It’s been a month since my last MSL update, so I’m lagging badly; however, mission news coming out of JPL has been a little lax, so I’m not too far behind the times.
Following my lastCuriosity report, drilling and sample-gathering in the area dubbed “The Kimberley” has been completed, and the rover is once more on the move, heading west before turning more to the south once more.
The drilling / sampling operation took place on Sol 621 (Monday May 5th, PDT, 2014), with the percussion drill mounted on the rover’s robot arm turret cutting a hole some 6.5 centimetres (2.6 inches) deep and 1.6 cem (0.63 in) across into a flat sandstone slab which had been dubbed “Windjana” shortly after Curiosity arrived in “The Kimberley” at the end of March 2014. The tailings gathered as a part of the drilling operations were delivered to the CHIMRA (Collection and Handling for In-Situ Martian Rock Analysis) system, in preparation for them to be transferred to the rover’s on-board science laboratory. Confirmation that the sample-gathering had been successful came early in the morning (PDT) on Tuesday May 6th.
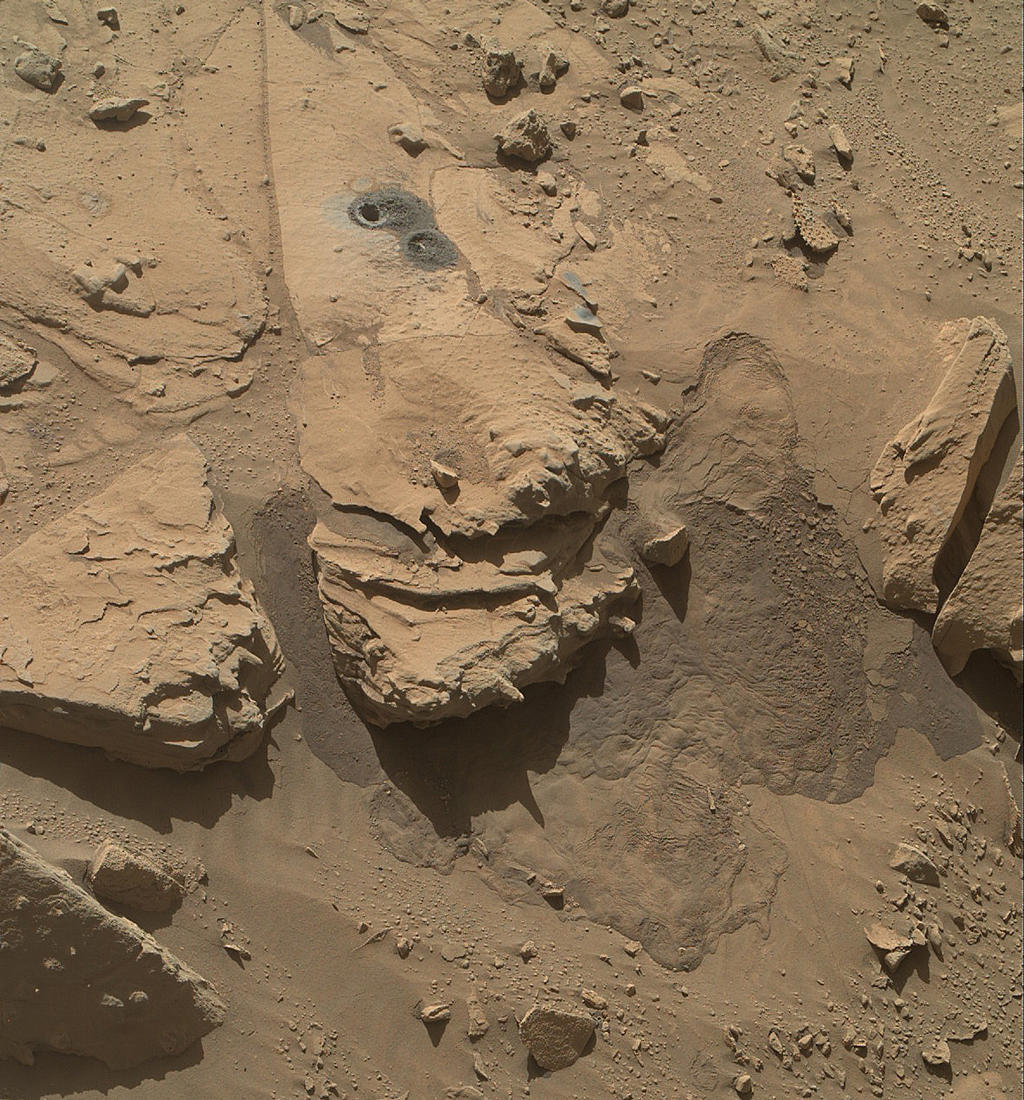
Holey moley. An image captured by the Mars Hand Lens Imager (MAHLI) Curiosity’s robot arm turret on Sol 627 (May 12th PDT, 2014) showing the sample gathering hole cut into “Windjana”. Dark tailings from the operation lay around the hole and have partially filled the test drilling hole just below it. The two patches of grey visible slightly to the right and blow the drill holes mark the points where Curiosity’s ChemCam laser was used to vapourise dust covering the surface of the rock. Surface material around the rock was subjected to miniature “landslides” as a result of the percussive hammering of the drill (click to enlarge)
The drilling operation, the third time Curiosity has gathered samples from inside a Martian rock for analysis, has caused some excitement among the mission team. “The drill tailings from this rock are darker-toned and less red than we saw at the two previous drill sites,” Jim Bell, deputy principal investigator for Curiosity’s Mast Camera (Mastcam) said after the drilling operation. “This suggests that the detailed chemical and mineral analysis that will be coming from Curiosity’s other instruments could reveal different materials than we’ve seen before. We can’t wait to find out!”
