 Since my last Space Sunday update, NASA’s Curiosity rover on Mars has experienced successes to overcome some setbacks, major and minor.
Since my last Space Sunday update, NASA’s Curiosity rover on Mars has experienced successes to overcome some setbacks, major and minor.
The major success came in the form of what amounts to “corrective eye treatment” for the rover’s famous laser system, which has been zapping rocks and soil hundreds of thousands of times in order to analyse the resultant plasma, and thus understand the chemical and mineral composition of the target material.
Called ChemCam, the Chemistry and Camera instrument, actually comprises a laser system and a telescope / camera connected to a spectrograph. The laser is in fact two systems in one, a primary laser, used to “shoot” targets and generate the plasma, and a smaller rangefinder laser used to accurately focus the telescope camera on the intended target. However, several months ago, this rangefinder laser suffered an unrecoverable failure.
Since that time, the ChemCam team have had to rely on taking multiple images of a target rock at multiple focal lengths in order to determine the best focal length the telescope should use when the main laser is set to fire.

The problem here is that the images had to be taken, transmitted to Earth and then assessed by a team of scientists to determine the best focal length setting for the telescope, which then had to be transmitted back to Curiosity, which then had to make the required focal adjustments. Only then could the main laser be successfully fired and accurate images for analysis obtained by the telescope. Obviously, all of this is a very protracted process compared to the rover being able to automatically focus the telescope directly.
However, as a part of a recent software upload to Curiosity, the international team responsible for ChemCam were able to install an update that has resorted Curiosity’s ability to auto-focus the ChemCam telescope. Now, instead of having to send a series of images to Earth for analysis, the rover can simply run the images taken at different focal lengths and then run them through an on-board algorithm which then selects the optimal focal length for the telescope, allowing the laser firing to proceed.
