Curiosity has completed its first sample-gathering drilling operation on Mars.
The news was confirmed in a NASA press release on February 9th (and in a Tweet “from” Curiosity itself!), with the actual sample gathering exercise taking place on Sol 182 of the mission ( February 8th/9th).
This marks the first time samples have been obtained from inside a Martian rock for analysis. Even so, it will be a while before any of the powdered material reaches the rover’s on-board science instruments.
The boring operation took place a few centimetres from the “mini drill test” performed earlier in the week and which I reported on here, with the drill cutting some 6.4cm (2.5 inches) into the bedrock dubbed “John Klein”. This was deep enough for powdered cuttings to be pushed up behind the drill head and into the sample collection mechanism within the drill.
“We commanded the first full-depth drilling, and we believe we have collected sufficient material from the rock to meet our objectives of hardware cleaning and sample drop-off,” said Avi Okon, drill cognizant engineer at NASA’s Jet Propulsion Laboratory, following the operation.
An image returned by the Mars Hand Lens Imager (MAHLI) showing the “mini drill test” hole bored into John Klein on Sol 180 (February 6th) to the right, and the deeper sample-gathering hole drilled into the rock on Sol 182 (February 8th/9th) on the left
Commenting on the achievement, NASA associate director for the agency’s Science Mission Directorate, and himself a former astronaut, John Grunsfeld said, “The most advanced planetary robot ever designed is now a fully operating analytical laboratory on Mars. This is the biggest milestone accomplishment for the Curiosity team since the sky-crane landing last August.”
Even so, it will be a while before any of the gathered sample will be transferred to Curiosity’s Chemical and Minerology (CheMin) and Sample Analysis at Mars (SAM) instruments. The sample is currently being held in a small sample collection chamber in the drill mechanism itself, which it reached after being “pushed” up flutes in the side of the drill bit. Some of the gathered material will now be used to scour traces of contaminants which may have been deposited onto the hardware while the rover was still on Earth, despite thorough cleaning before launch.
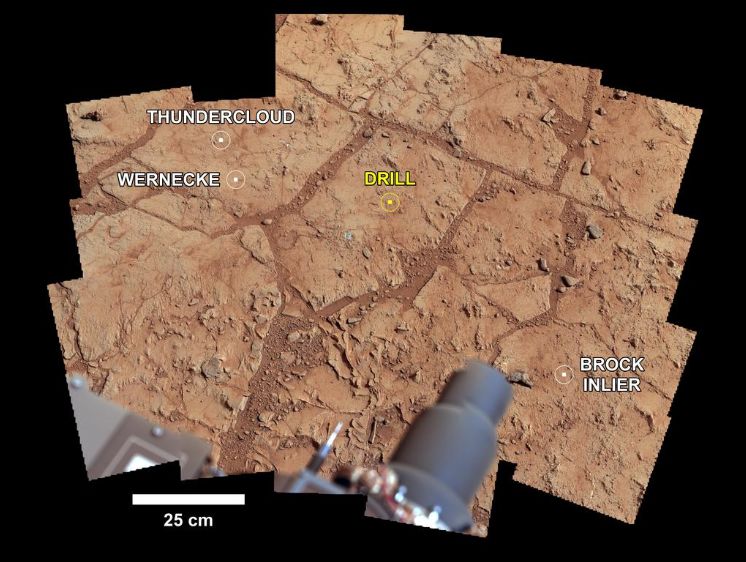
A mosaic of the “John Klein” drill site showing the areas identified for drilling relative to the actual drilling location. These images were capture by the rover’s Mastcam system, and the “shoulder” joint of the robot arm can be seen protruding into the picture from the bottom edge. This is a white-balanced image showing the rock surface as it would appear in normal Earth lighting conditions
Please use the page numbers below to continue reading this article
On Wednesday 6th February, Curiosity used its drill for the very first time to cut into a rock on Mars – the first time such an operation has ever been undertaken on the Red Planet.