Curiosity’s first two drilling operations took place over a year ago in the “Yellowknife Bay” area of Gale Crater, some four kilometres (2.5 miles) north-east of “The Kimberley”. Analysis of those samples, gathered from mudstone yielded evidence that “Yellowknife Bay” had once been a part of an ancient lakebed environment which contained key chemical elements and a chemical energy source that long ago provided conditions favourable for microbial life.
Following their transfer to CHIMRA, the tailings cut from “Windjana” were sifted and graded in readiness for delivery to the ChemMin (Chemical and Mineralogical analysis) and SAM (Sample Analysis at Mars) suites of instruments, located in the body of the rover. The initial sample transfer to both instrument suites was made on May 15th PDT, 2014. and analysis of the samples should be carried out as the rover continues its journey towards the lower slopes of “Mount Sharp”.
A composite of eight shots from MAHLI showing successive dot-like strikes from the ChemCam laser, both within the sample drilling hole at “Windjana” and where the tailings have mixed with surface dust (top right). Such strikes allow the chemical composition of the dust and rock to be analysed (click to enlarge)
Prior to departing “The Kimberley”, Curiosity carried out a final set of science operations. These involved using the turret-mounted MAHLI (Mars Hand Lens Imager) and spectrometer to examine the texture and composition of the cuttings from the sample drill hole in situ. The ChemCam laser was also used to vapourise some of the drill tailings on the surface of “Windjana” and rock from the inside of the sample hole itself, allowing the ChemCam to analyse the chemical composition of the resultant vapours.
Thursday May 28th saw SpaceX, the private sector space company founded by Elon Musk, unveil the next iteration of their Dragon space vehicle, the Dragon V2.
Dragon has been in operation in an unmanned mode since 2010, and was the first commercially built and operated spacecraft to be recovered successfully from orbit. In May 2012, it commenced uncrewed resupply flights to the International Space Station (which I covered here) as a part of NASA’s Commercial Orbital Transportation Services (COTS) development programme.
