On Wednesday February 27th, after some 200 days of near-flawless operations on Mars, Curiosity had its first major malfunction. Up until that point, the rover had been operating using one of its two on-board computers – the so-called “A-side”, to process all command instructions and manage its activities on Mars.
The problem was first noticed by mission planners when the rover failed to send any recorded information during routine uplinks to Earth, instead only sending current status information. On examination, this data revealed the computer had failed to enter its usual “sleep mode” as planned during the overnight period on Mars. Diagnostic work using one of the test rigs at JPL indicated that the problem appeared to be a corruption in the A-side computer’s flash memory module.
As a result of this finding, all science work on the rover – including the analysis of samples obtained from inside the “John Klein” bedrock were suspended on Thursday February 28th, as the rover was instructed to switch-over to the “B-side” computer, which was powered-up into a “safe mode” of operation in order that the rover’s functions could be maintained while investigations as to the cause of the corruption on the A-side could be further investigated.
“We switched computers to get to a standard state from which to begin restoring routine operations,” Richard Cook, project manager for the Mars Science Laboratory Project at JPL, commented at the time of the switch-over.
Mars Odyssey: swapped computer “sides” in November 2012
Memory corruptions aboard space vehicles are not uncommon, so the majority of NASA’s space missions carry redundant computer configurations. Corruptions can be the result of several things; recently, for example, the Mars Odyssey orbiter vehicle had to switch-over from its “A-side” to its “B-side” due to 11 years of constant operation finally taking its toll on the “A-side”; wearing it out. High-energy solar and cosmic ray strikes can also cause problems, even when the vehicle is shielded (as Curiosity is).
What made the problem with the MSL rover critical is that it occurred with the memory module which acts as the “table of contents” for accessing the computer’s memory, preventing data and instructions from being accessed and causing the computer to enter into an “endless loop”.
Also commenting on the switch-over, Magdy Bareh, leader of the mission’s anomaly resolution team at JPL said, “While we are resuming operations on the B-side, we are also working to determine the best way to restore the A-side as a viable backup.”
Mission managers have confirmed that Curiosity has “ingested” samples gathered from inside the rock dubbed “John Klein” and is now analysing them.
As reported last time around, the sample gathered by the rover’s turret-mounted drill has been used to clean the drill’s internal sample-handling mechanism. Originally, it had been thought the material might be dumped after this work, and a fresh sample obtained for analysis. However, concerns about the very long-term security of a filter required for processing samples meant the decision was taken to use the sample both for clean activities and for delivery to the on-board Chemistry and Mineralogy (CheMin) and Sample Analysis at Mars (SAM) science instruments.
Prior to delivery, the sample was processed by CHIMRA, the Collection and Handling for In-Situ Martian Rock Analysis system, also mounted in the turret at the end of the robot arm. This comprised vibrating the entire turret so that material of 150-microns or smaller could be deposited into a sample delivery mechanism which would then transfer small amounts to both CheMin and SAM over a two-day period.
The first delivery of a sample of the powder obtained from inside “John Klein”, equivalent to around half as much material as in an aspirin tablet, was made to CheMin on Sol 195 (February 22nd). Then, on Sol 196, a sample of equal size was delivered to SAM.
