 Following the announcement that Curiosity had found chemical and mineral signatures pointing towards Mars – or at the very least, Gale Crater – once being wet enough to create the right conditions in which micro-organisms may have once survived, the mission team has continued to analyse data returned by the rover over the last several weeks. In doing so, they have uncovered further evidence as to role of water in area during wet periods of Mars’ past.
Following the announcement that Curiosity had found chemical and mineral signatures pointing towards Mars – or at the very least, Gale Crater – once being wet enough to create the right conditions in which micro-organisms may have once survived, the mission team has continued to analyse data returned by the rover over the last several weeks. In doing so, they have uncovered further evidence as to role of water in area during wet periods of Mars’ past.
The most recent findings from the Mars Science Laboratory team was presented to the Lunar and Planetary Science Conference, being held in Texas, on March 18th, in which the team discussed the use of the infrared-imaging capability of the Mastcam system and the neutron-firing Dynamic Albedo of Neutrons (DAN) instrument to find further evidence of the hydration of minerals in the area.
Mastcam’s ability to capture infra-red images means it can be used as a mineral-detecting tool and as a means of observing hydration in surface rock features, where the ratio of brightness in images captured at different near-infrared wavelengths can indicate the presence of hydrated minerals. The technique was used to check rocks in the “Yellowknife Bay” area and has revealed some rock formations in the area to be crisscrossed with bright veins.

“With Mastcam, we see elevated hydration signals in the narrow veins that cut many of the rocks in this area,” said Melissa Rice of the California Institute of Technology, Pasadena. “These bright veins contain hydrated minerals that are different from the clay minerals in the surrounding rock matrix.” She went on to explain, “What Mastcam is seeing is water that is bound in the mineral structure of the rocks. This water is left over from a previous wet era and is now trapped and preserved in these hydrated minerals.”
The Russian-made DAN instrument on Curiosity detects hydrogen beneath the rover. At the rover’s very dry study area on Mars, the detected hydrogen is mainly in water molecules bound into minerals. “We definitely see signal variation along the traverse from the landing point to Yellowknife Bay,” said DAN Deputy Principal Investigator Maxim Litvak of the Space Research Institute, Moscow. “More water is detected at Yellowknife Bay than earlier on the route. Even within Yellowknife Bay, we see significant variation.”
Findings from the Canadian-made Alpha Particle X-ray Spectrometer (APXS) on Curiosity’s arm-mounted turret indicate that the wet environmental processes that produced clay at Yellowknife Bay did so without much change in the overall mix of chemical elements present, and confirmed the elemental composition of the outcrop Curiosity drilled into matches the composition of basalt, the most common rock-type on Mars. The APXS findings were initially affected by the dust layer common to most surfaces on Mars, which masked the basaltic signature of the rocks until the rover’s wire brush was used to scrub a section of rock clean of the dust.
“By removing the dust, we’ve got a better reading that pushes the classification toward basaltic composition,” Curiosity science team member Mariek Schmidt said. The sedimentary rocks at Yellowknife Bay likely formed when original basaltic rocks were broken into fragments, transported, re-deposited as sedimentary particles, and mineralogically altered by exposure to water.
During the conference in Texas, the science team indicated they’d initially discovered evidence for hydration within the rocks at “Yellowknife Bay” in January 2013, after the one-tonne rover crushed a rock under its wheel. The rock, dubbed “Tintina” revealed an interior similar in colour to the material obtained during the rover’s first drilling operation, and crossed by linear textures.

“This rock, Tintina, has a very strong hydration signal that corresponds to all that white material we see inside the rock. But that hydration signal doesn’t show up anywhere else in the image,” mission scientist Jim Bell reported, “The first time we tried to take the image, it saturated the detector, because we had no idea we’d have something so bright.” The science team believe that the bright material in Tintina and the bright veins imaged by the Matcam could be one in the same.
Taken together, these observations are revealing the history of water action in “Yellowknife Bay”, with the rocks initially being emplaced during a wet period in Mars’ past before being fractured and exposed to a second period of water flowing over and through them, leaving the mineral deposits behind. Thus, the emerging pictures appears to be one in which sediments were transported downhill from the eroding crater rim into a network of streams that then flowed into a lake environment represented by the mudstone drilled by Curiosity. As perviously noted in these reports, Curiosity has passed more than one sign that there was once streams of up to a metre deep flowing quite vigorously across the landscape.
Speaking to BBC News, Professor John Grotzinger, MSL’s Principal Investigator said, “What we’re really excited about is that this is the first time we’ve been able to follow through with a whole suite of different measurements that really demonstrate the place we found at Gale Crater was a very viable, habitable environment.”
He went on, “We really just landed in a terrific place where we are able to see the cross-sections of rocks and link things up pretty well to understand what the ancient environment was like. “We think it was some type of alluvial fan and we were very near the end of it, perhaps near a body of standing water like a lake or pond.”
Further Computer Glitch
On March 16th, Curiosity unexpectedly placed itself into its “safe” mode of operations after a file size mismatch error occurred as the “B-side” computer was reading a command file. The “safe” mode was triggered automatically by the rover’s protective software as a precautionary measure. Ordinarily, such a situation would cause the rover to swap-over to the redundant on-board computer system (in this case, the “A-side”) as a means of further identifying the cause of the error. However, as the “A-side” computer was still recovering from a recent glitch of its own, the switch-over did not take place.
The file size mismatch error was nowhere near as serious as the A-side computer fault, however, and engineers saw it more of a matter of routine to correct, rather than anything of major impact. Even so, the rover remained in “safe” mode until the 19th March, while both computers were checked-out, and the “A-side” computer was recovered to a point where it could once more operate as a back-up to the “B-side” computer, should further problems occur with the latter. At the same time, corrective action for the root cause of the March 16th glitch was taken to prevent its recurrence, prior to the computer being commanded to bring itself out of the “safe” mode.
Communications Moratorium – Solar Conjunction
Currently, the rover is going through a series of final check-out operations, such as manipulating its robot arm, prior to resuming full science operations, which is expected to occur later in the week. Once full operations are resumed, the two priority items for the mission team will be to complete further sample-analysis science and to prepare the rover for a moratorium on transmitting commands to Curiosity throughout most of April, during a period of solar conjunction.