Elon Musk unveils the Dragon V2 capsule, May 29th, 2014 (image: SpaceX)
Dragon V2 (which had previously been called Dragon Rider by the company) is a natural progression of the Dragon spacecraft, and while always in Spacex’s plans, having been originally announced in 2006, it has been part-funded by two US Government contracts, the Commercial Crew Development 2 (CCDev 2) in April 2011, and the Commercial Crew integrated Capability (CCiCap) in August 2012, both of which are focused on developing crewed vehicles capable of supporting the International Space Station (ISS) and of operating in low Earth orbit (LEO).
Dragon V2 is capable of carrying up to seven crew, or a combination of crew and cargo. The vehicle is intended to be reusable, and capable of landing almost anywhere in the world using propulsive-landing via its eight SuperDraco engines (Dragon 1 is only capable of making splash downs). However, Dragon V2 will retain a parachute descent system for use as a back-up, although it can still make a safe touch-down even if two of its eight descent engines fail. Also, unlike Dragon 1, which makes a close rendezvous with the ISS before being grabbed by one of the station’s robot arms and manoeuvred into a docking position, Dragon 2 will be able to undertake fully automated dockings with the ISS.
Dragon 2 making a control landing, post-mission (image: SpaceX)
Nor does it end there. There are some ambitious plans for Dragon. The head shield, for example, is already capable of protecting the vehicle during re-entry into the Earth’s atmosphere at velocities equivalent to those of a vehicle returning from the Moon or from Mars – and SpaceX has been working with NASA Ames Centre, California, on a conceptual uncrewed Mars mission evolution called Red Dragon.
Artist’s visualisation of how Red Dragon might appear when landing on Mars were the project to go ahead (image: SpaceX)
Potentially funded under NASA’s Discovery mission programme, Red Dragon, if given the green light, would provide a cost-effective means for NASA to undertake a sample return mission to Mars, allowing up to two tonnes of samples to be returned to Earth for detailed investigation and analysis in 2022, ahead of NASA’s goal of sending humans to Mars in the 2030s.
Other have even more ambitious plans for Dragon and Mars. Dutch-based Mars One plans to kick-start a permanent, self-sufficient human colony on Mars from the mid-2020, with crews leaving Earth on a one-way trip every two years. According to the Mars One website, they hope to be able to use the Dragon vehicle and its associated Falcon 9 heavy launch vehicle also constructed by SpaceX, although there has been no public confirmation as to whether formal discussions with SpaceX have taken place.
Such plans aside, however, the first actual crewed mission for Dragon V2 is unlikely to occur prior to 2016. The next major milestone for the vehicle is a launchpad abort test, scheduled for later in 2014.
This will see the vehicle positioned at pad height and then launched to simulate an emergency in which the crew must escape their launch vehicle. After this, in 2015, there should be a high altitude abort test at Max Q, the period in the vehicle’s ascent when it is exposed to the maximum dynamic pressure. Both tests will feature the use of the vehicle’s SuperDraco engines, which form a part of the escape system as well as powering the craft during descent and landing. Capable of multiple re-starts and what is called “deep throttling”, the engines are themselves unique – the first ever fully printed rocket engines ever flown, produced by a direct metal laser sintering process.
If both of these tests are successful then it is conceivable that Dragon V2 could make an initial uncrewed orbital flight towards the end of 2015, and its first crewed flight in 2016.
Curiosity has resumed its long drive towards the point where it can begin its examination of the huge mound sitting at the centre of Gale Crater which NASA has dubbed “Mount Sharp” (its official name is Aeolis Mons).
The rover recently stopped-off at an area dubbed “Waypoint 1”, the first of several potential stop-over points on the rover’s route, where it will carried out various studies of the surroundings.
Curiosity departed the area on September 22nd after spending some 10 days examining rocks at “Waypoint 1”, and is once more travelling slowly but steadily towards the point mission managers have identified for it to bypass a dune field lying between it and “Mount Sharp”. Along the way, it is liable to make around four more stops.