The operation wasn’t a sample-gathering one, or even an attempt to obtain surface material for use in “cleaning” the internal sample collection feeds in the drill. It was what NASA referred to as a “mini drill test” designed to ensure the drill behaved as anticipated when combining both the drilling and hammer actions, and to generate cuttings which could be used to confirm the inside of the rock – dubbed “John Klein” in tribute to former Mars Science Laboratory deputy project manager John W. Klein, who died in 2011 – would provide material suitable for processing by the rover’s sample handling mechanisms.
The borehole resulting from the operation cut just 2 centimetres into the rock, but it provided enough material for initial visual analysis using the Mars Hand Lens Imager MAHLI), also mounted on the rover’s robot are along with the drilling mechanism.
A “blink” pair of images showing “John Klein” before and after the “mini drill test” : the bore hole (some 2cm deep and 1.6cm in diameter) and debris.
Two images taken by the telephoto lens of the rover’s Mastcam system were taken to present a before-and-after “blink” image of the drill site, with the first image capture on Sol 178 (February 4th), prior to drilling, and the second captured on Sol 180 (February 6th), immediately after drilling had been completed and the turret rotated out of the way. In the second image, the results of the drilling can clearly be seen – not just with the hole and surrounding cuttings, but in the way that vibrations from the drill’s cutting / hammering has shaken dust and debris from the surrounding veins in the rock, most notably those at the bottom of the image.
Once drilling had been completed, Curiosity manoeuvred MAHLI into position over the hole to capture a range of close-up images which would be used to visually analyse the cuttings and assess their suitably for sample processing. The first of these images returned to Earth revealed a near-perfect borehole, leading members of the mission team to dub it “sweet baby”.
“Sweet baby” up close: imaged by MALHI, the 2cm deep hole is revealed in detail, surrounded by cuttings, some of which are compacted as a result of the drill’s cutting / percussive actions.
Visual analysis of the images is liable to continue for the next few days, and will likely be coupled with use of the Chemical Camera (ChemCam) system with its powerful remote imager system, prior to a decision being made as to whether material yielded by the rock is suitable for further processing.
Providing engineers and scientists are satisfied, a further drilling operation will take place on the same rock, with the aim of cutting a borehole some 5cm deep. This will be deep enough for cut material to be pushed up behind the drill head and into the sample collection mechanism behind it. These cuttings will then be used to “clean” the internal elements of the drill’s sample-gathering system, prior to being passed to CHIMRA – the Collection and Handling for In-situ Martian Rock Analysis system, used to pre-process samples for delivery to Curiosity’s on-board science instruments – and dumped.
Once engineers are satisfied that the drill’s internals have been suitably cleaned of any remaining microscopic contaminants from Earth, material gathered by it will be delivered to CHIMRA for processing and delivery to the Chemical and Minerology (CheMin) and Sample Analysis at Mars (SAM) instruments on board the rover proper.
All of this operations are expected to commence this coming week, and will mark the opening of yet another new chapter in Curiosity’s history.
A Further Self-portrait
Prior to carrying out the final drill tests, a series of commands were uploaded to Curiosity, instructing it to gather several dozen exposures of itself as it sits on “John Klein”. The aim of the exercise was to gain further views of the rover’s general condition, combining both “wide-angle” and “close-up” shots of the rover and its components.
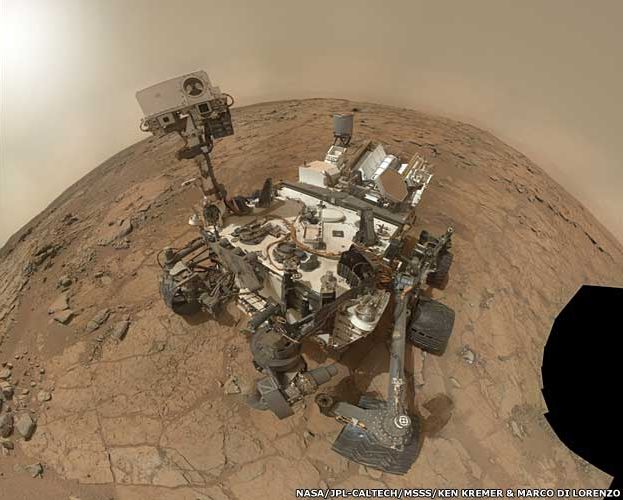
A further self-portrait. Some 66 images were put together to produce this mosaic of Curiosity parked on “John Klein”. Captured using MAHLI, mounted on the turret at the end of the rover’s robot arm
Some 66 of these images, gathered on Sol 177 (February 3rd), were combined into a mosaic showing the rover parked on “John Klein” to give a remarkable “in-situ” self-portrait, in which all of the major components of the rover can be seen, other than the robot arm itself (although the arm’s “shoulder” joint can be seen next to the rover’s wheel in the bottom right of the picture). At the back of the rover is the nuclear power unit, with the communications systems on either side of it (the “tin can” of the low-gain antenna to the left and the hexagonal high-gain antenna to the right). Front left of the picture is the mast system, with the ChemCam system with the Mastcam and NavCam cameras directly under it facing towards MAHLI, and the grey covers of the sample delivery systems for CheMin and SAM visible at the front of the rover, between the mast and MAHLI’s position.
