Since my last Space Sunday update, NASA’s Curiosity rover on Mars has experienced successes to overcome some setbacks, major and minor.
Since my last Space Sunday update, NASA’s Curiosity rover on Mars has experienced successes to overcome some setbacks, major and minor.
The major success came in the form of what amounts to “corrective eye treatment” for the rover’s famous laser system, which has been zapping rocks and soil hundreds of thousands of times in order to analyse the resultant plasma, and thus understand the chemical and mineral composition of the target material.
Called ChemCam, the Chemistry and Camera instrument, actually comprises a laser system and a telescope / camera connected to a spectrograph. The laser is in fact two systems in one, a primary laser, used to “shoot” targets and generate the plasma, and a smaller rangefinder laser used to accurately focus the telescope camera on the intended target. However, several months ago, this rangefinder laser suffered an unrecoverable failure.
Since that time, the ChemCam team have had to rely on taking multiple images of a target rock at multiple focal lengths in order to determine the best focal length the telescope should use when the main laser is set to fire.

The problem here is that the images had to be taken, transmitted to Earth and then assessed by a team of scientists to determine the best focal length setting for the telescope, which then had to be transmitted back to Curiosity, which then had to make the required focal adjustments. Only then could the main laser be successfully fired and accurate images for analysis obtained by the telescope. Obviously, all of this is a very protracted process compared to the rover being able to automatically focus the telescope directly.
However, as a part of a recent software upload to Curiosity, the international team responsible for ChemCam were able to install an update that has resorted Curiosity’s ability to auto-focus the ChemCam telescope. Now, instead of having to send a series of images to Earth for analysis, the rover can simply run the images taken at different focal lengths and then run them through an on-board algorithm which then selects the optimal focal length for the telescope, allowing the laser firing to proceed.
A series of test firings using the new software were carried out on Thursday, May 21st, and the results weren’t only positive – they indicated the new, software-driven auto-focus technique actually yields better quality results than the original method.
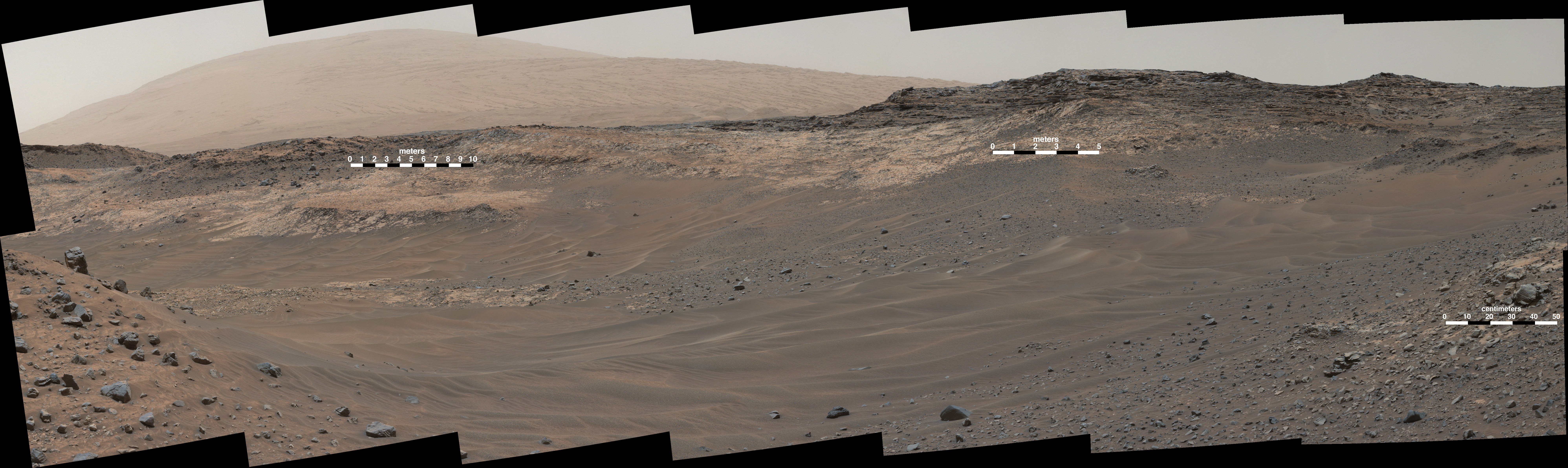
The second success for Curiosity actually has its origins provide to my last Space Sunday report. As indicated at that time, Curiosity was attempting to reach a point dubbed “Logan Pass”, an area sitting at the head of a series of shallow valleys and marked by the confluence of two different types of rock.
At the time of my last report, Curiosity had already been diverted from the original route selected for getting to the target. Images of the route revealed it in part comprised what NASA calls “polygonal sand ripples”, which can cause the rover to suffer extreme traction difficulties and wheel slippage. As a result, a decision was taken to attempt the ascent to the desired science location via slightly rougher terrain; it didn’t work out.
“Mars can be very deceptive,” said Chris Roumeliotis, Curiosity’s lead rover driver said of the attempt. “There appeared to be terrain with rockier, more consolidated characteristics directly adjacent to these ripples. So we drove around the sand ripples onto what we expected to be firmer terrain that would give Curiosity better traction. Unfortunately, this terrain turned out to be unconsolidated material too, which definitely surprised us and Curiosity.”
Two attempts to climb over this “unconsolidated material” (that’s loose rocks, pebble, sand, and dirt to you and me) came to an end when the rover experienced wheel slippage beyond acceptable limits, forcing the drive to stop. Coupled with indications of some sideways slippage – something the rover certainly doesn’t want to encounter lest it topple over – the decision was taken to reverse course and try an alternative route offering a way to another point at which the two rock formations meet and are both exposed.
On Thursday, May 21st, the rover successfully completed a climb up a 21-degree incline to reach a point overlooking an area where the two different strata of rock sit one atop the other, presenting an environment rich in scientific potential, and where the rover may spend some time engaged in investigations.
Continue reading “Space Sunday: of detours and sailing the solar wind”