While at “Waypoint 1”, the rover spent time examining a rocky outcrop dubbed “Darwin”, using a range of instruments to gather images and data which again showed that Gale Crater was once the scene of considerable water activity.
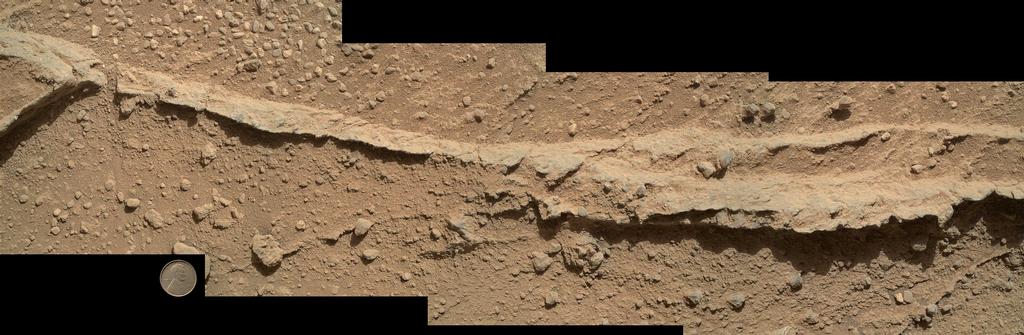
A mosaic of four images taken by the Mars Hand Lens Imager (MAHLI) camera shows detailed texture in a ridge on the rock outcrop dubbed “Darwin” the rover studied at “Waypoint 1”. The images were obtained shortly before sunset Sol 400 (Sept. 21, 2013) with the camera 25 cm (10 inches) from the rock. Scale is indicated by the Lincoln penny from the MAHLI calibration target, shown beside the mosaic.
“We examined pebbly sandstone deposited by water flowing over the surface, and veins or fractures in the rock,” said Dawn Sumner of University of California, Davis, a Curiosity science team member with a leadership role in planning the stop. “We know the veins are younger than the sandstone because they cut through it, but they appear to be filled with grains like the sandstone.”
While much of the outcrop was covered in the all-too-familiar oxidised Martian dust, there were a patches of bare rock scattered across its surface in which sand deposits and pebbles could be seen, and it was these that drew the attention of the science team.
A mosaic of nine images, taken by the MAHLI camera, shows detailed texture in a conglomerate rock bearing small pebbles and sand-size particles. Again, these images were captured on Sol 400 (Sept. 21, 2013) with the camera positioned about 10 cm (4 inches) from the rock. Scale is indicated by the Lincoln penny from the MAHLI calibration target, shown beside the mosaic.
Following extensive studies of the outcrop, the science team interpret the sand and pebbles in the rock as material that was deposited by flowing water, then later buried and cemented into rock, forming conglomerates. Research will now focus on the textures and composition of the conglomerates as Curiosity continues onward, to understand its relationship to stream bed conglomerate rock found closer to Curiosity’s landing site. Doing so, together with studies to be undertaken at the remaining waypoints, should help scientists to piece together the relationship between rock layers at “Yellowknife Bay” where the mission found evidence of an ancient freshwater-lake environment favourable for microbial life, and the rock layers at the main destination on lower slopes of “Mount Sharp”.
Water, Water, Everywhere
On September 27th, the Curiosity team published five reports in the journal Science which discuss the mission’s findings during the first four months of the rover’s time on Mars. A key finding from this work is that water molecules are bound to fine-grained soil particles, accounting for about 2 percent of the particles’ weight at Gale Crater. This result has global implications, because these materials are likely distributed around the Red Planet.
The presence of water was discovered as a result of samples of surface material being heated to the point of vapourisation within a small oven inside Curiosity – and the most abundant vapour detected was H2O. The quantity of water molecules bound-up in the Martian soil suggest that as much as two pints of water could be obtained through the heating of one cubic foot of Martian dirt.