It’s been a while since there have been any formal updates from the mission team responsible for NASA’s Mars Science Laboratory. With the focus on preparing for the first set of drilling operations, this is understandable – although this is far from the only activity the Curiosity has been engaged in. “Routine” monitoring of the environment in Gale Crater and particularly around the “Yellowknife Bay” region continues, and the rover has been carrying out a number of other activities as well, including giving itself a once-over with camera systems to give engineers insight into its general condition after five months operation on Mars.
Does it Glow in the Dark?
Not long after my last mission update, Curiosity achieved another first – imaging surface features on Mars at night under white light and ultraviolet conditions. The images were captured using the Mars Hand Lens Imager (MAHLI), mounted on the rover’s turret at the end of the robot arm.
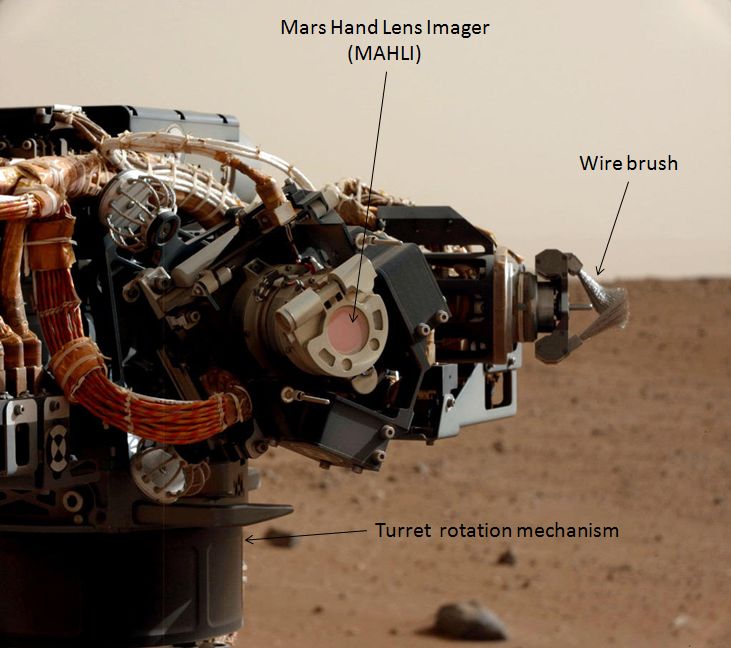
The MAHLI camera – the LEDs can be seen in the ring surrounding the circular lens, still protected in this image by its dust cover
MAHLI is equipped with a series of light-emitting diodes which enable it to undertake imaging in low-lighting conditions and, in the case of the ultraviolet LEDs, to see if fluorescent minerals are present in rocks, which would reveal more about their chemical composition.
The tests were carried out on Sol 165 (January 22nd), when Curiosity deployed MAHLI after the local sun set to examine a target rock dubbed “Sayunei”. Prior to the image capture option, Curiosity was had been commanded to drive onto the rock and then “scuff” it with a wheel to remove surface dust and debris and provide a suitable area for testing, rather than using the wire brush also mounted on the rover’s turret. MAHLI was then tested against an ultraviolet test target on the “Lincoln Penny” calibration test panel mounted on the rover’s body before being positioned for the image capture process, which saw the target rock imaged under both the white light and the ultra-violet LEDs.