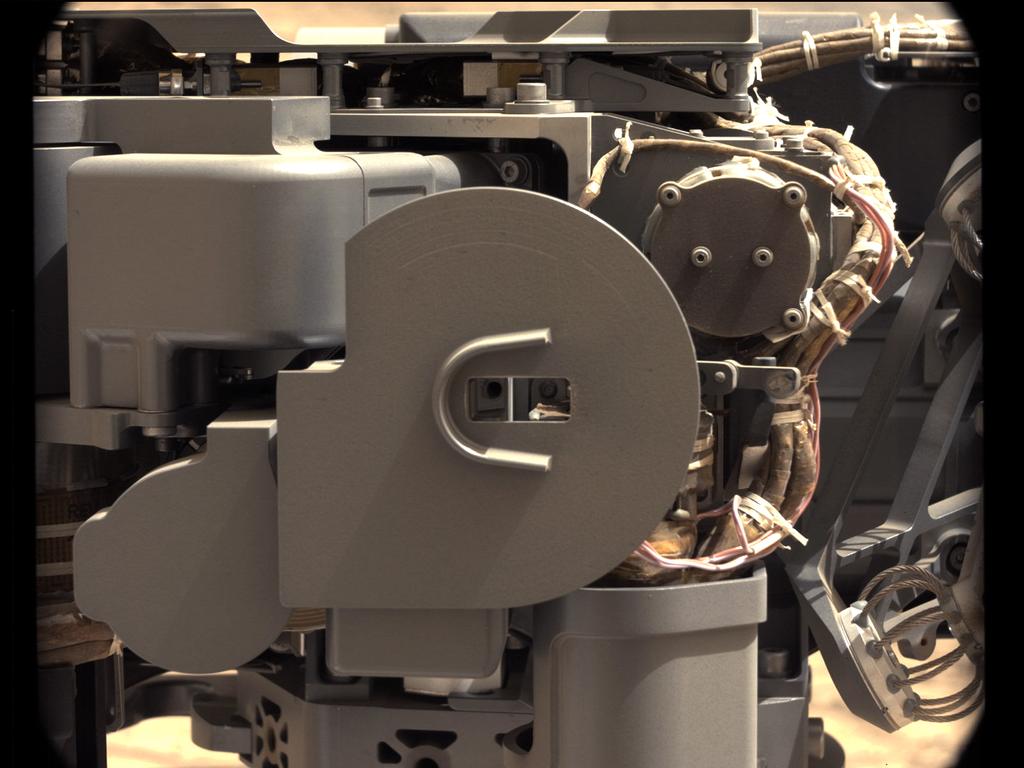
The left Mast Camera (Mastcam) took this image of Curiosity’s sample-processing and delivery tool just after it had delivered a portion of powdered rock to SAM on Sol 196. Mounted on CHIMRA, the portion delivery tube can be seen in the centre of the image, surrounded by a C-shaped windshield. The opening is about 4mm (0.16 inch) in diameter. Portions containing about half as much material as in an aspirin tablet were dropped through that opening into CheMin and SAM. This image was taken to check whether sample material remained in the tube opening after portion delivery, and has been white-balanced to show the scene under natural daylight on Earth.
“Data from the instruments have confirmed the deliveries,” said Curiosity Mission Manager Jennifer Trosper, of NASA’s Jet Propulsion Laboratory, following the successful transfers to both instruments. The samples will now be subjected to a range of on-board tests using CheMin’s X-ray diffraction instrument, a process which generally takes a minimum of 10 hours and according to mission notes can be spread out over two or more consecutive Martian nights, and well as by the suite of instruments which comprise SAM.
Please use the page number below to continue reading this article
Curiosity is continuing to work towards the delivery of samples obtained from inside a rock dubbed “John Klein” to the onboard Chemical and Mineralogy (CheMin) and Sample Analysis at Mars (SAM) suites of instruments aboard the rover itself.
As reported in my last update, Curiosity obtained its first sample from inside “John Klein” on Sol 182 – the 182nd Martian day since Curiosity arrived in Gale Crater, which equates to the period of the 8th/9th February on Earth.
A series of three images from Curiosity’s forward Hazard Avoidance cameras (Hazcam), primarily used by the rover when manoeuvring / driving, put together to create a “video” showing the drill operation in progress
The drilling operation, which cut a hole some 6.4cm (2.5 in) deep into the rock, collected around a tablespoon’s worth of material. In order to help avoid the risk of material from the surface of the rock, which has been affected by the environmental conditions on the surface of Mars, from contaminating drill samples, the actual sample gathering with the drill doesn’t commence until the bit is some 2 centimetres inside the rock. So in the case of “John Klein” the collected material comes from a depth of between two and five centimetres inside the bedrock layer.