This discovery potentially has major implications for any long-term human presence on Mars in the future. The water – once subjected to appropriate treatment to remove unwanted minerals, such as a perchlorate, which has also been found in small amounts within Martian soil samples and can interfere with the thyroid function – could be used for cleaning and drinking purposes. It could also be electrolysed and used in the creation of oxygen and hydrogen. The hydrogen could then be used for a variety of purposes, including as a raw fuel, or in the production of fuel in the form of methane (created by combining the hydrogen with carbon dioxide from the Martian atmosphere), which could be used with oxygen to power surface vehicles.
An interesting part of the study is that the analysis of the chemicals and isotopes in the gases released during the analysis of soil samples indicates that the water molecules are the result of an interaction between the soil on Mars and the current atmosphere of the planet; so the process of depositing the water molecules is ongoing, rather than the result of some past mechanism. Even the discovery of perchlorate in the samples is of significance; previously, this had only been found in soil samples examined at the high latitude Phoenix Lander site. That they’ve now also been found in a near-equatorial latitude suggests they have a global distribution as well.
The other papers released by the science team further confirm earlier studies into the mineral composition of samples gathered and studied during the rover’s initial four months on Mars using its full suite of sample analysis tools: MAHLI, APXS, ChemCam, SAM, and CheMin, all of which can perform a range of complementary as well as disparate analyses.
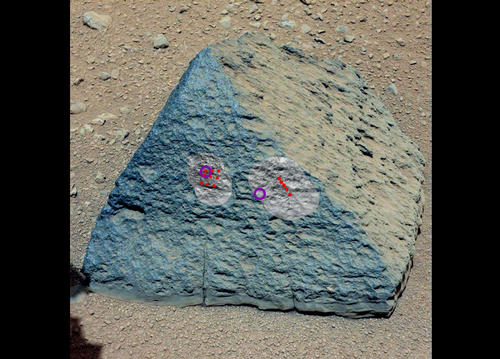
One of the papers additionally focuses on a rock I covered back in the early days of the mission – Jake_M. Named in memory of NASA / JPL engineer Jacob Matijevic, who worked on all three generations of NASA’s Mars rovers and who passed away shortly after Curiosity arrived in Gale Crater, Jake_M was thought to be quite unlike any other rock on Mars – not because of its pyramid-like shape, but because of its composition.
“Jake_M”, the remarkable rock examined by Curiosity on September 22nd 2012, and believed to be a mugearite type of rock. The markings show where ChemCam and APXS were used to examine it
The paper published in Science confirms that Jake_M is most like a mugearite, a type of rock found on islands and rift zones on Earth.
On August 25th 2012, while the eyes of the global space community were focused almost entirely on the happenings in a crater on Mars, a significant event took place approximately 18 billion kilometres (11 billion miles) from Earth. Voyager 1 passed through the heliopause, the boundary between what is regarded as the “bubble” of space surrounding the solar system (heliosphere) which is directly influenced by the Sun, and “true” interstellar space.
The heliosphere and its component elements
That the spacecraft might be nearing the so-called “bow shock” area where the solar wind meets interstellar space was indicated by engineers and scientists working on the Voyager project in June 2012; however, it was not until September 2013 that NASA JPL felt confident enough in the data they’d received to confirm that Voyager 1 had in fact passed into interstellar space in August 2012, the first man-made object to have done so, some 35 years after having been launched from Earth in what was a highly ambitious programme of deep-space exploration.
The Voyager programme actually had its roots in a much more ambitious programme, the so-called Grand Tour. First put forward by NASA engineer Gary Flandro, The Grand Tour proposed the use of a planetary alignment which occurs once every 175 years, together with the potential to use the gravities of the planets as a means by which space probes could explore the outer planets of the solar system.