“Sayunei” imaged by the Mars Hand Lens Imager (MAHLI) under ultraviolet light (365 nanometre wavelength) cast from LEDs surrounding the camera lens. The image represents an area some 34.cm by 2.5 cm (1.3 by 1 inch), and was captured with a 30-second exposure. The use of ultra-violet light allows scientists to locate any fluorescent minerals present in the rock. Analysis of the acquired image is still underway, and the bright areas should not be taken as a sign that fluorescent material had been found
While the images returned by MAHLI showed very bright areas in the rock when under the ultraviolet lighting, NASA personnel cautioned against this being indicative of any fluorescent material being present in the rock. Discussing the images, MAHLI Principal Investigator Ken Edgett of Malin Space Science Systems, San Diego, said, “The science team is still assessing the observations. If something looked green, yellow, orange or red under the ultraviolet illumination, that’d be a more clear-cut indicator of fluorescence.”
Pre-load Tests
Before drilling could commence, engineers on the mission team wanted to ensure the whether the amount of force applied to the hardware matches predictions for what would result from the commanded motions. This involved positioning the robot arm with the drill bit oriented as if for an actual drilling operation and bringing it into contact with a rock surface. One of four locations identified as the possible initial drilling point in the rock dubbed “John Klein” was used for the test on Sol 170 (January 27th).
Please use the page numbers below to continue reading this article
Tuesday January 15th 2012 marked Sol 158 on Mars for Curiosity, and the first NASA / JPL telecon for 2013. As per my last report, the Mars Science Laboratory rover remains in “Yellowknife Bay”, which has revealed itself as a geological treasure trove. The net result of this is that Curiosity will be remaining in the area for a while to come, and that the first drilling operation which had been anticipated for this week has now been pushed back for perhaps two weeks while scientists use the time to carry out more extensive observations and examination of the wide variety of rock types in the region.