Solar conjunction occurs when another body – in this case Mars – is on the opposite side of the Sun relative to the Earth. During such periods, which can last between two and four weeks, communications between Earth and vehicles operating on and around Mars are severely disrupted / curtailed due to interference from the Sun, so NASA effectively places all of their Mars missions on “autopilot” during the period of conjunction.
To prepare for this, the mission team will be uploading a series of commands to Curiosity over a period of two or more days, in order to allow the rover to continue to operate with little / no oversight from mission control at JPL. This work has to be completed prior to April 4th, when the communications moratorium is expected to begin, and is expected to last some four weeks.
Raw, Natural and White Balance
In the MSL reports presented in this blog, many images have been annotated as being “white balanced” for lighting, the idea being that the images have been filtered via computer so that they would appear as if seen by the human eye under normal Earth daylight lighting conditions. The technique is used because it helps make features easier to identify, and so assists in making decisions on operating the rover, such as selecting preferred drive routes, identifying rock formations for detailed study, etc.
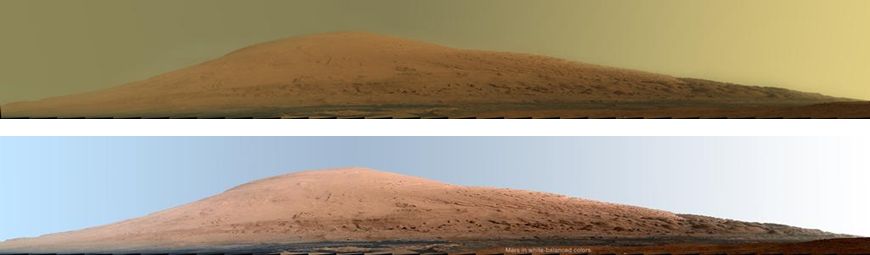
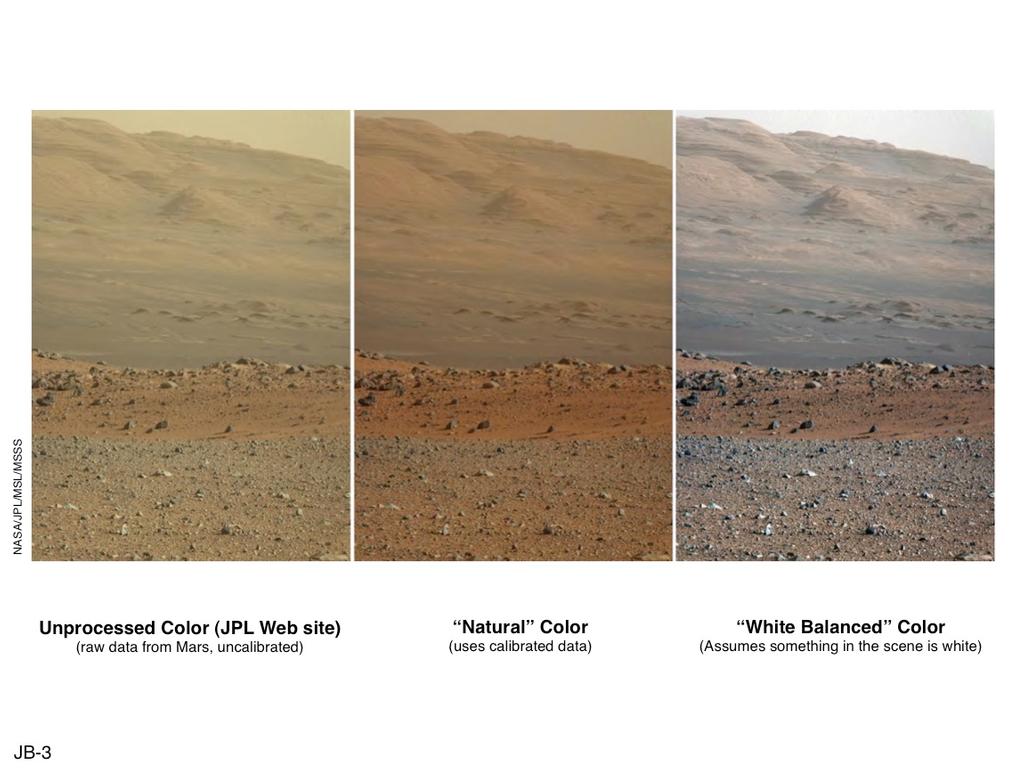
Alongside of “white balanced” images are two other categories of image – “raw” and “natural”. The former, as indicated in the image above, and as sometimes presented in the MSL reports in these pages, are unprocessed images as returned directly from Curiosity as “seen” by its onboard colour imaging systems.
“Natural” images sit between “raw” and “White balanced” images, in that they have been calibrated to show Mars pretty much as the human eye would see them, were we able to stand on the surface of the planet in “normal” Martian daylight. The three different type of image can be see together in the image below, showing the slopes of “Mount Sharp”, as imaged by Curiosity’s Mastcam on Sol 19 of the mission (August 23rd, 2012).
Related Links
All images courtesy of NASA / JPL