The sample was gathered as cuttings from the drill’s boring into the rock were forced up into the drill bit shroud and delivered to one of two holding chambers (Chamber A in the diagram below) located in the head of the drill bit mechanism.
How the drill works: On the left, a view of the drill mechanism mounted on the rover’s turret, with the drill bit centre bottom. On the right a cutaway showing the sample collection mechanism in the drill bit
Following collection, the sample was used to initiate “cleaning” operations designed to remove microscopic Earth- based contaminants left within the drill as a result of its construction to prevent them unduly affecting any later analysis of sample material by CheMin and (particularly, given its sensitivity) SAM.
The first part of this “cleaning” work actually occurred during the drilling operation itself, due to the vibrations caused by the drill’s percussive (hammer) action agitating the material in the collection chamber, causing it to scour the chamber walls. Once drilling had been completed, and the robot arm returned to its stowed configuration, cleaning resumed, this time using the mechanical vibration system which forms a part of CHIMRA – the Collection and Handling for In-Situ Martian Rock Analysis system. This vibrates the entire turret at high speed, causing the gathered deposits to “swish” around the drill’s sample chambers so that friction created between the cuttings and the chamber walls would help scour the latter clean.
Part of this work was delayed after two software bugs were reported by the rover. While these were subsequently shown to be of no significant concern, they did result in a pause in cleaning operations while the software was evaluated Earthside for potential impact on operations. However, with initial cleaning work deemed to have been completed on Sol 193 (February 20th), the sample was transferred directly to the rover’s sample gathering scoop so that it could be imaged using Curiosity’s Mastcam, and visually analysed as to its suitability for onward processing through CHIMRA.
Curiosity has completed its first sample-gathering drilling operation on Mars.
The news was confirmed in a NASA press release on February 9th (and in a Tweet “from” Curiosity itself!), with the actual sample gathering exercise taking place on Sol 182 of the mission ( February 8th/9th).
This marks the first time samples have been obtained from inside a Martian rock for analysis. Even so, it will be a while before any of the powdered material reaches the rover’s on-board science instruments.
The boring operation took place a few centimetres from the “mini drill test” performed earlier in the week and which I reported on here, with the drill cutting some 6.4cm (2.5 inches) into the bedrock dubbed “John Klein”. This was deep enough for powdered cuttings to be pushed up behind the drill head and into the sample collection mechanism within the drill.
“We commanded the first full-depth drilling, and we believe we have collected sufficient material from the rock to meet our objectives of hardware cleaning and sample drop-off,” said Avi Okon, drill cognizant engineer at NASA’s Jet Propulsion Laboratory, following the operation.
An image returned by the Mars Hand Lens Imager (MAHLI) showing the “mini drill test” hole bored into John Klein on Sol 180 (February 6th) to the right, and the deeper sample-gathering hole drilled into the rock on Sol 182 (February 8th/9th) on the left
Commenting on the achievement, NASA associate director for the agency’s Science Mission Directorate, and himself a former astronaut, John Grunsfeld said, “The most advanced planetary robot ever designed is now a fully operating analytical laboratory on Mars. This is the biggest milestone accomplishment for the Curiosity team since the sky-crane landing last August.”
Even so, it will be a while before any of the gathered sample will be transferred to Curiosity’s Chemical and Minerology (CheMin) and Sample Analysis at Mars (SAM) instruments. The sample is currently being held in a small sample collection chamber in the drill mechanism itself, which it reached after being “pushed” up flutes in the side of the drill bit. Some of the gathered material will now be used to scour traces of contaminants which may have been deposited onto the hardware while the rover was still on Earth, despite thorough cleaning before launch.