Referring the region, mission Principal Investigator John Grotzinger describes it as a “jackpot environment” for scientific exploration. A depressional area, “Yellowknife Bay” had already been identified as a possible location where free-flowing water many have been present. However, examination over the course of the last couple of weeks reveals that the entire area has been subject to very heavy aqueous activity, including the formation of rich mineral deposits.
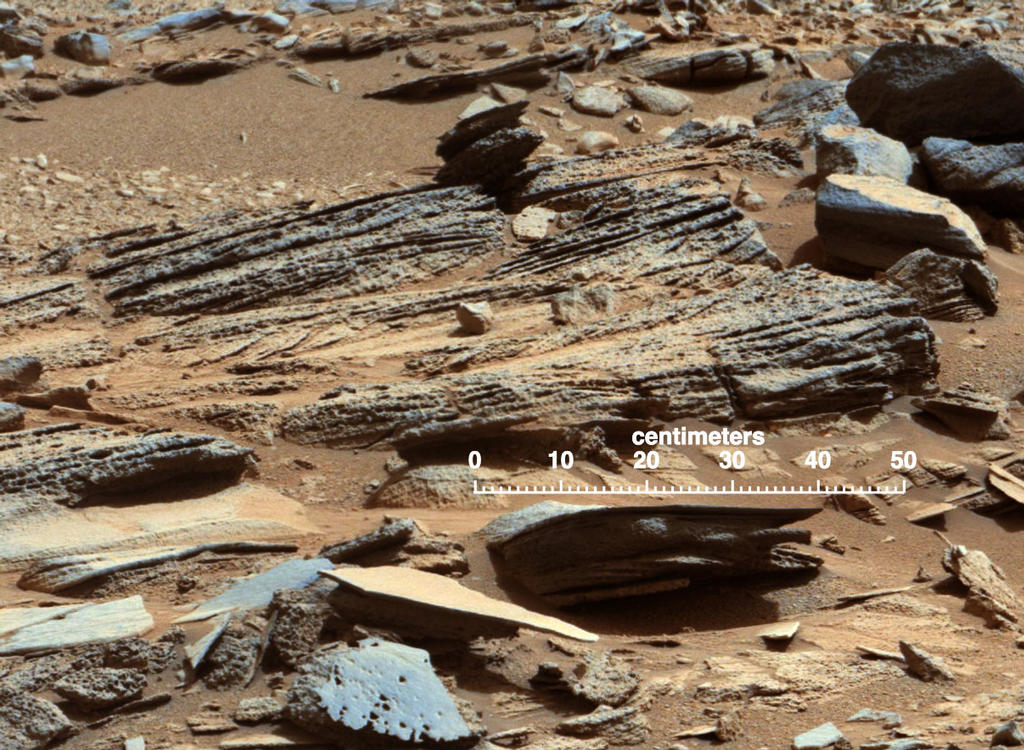
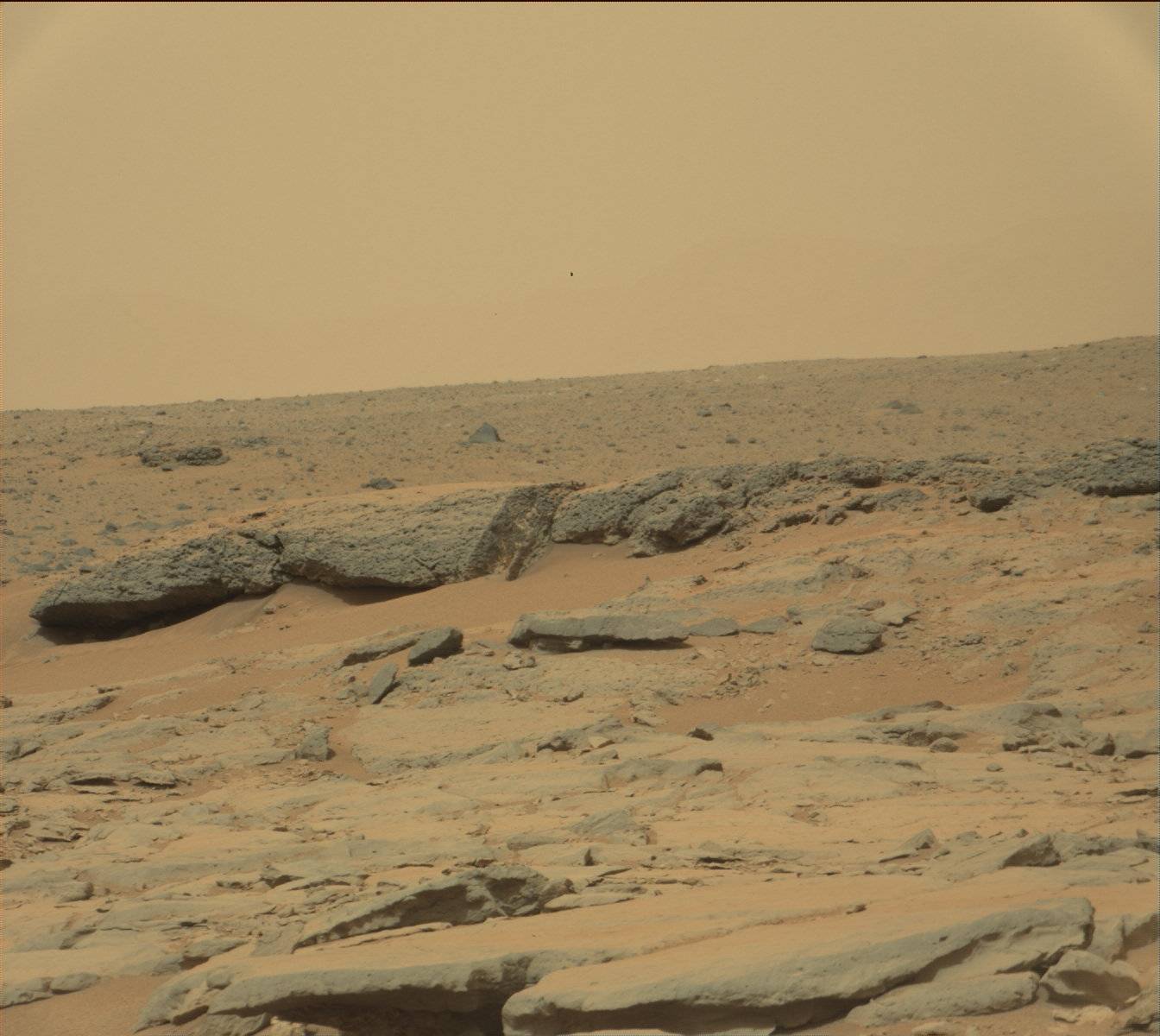
Evidence of water having flowed freely in “Yellowknife Bay”.An image from Curiosity’s Mastcam shows inclined layering known as cross-bedding in an outcrop dubbed “Shaler”. This cross-bedding is indicative of sediment transport in stream flows: currents mold the sediments into small underwater dunes that migrate downstream. When exposed in cross-section, evidence of this migration is preserved as strata that are steeply inclined relative to the horizontal — thus the term “cross-bedding.” The grain sizes here are coarse enough to exclude wind transport (click to enlarge)
While orbital surveys ahead of the mission showed the area to be a likely location for finding evidence of water action – it is very much an alluvial plain, after all – the MSL team have nevertheless been surprised at the diversity of rock formations found, and the very strong evidence of what is called “mineral precipitation” – a process whereby minerals which formed elsewhere being carried to the region by strong water currents (estimated to be perhaps as high as a metre per second), before the current slows to a point where the minerals can no longer be held in suspension and so “precipitate out” as deposits on and in the rocks.
The ChemCam laser has been employed in the study of some of the mineral deposits within the rocks, revealing they contain Hydrated Calcium Sulfates. On Earth, calcium sulfates like gypsum form frequently in veins when relatively dilute fluid circulates at low to moderate temperatures – in other words, water must have once been circulating through the veins in the rocks in order for these minerals, thought to be gypsum or bassanite, to form.
Please use the page numbers below to continue reading this article