The idea of using gravity of the planets to help propel a space craft had first been realised by a young mathematician, Michael Minovitch, in 1961. With the aid of the (then) fastest computer in the world, the IBM 7090, Minovitch had been trying to model solutions to the “three body problem” – how the gravities of two bodies (generally the Earth and the Sun) influence the trajectory and velocity of a third (generally a comet or asteroid) moving through space; something astronomers and mathematicians had long wrestled with.
The men behind Voyager: Michael Minovitch (l), circa 1960; Gary Flandro (c), circa 1964; and Ed Stone (r), the project scientist and long-time advocate of the mission, circa 1972 (Stone later went on to serve as NASA’s Director at JPL)
Through his work, Minovitch showed how an object (or space vehicle) passing along a defined trajectory close to a planetary body could, with the assistance of the planet’s gravity, effectively “steal” some of the planetary body’s velocity as it orbited the Sun, and add it to its own.
At the time, his findings were received with scepticism by his peers, and Minovitch spent considerable time and effort drawing-up hundreds of mission trajectories demonstrating the capability in order to try to get people to accept his findings. But it was not until 1965, when Flandro started looking into the upcoming “alignment” of the outer planets (actually a case of the outer planets all being on the side of the Sun, rather than being somehow neatly lined up in a row) due in the late 1970s, that Minovitch’s work gained recognition.
Recognising the opportunity presented by the alignment, Flandro started looking at how it might be used to undertake an exploratory mission. In doing so, he came across Minovitch’s work and realised it presented him with exactly the information needed to make his mission possible, and so the Grand Tour was born.
Voyager: the most prominent element of the vehicle is the communications dish; below and to the left of this is the nuclear RTG power source; extending out to the top left is the instrument boom, and to the right the imaging boom and camera system
This mission would have originally seen two pairs of spacecraft launched from Earth. The first pair, departing in 1976/77 would form the MJS mission, for “Mariner (then the USA’s most capable deep-space vehicle)-Jupiter-Saturn”. These would fly by Jupiter and Saturn and then on to tiny Pluto; while a second pair of vehicles launched in 1979 which would fly by Jupiter, Uranus and Neptune.
Budget cuts at NASA following Apollo eventually saw the Grand Tour scaled-back to just two vehicles, Voyager 2 and Voyager 1, but the overall intent of the mission remained intact under the Voyager Programme banner, now led by Ed Stone. In the revised mission, both spacecraft would perform flybys of Jupiter and Saturn, with Voyager 2 using Saturn to boost / bend it on towards Uranus and from there on to Neptune, while Voyager 1 would approach Saturn on a trajectory which would allow it to make a flyby of Saturn’s huge Moon Titan, of significant interest to astronomers because of its thick atmosphere. This route would preclude Voyager 1 from reaching Pluto, as it would “tip” the vehicle “up” out of the plane of the ecliptic and beyond even Pluto’s exaggerated orbit around the Sun, and push it onto an intercept with the heliopause.
As I’ve previously posted here on occasion, and as friends on Twitter will know, I has a soft spot for space exploration. Last year I wrote some pieces about the space shuttle Endeavour, and included some favourite images of her prior to her final return to Earth.
Endeavour and the shuttle fleet have now gone; retired to museums and their missions confined to history. However, the last week or so saw the opening of a new chapter in low-Earth orbit space operations as the Dragon space vehicle, developed by Internet entrepreneur Elon Musk’s SpaceX Corporation, became the first privately funded vehicle to dock with the ISS under NASA’s Commercial Orbital Transportation Services programme.
May 22nd 2012: Dragon lifts-off atop SpaceX’s own Falcon 9 launch vehicle (image: SpaceX)
First flown in 2010, the Dragon space vehicle was put through its paces during May 2012 in an aggressive mission to demonstrate its core capabilities of launching a payload to orbit, rendezvousing with the ISS, where it would be captured by a robotic arm on the station and manoeuvred into a hard dock for cargo transfer, before returning to Earth with a payload from the station (in this case, 590 kilos of items, including “quick return” packages intended to demonstrate that SpaceX could return time-critical experiments from the ISS and deliver them to NASA within 48 hours of the Dragon vehicle detaching from the station).