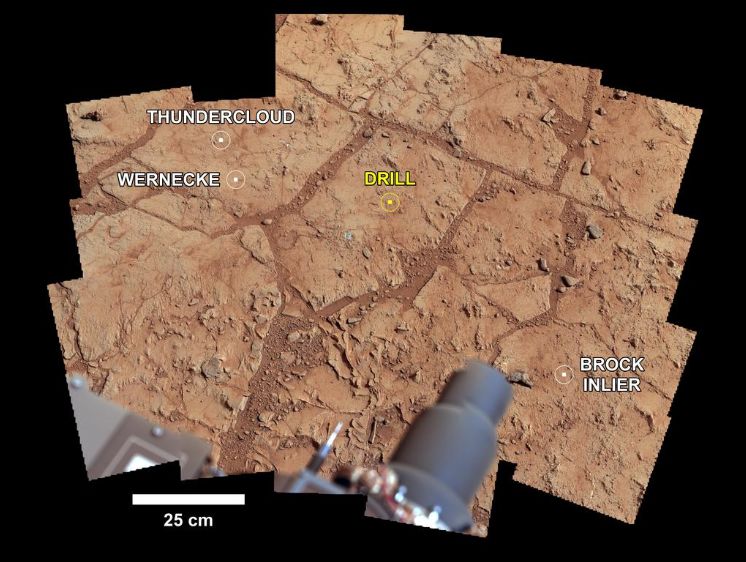
A mosaic of the “John Klein” drill site showing the areas identified for drilling relative to the actual drilling location. These images were capture by the rover’s Mastcam system, and the “shoulder” joint of the robot arm can be seen protruding into the picture from the bottom edge. This is a white-balanced image showing the rock surface as it would appear in normal Earth lighting conditions
Please use the page numbers below to continue reading this article
On Wednesday 6th February, Curiosity used its drill for the very first time to cut into a rock on Mars – the first time such an operation has ever been undertaken on the Red Planet.
The operation wasn’t a sample-gathering one, or even an attempt to obtain surface material for use in “cleaning” the internal sample collection feeds in the drill. It was what NASA referred to as a “mini drill test” designed to ensure the drill behaved as anticipated when combining both the drilling and hammer actions, and to generate cuttings which could be used to confirm the inside of the rock – dubbed “John Klein” in tribute to former Mars Science Laboratory deputy project manager John W. Klein, who died in 2011 – would provide material suitable for processing by the rover’s sample handling mechanisms.
The borehole resulting from the operation cut just 2 centimetres into the rock, but it provided enough material for initial visual analysis using the Mars Hand Lens Imager MAHLI), also mounted on the rover’s robot are along with the drilling mechanism.
A “blink” pair of images showing “John Klein” before and after the “mini drill test” : the bore hole (some 2cm deep and 1.6cm in diameter) and debris.
Two images taken by the telephoto lens of the rover’s Mastcam system were taken to present a before-and-after “blink” image of the drill site, with the first image capture on Sol 178 (February 4th), prior to drilling, and the second captured on Sol 180 (February 6th), immediately after drilling had been completed and the turret rotated out of the way. In the second image, the results of the drilling can clearly be seen – not just with the hole and surrounding cuttings, but in the way that vibrations from the drill’s cutting / hammering has shaken dust and debris from the surrounding veins in the rock, most notably those at the bottom of the image.
Once drilling had been completed, Curiosity manoeuvred MAHLI into position over the hole to capture a range of close-up images which would be used to visually analyse the cuttings and assess their suitably for sample processing. The first of these images returned to Earth revealed a near-perfect borehole, leading members of the mission team to dub it “sweet baby”.
“Sweet baby” up close: imaged by MALHI, the 2cm deep hole is revealed in detail, surrounded by cuttings, some of which are compacted as a result of the drill’s cutting / percussive actions.
Visual analysis of the images is liable to continue for the next few days, and will likely be coupled with use of the Chemical Camera (ChemCam) system with its powerful remote imager system, prior to a decision being made as to whether material yielded by the rock is suitable for further processing.
Providing engineers and scientists are satisfied, a further drilling operation will take place on the same rock, with the aim of cutting a borehole some 5cm deep. This will be deep enough for cut material to be pushed up behind the drill head and into the sample collection mechanism behind it. These cuttings will then be used to “clean” the internal elements of the drill’s sample-gathering system, prior to being passed to CHIMRA – the Collection and Handling for In-situ Martian Rock Analysis system, used to pre-process samples for delivery to Curiosity’s on-board science instruments – and dumped.