Curiosity spent the Christmas and New Year period parked in at “Grandma’s House”, a point of geological interest within the “Yellowknife Bay” area of Gale Crater. With most of the mission team on Earth taking a break over the holiday period, the rover was left largely to its own devices for an 11-day period. This was not only to accommodate the holidays – which saw some NASA / JPL personnel available to step-in should problems be reported – but also to test the rover’s capabilities for upcoming times when it will be completely out-of-communication with Earth.
The times occur during what is known as periods of solar conjunction, which place Earth and Mars on opposite sides of the Sun. During these periods, which can last some two weeks, communications between Earth and vehicles operating on and around Mars are severely disrupted / curtailed due to interference from the Sun.
Solar conjunction: when Earth (r) is on the opposite side of the Sun or another solar system body – in this case, Mars (l)
As a result, vehicles like Curiosity need to have sufficient instructions stored onboard so that they can continue to operate when it is impossible to upload commands on a daily basis, and to ensure their safety systems / processes are properly primed should anything untoward happen and the vehicle is forced to “safe” itself. The Christmas / New Year break was an ideal time for NASA / JPL to test Curiosity’s ability to operate in an effectively autonomous mode in preparation for the first such conjunction, which will occur in April 2013.
In all, two days were spent uploading 11 days’ worth of instructions and mission activities to the rover. These included instructions for Curiosity to record panoramic images of its surroundings and also images of potential targets of interest for the next phase of the mission. With “full” mission operations resuming on the 3rd January, 2013, mission project manager Richard Cook of JPL said of Curiosity’s first extended period of autonomous operation, “We had no surprises over the holidays,” before turning attention to the next immediate step in the mission: to commission the rover’s onboard drill.
A raw image captured by Curiosity’s Mastcam on Sol 136 (December 23rd, 2012) looking out over “Yellowknife Bay”. The image has not been white balanced and thus shows the scene as it would ben seen by the human eye in local lighting / conditions (click to enlarge)
It has continued to be a little quiet, news-wise where the Mars Science Laboratory (MSL) mission is concerned. As mentioned last time, this is hardly surprising, given the way the news cycle works.