Dragon is designed to be a highly versatile workhorse vehicle, capable of delivering some 3,310kg of cargo to the ISS and returning up to 2,500kg safely to Earth. What’s more the vehicle’s heat shield is designed to withstand re-entry velocities from possible lunar and Mars missions.
Russia’s Progress (l), Europe’s ATV (c) and Japan’s HTV (r)
The ability to make a return to Earth places Dragon is a league of its own compared to the other cargo vehicles currently operating to resupply the ISS. The Russian Progress vehicle, European ATV and Japan’s HTV all burn-up in the upper reaches of the Earth’s atmosphere after departing the space station.
Nor will Dragon be limited to cargo flights: development is under way of the DragonRider variant – a vehicle capable of lifting up to seven people to / from the ISS. Two further variants of the vehicle are under development: DragonLab, which will see the vehicle operate commercially on its own as an unmanned orbital research platform, with full return-to-Earth capabilities; and RedDragon, which has been proposed as a NASA Discovery mission slated for 2018, which would see a modified version of the unmanned Dragon fly to Mars and deliver a 1-tonne payload to the surface in order to try to sample subsurface water reservoirs.
Dragon approaching the ISS, May 25th 2012 (NASA)
Dragon was launched on its initial COTS mission on May 22nd, 2012. Once successfully in orbit, it commenced a 2-day “chase and rendezvous” flight with the ISS, gradually easing its way up to the space station, where it performed a series of check-out manoeuvres, prior to making its final approach to the station ready for capture and docking on May 25th.
The ISS captured by Dragon’s thermal camera prior to final rendezvous and capture (SpaceX)
Rather than docking directly with the station, as with the likes of the Shuttle, Progress and Europe’s ATV, Dragon gently manoeuvres up close to the station prior to a robotic arm on the ISS itself being used to “grab” the vehicle and then gently ease it into a berthed positioned against the station’s Harmony module.
May 25th capture: “Houston, we have a Dragon by its tail!” Astronaut Don Petit reported upon successfully grappling the vehicle with a robot arm (NASA)
Once successfully docked, Dragon spent several days mated to the ISS while the station crew off-loaded some 460kg of food, water and other items, then packed the vehicle with 560kg of equipment and items for the return to Earth.
Docked! (NASA)
Return operations commenced on May 31st, when the robot arm was used to detach Dragon from the ISS and move it to a distance of some 10 metres before releasing it. Manoeuvring thrusters then gently backed the vehicle away from the ISS prior to it commencing a series of manoeuvres that moved it ahead of the station by a few hundred kilometres, and started the de-orbit process.
Departure (NASA)
After successfully re-entering the Earth’s atmosphere, the main capsule having been detached from the orbital “trunk” of the craft, Dragon safely deployed its parachutes and splashed-down on-target a little under 900 kilometres off the coast of California, where it was recovered by waiting support ships, bringing the flight test phase of the mission to a successful conclusion.
A Dragon in the water (SpaceX)
Dragon is due to fly to the ISS once more in September 2012 in the first official Cargo Resupply Mission, which will see it carry a full load into space. This will be followed in October by Orbital Science’s Cygnus vehicle (which, like Progress et al, is designed to burn-up on re-entry), to mark the further expansion of the COTS programme.
Orbital Sciences’ Cygnus vehicle
For now, however, all eyes remain on SpaceX and their remarkable – and potentially highly versatile – Dragon vehicle; here’s to a successful mission in September! In the meantime, I’ve put together a little slideshow of images from NASA and SpaceX images highlighting the mission.
 It’s been a month since my last MSL update, so I’m lagging badly; however, mission news coming out of JPL has been a little lax, so I’m not too far behind the times.
It’s been a month since my last MSL update, so I’m lagging badly; however, mission news coming out of JPL has been a little lax, so I’m not too far behind the times.