A series of test firings using the new software were carried out on Thursday, May 21st, and the results weren’t only positive – they indicated the new, software-driven auto-focus technique actually yields better quality results than the original method.
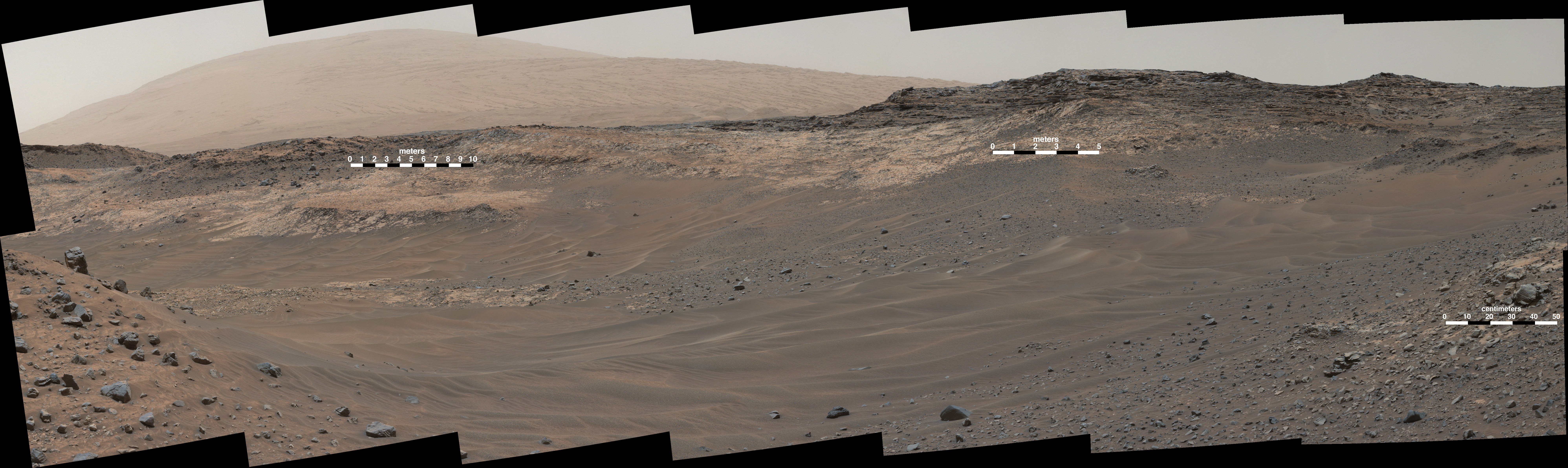
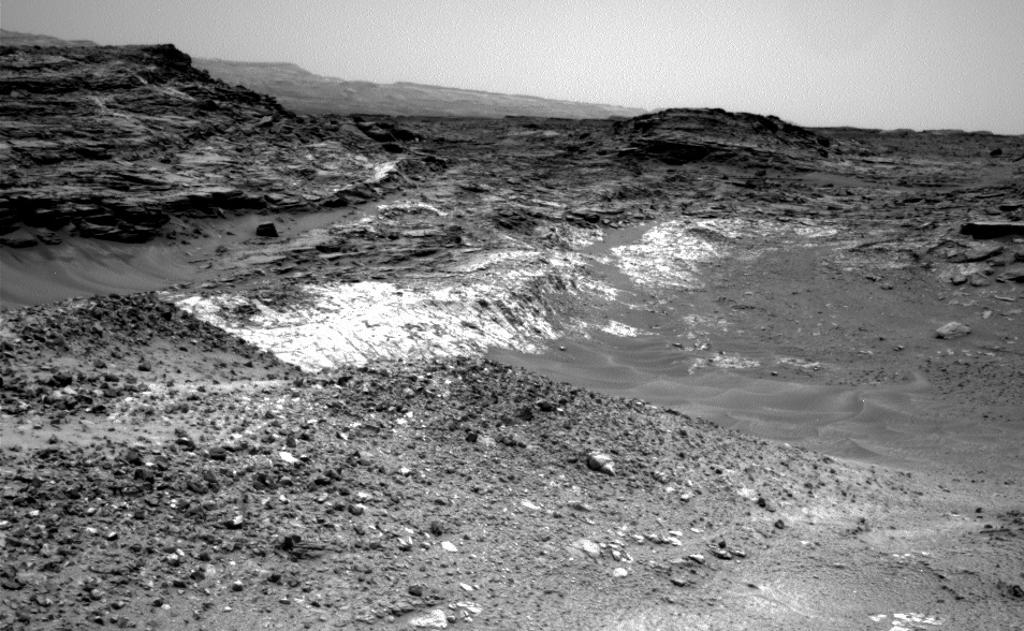
The second success for Curiosity actually has its origins provide to my last Space Sunday report. As indicated at that time, Curiosity was attempting to reach a point dubbed “Logan Pass”, an area sitting at the head of a series of shallow valleys and marked by the confluence of two different types of rock.
At the time of my last report, Curiosity had already been diverted from the original route selected for getting to the target. Images of the route revealed it in part comprised what NASA calls “polygonal sand ripples”, which can cause the rover to suffer extreme traction difficulties and wheel slippage. As a result, a decision was taken to attempt the ascent to the desired science location via slightly rougher terrain; it didn’t work out.
“Mars can be very deceptive,” said Chris Roumeliotis, Curiosity’s lead rover driver said of the attempt. “There appeared to be terrain with rockier, more consolidated characteristics directly adjacent to these ripples. So we drove around the sand ripples onto what we expected to be firmer terrain that would give Curiosity better traction. Unfortunately, this terrain turned out to be unconsolidated material too, which definitely surprised us and Curiosity.”
Two attempts to climb over this “unconsolidated material” (that’s loose rocks, pebble, sand, and dirt to you and me) came to an end when the rover experienced wheel slippage beyond acceptable limits, forcing the drive to stop. Coupled with indications of some sideways slippage – something the rover certainly doesn’t want to encounter lest it topple over – the decision was taken to reverse course and try an alternative route offering a way to another point at which the two rock formations meet and are both exposed.
On Thursday, May 21st, the rover successfully completed a climb up a 21-degree incline to reach a point overlooking an area where the two different strata of rock sit one atop the other, presenting an environment rich in scientific potential, and where the rover may spend some time engaged in investigations.
