing the “Dingo Gap” sand dune, the rover has been on terrain dubbed “Moonlight Valley” which is far smoother than has been encountered in recent travels, exactly as the mission team would hope would be the case. Nevertheless, precautionary measures are still being used to offer Curiosity’s aluminium wheels some additional relief after a routine inspection of them revealed some had suffered much greater wear and tear than had been anticipated crossing some very rugged terrain.
While the damage to the wheels is not an immediate threat to the rover, mission planners were aware it could happen, and so have been considering various alternatives to minimise further undue wear. One of these alternatives involves the rover proceeding by driving backwards.
Theoretically, the design of the rover means that it can make forward progress either by driving with its front end (mounting the robot arm and science turret), or with its rear end, the large RTG cooling system, facing the direction of travel. However, the technique has never been fully tested on Mars, only having being tried over any significant distance using Curiosity’s Earth-based test bed twin; but with much smoother terrain now before the rover, mission managers were eager to discover how well Curiosity could drive when travelling backwards.
“We wanted to have backwards driving in our validated toolkit because there will be parts of our route that will be more challenging,” said mission Project Manager Jim Erickson at NASA’s Jet Propulsion Laboratory, Pasadena, California. To this end, on Tuesday February 18th, Sol 647 of the mission, Curiosity covered just over 100 metres (329 feet) whilst driving backwards, a traverse which was also the first long trek the rover has made in more than three months, bringing the total distance it has driven since arriving on Mars in August 2012 to some 5.21 kilometres (3.24 miles).

With the reverse driving now proven, Curiosity is set to resume its primary mission, which will see it make its way to an area previously referred to as “KMS-9”, comprising three different terrain / rock types offer a relatively dust-free area, and which has now been renamed “Kimberley” after a region in north-western Australia noted for its ancient, exposed rocks.
Following the February 18th drive, Curiosity faced a 1.1 kilometre curving trek to reach “Kimberley”. Once there, the rover will stop there to conduct further science activities, including gathering further rock samples using the turret-mounted drill. At the same time, mission managers will use orbital imagery to select the preferred route the rover will be instructed to take in order to continue onwards to its primary destination: the lower slopes of “Mount Sharp”.
“We have changed our focus to look at the big picture for getting to the slopes of Mount Sharp, assessing different potential routes and different entry points to the destination area,” Erickson said, commenting on the need to reassess the route. “No route will be perfect; we need to figure out the best of the imperfect ones.”

It is not clear how long the rover will remain at “Kimberley” once it arrives there; part of this decision will likely only be made once the rover have been able to survey the area for itself.
Images and video courtesy of NASA / JPL.