Once engineers are satisfied that the drill’s internals have been suitably cleaned of any remaining microscopic contaminants from Earth, material gathered by it will be delivered to CHIMRA for processing and delivery to the Chemical and Minerology (CheMin) and Sample Analysis at Mars (SAM) instruments on board the rover proper.
All of this operations are expected to commence this coming week, and will mark the opening of yet another new chapter in Curiosity’s history.
A Further Self-portrait
Prior to carrying out the final drill tests, a series of commands were uploaded to Curiosity, instructing it to gather several dozen exposures of itself as it sits on “John Klein”. The aim of the exercise was to gain further views of the rover’s general condition, combining both “wide-angle” and “close-up” shots of the rover and its components.
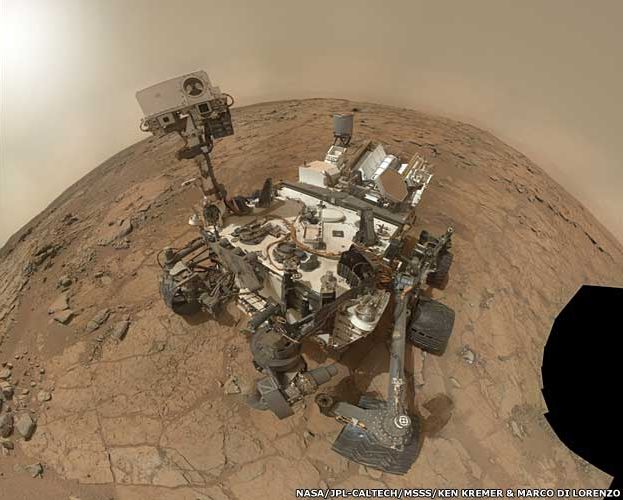
A further self-portrait. Some 66 images were put together to produce this mosaic of Curiosity parked on “John Klein”. Captured using MAHLI, mounted on the turret at the end of the rover’s robot arm
Some 66 of these images, gathered on Sol 177 (February 3rd), were combined into a mosaic showing the rover parked on “John Klein” to give a remarkable “in-situ” self-portrait, in which all of the major components of the rover can be seen, other than the robot arm itself (although the arm’s “shoulder” joint can be seen next to the rover’s wheel in the bottom right of the picture). At the back of the rover is the nuclear power unit, with the communications systems on either side of it (the “tin can” of the low-gain antenna to the left and the hexagonal high-gain antenna to the right). Front left of the picture is the mast system, with the ChemCam system with the Mastcam and NavCam cameras directly under it facing towards MAHLI, and the grey covers of the sample delivery systems for CheMin and SAM visible at the front of the rover, between the mast and MAHLI’s position.
It’s been a while since there have been any formal updates from the mission team responsible for NASA’s Mars Science Laboratory. With the focus on preparing for the first set of drilling operations, this is understandable – although this is far from the only activity the Curiosity has been engaged in. “Routine” monitoring of the environment in Gale Crater and particularly around the “Yellowknife Bay” region continues, and the rover has been carrying out a number of other activities as well, including giving itself a once-over with camera systems to give engineers insight into its general condition after five months operation on Mars.
Does it Glow in the Dark?
Not long after my last mission update, Curiosity achieved another first – imaging surface features on Mars at night under white light and ultraviolet conditions. The images were captured using the Mars Hand Lens Imager (MAHLI), mounted on the rover’s turret at the end of the robot arm.