US Air Force “Mini-Shuttle” In Orbit Again
The space shuttle may now be a museum piece, but the United States is still flying space planes into orbit in the form of the tiny, uncrewed X-37B, operated by the US Air Force. I’ve reported briefly in the past on this clandestine space vehicle, not long after it had completed its third long-duration space flight lasting 675 days in orbit, and on Thursday May 20th, the system lifted-off from Cape Canaveral Air Force Station atop an Atlas V booster to start its forth mission in orbit.
How long this mission will last is unclear. However, up until now, flights undertaken by the vehicle have been of increasing length, starting with 225 days in space following the system’s first use in 2010/11, 469 days during the second mission (with the second X-37B) launched in March 2011, and the aforementioned 675 days in orbit during the third flight, launched in December 2012.

While the previous missions have been shrouded in secrecy, leading to speculation that the X-37B is part of a weapons testing system, some details of this flight have been revealed and are very much in keeping with the US Air Force’s claim that the X-37B is about testing technologies which might be used in future space vehicles. In this case the X-37B is, among other things, flying an advanced Hall thruster propulsion system (a sort of ion propulsion system which is gradually seeing more widespread use in things like communications satellites to help with their position-keeping in orbit). Also aboard the X-37B is a materials investigation project from NASA.
Sailing the Solar Wind
The Atlas V used to lift the X-37B into orbit also launched ten “CubeSats”into orbit as well, most notably the Planetary Society’s LightSail project.
CubeSats is a modular system which allows small, low-cost satellite systems to be put together relatively easily. Each module measures just 10 centimetres (4 inches) on a side, and they can be stacked together to create mini-satellites of varying complexity, which can incorporate solar power panels, communications capabilities, payload options, etc.
The LightSail project, funded entirely by public donations to the Planetary Society, comprises a stack of 3 CubeSats, making it roughly the size of a loaf of bread. But inside, it contains four Mylar solar sails, each just 4.5 microns thick, but when unfurled will cover an area of some 32 square metres (344 square feet).

Solar Sails are a long-held concept for capturing the solar wind – the outward flow of particles from the sun – and using them as a means of propulsion. It has been a staple of science-fiction for decades, and could offer a relatively cheap means of operating space vehicles across interplanetary space without the need to burden them with heavy payloads of fuel and engine systems. The force experted by the Sun in this way is not great, but it is cumulative; provide a big enough area of sail, and quite reasonable velocities could be achieved over time. It’s even been theorised that space-based lasers could be employed to provided focused beams of energy which could propel craft using solar sails from point to point around the solar system.
LightSail-1, as this mission is known, won’t test the propulsive capabilities of a solar sail. Instead, it is acting as a proof-of-concept for the sail deployment mechanism. Provided it does, it will pave the way in 2016 for a follow-up flight which will see the sail employed for solar sailing. Deployment of the lightSail-1 sail is due on May 24th / 25th, however, there are some concerns as to the status of the CubeSat following launch, due to telemetry received during the ascent to orbit.
The follow-up mission is due to be launched aboard a Space X mission slated for mid-2016. It will see a LightSail system lifted to an orbit some 720 kilometres (450 miles) above the surface of the Earth. LightSail will be paired with a Prox-1 “nano-satellite”, which will act as a monitoring station. Once in orbit, the Prox-1 satellite will release the LightSail, film the sail deployment process, and observe the sailing operations. Later in the mission, Prox-1 will rendezvous with the sail to carry out an inspection for any damage which may have occurred to the sail.
all images courtesy of NASA / JPL, unless otherwise indicated.

Thanks for the update Inara!
PS: just read about the “Pioneer Anomaly” – fascinating!
http://www.planetary.org/blogs/bruce-betts/3459.html
LikeLike
Yes, that certainly had a few scratching their heads at the time 🙂 . Glad you liked the update; never quite sure how the “spacey” thing goes down with people 🙂 .
LikeLike