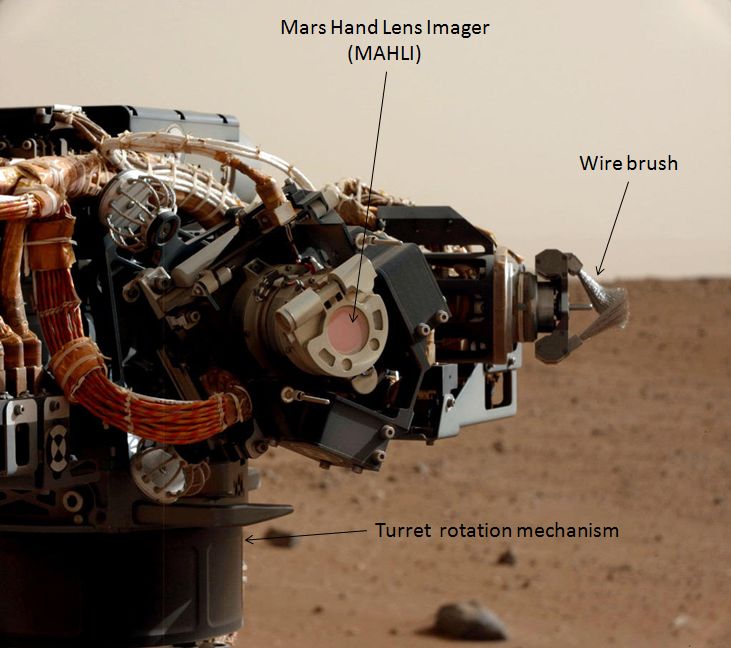
The MAHLI camera – the LEDs can be seen in the ring surrounding the circular lens, still protected in this image by its dust cover
MAHLI is equipped with a series of light-emitting diodes which enable it to undertake imaging in low-lighting conditions and, in the case of the ultraviolet LEDs, to see if fluorescent minerals are present in rocks, which would reveal more about their chemical composition.
The tests were carried out on Sol 165 (January 22nd), when Curiosity deployed MAHLI after the local sun set to examine a target rock dubbed “Sayunei”. Prior to the image capture option, Curiosity was had been commanded to drive onto the rock and then “scuff” it with a wheel to remove surface dust and debris and provide a suitable area for testing, rather than using the wire brush also mounted on the rover’s turret. MAHLI was then tested against an ultraviolet test target on the “Lincoln Penny” calibration test panel mounted on the rover’s body before being positioned for the image capture process, which saw the target rock imaged under both the white light and the ultra-violet LEDs.
“Sayunei” imaged by the Mars Hand Lens Imager (MAHLI) under ultraviolet light (365 nanometre wavelength) cast from LEDs surrounding the camera lens. The image represents an area some 34.cm by 2.5 cm (1.3 by 1 inch), and was captured with a 30-second exposure. The use of ultra-violet light allows scientists to locate any fluorescent minerals present in the rock. Analysis of the acquired image is still underway, and the bright areas should not be taken as a sign that fluorescent material had been found
While the images returned by MAHLI showed very bright areas in the rock when under the ultraviolet lighting, NASA personnel cautioned against this being indicative of any fluorescent material being present in the rock. Discussing the images, MAHLI Principal Investigator Ken Edgett of Malin Space Science Systems, San Diego, said, “The science team is still assessing the observations. If something looked green, yellow, orange or red under the ultraviolet illumination, that’d be a more clear-cut indicator of fluorescence.”
Pre-load Tests
Before drilling could commence, engineers on the mission team wanted to ensure the whether the amount of force applied to the hardware matches predictions for what would result from the commanded motions. This involved positioning the robot arm with the drill bit oriented as if for an actual drilling operation and bringing it into contact with a rock surface. One of four locations identified as the possible initial drilling point in the rock dubbed “John Klein” was used for the test on Sol 170 (January 27th).
Please use the page numbers below to continue reading this article
 On Wednesday February 27th, after some 200 days of near-flawless operations on Mars, Curiosity had its first major malfunction. Up until that point, the rover had been operating using one of its two on-board computers – the so-called “A-side”, to process all command instructions and manage its activities on Mars.
On Wednesday February 27th, after some 200 days of near-flawless operations on Mars, Curiosity had its first major malfunction. Up until that point, the rover had been operating using one of its two on-board computers – the so-called “A-side”, to process all command instructions and manage its activities on Mars.