Since my last report, Curiosity has started exploring the depression slight to east of Glenelg which has been given the name “Yellowknife Bay”. This is an area of one of three terrain types which come together within Glenelg itself (one of the other two being the terrain the rover has been traversing since its arrival on Mars at the start of August). It is very different in nature to the terrain found around the landing site at Bradbury Landing, and an initial approach to the area was halted on December 10th (Sol 123) when sensors on the rover reported conflicting angles of tilt to the main computer. While Curiosity was in no danger of toppling over, an on-board safety protocol was initiated which halted the rover’s planned drive while it ‘phoned home for advice.
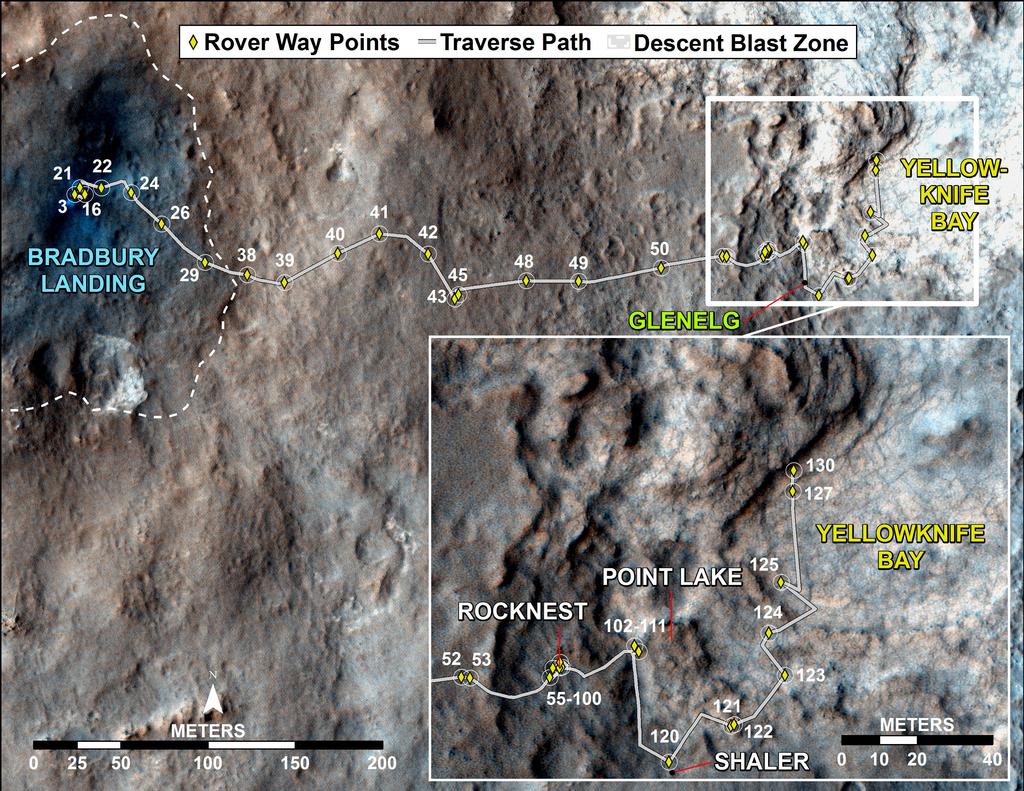
Curiosity’s progress (click to enlarge)
Confident the rover was in no danger, mission managers instructed Curiosity to resume its drive on Sol 124, which saw it complete the planned traverse from the 10th December and pass over a 1/2-metre lip into the depression proper. On Sol 125 (December 12th) Curiosity covered a further 26.1 metres (86 ft), moving well into the depression, surveying a number of rocks along the way with both the Mastcam system and ChemCam in a series of remote sensing exercises.
A prime mission goal for Curiosity’s explorations of Yellowknife Bay is the identification of a suitable candidate for the first use of the percussive drill – the last major item of equipment on the rover’s robot arm turret to be commissioned. As such, the rock surveys were part of this work.
Close-up of Curiosity’s drill in action (simulation) – the drill should be deployed for the first time early in the New Year, 2013
The drill will be used to collect samples from inside Martian rocks, something never before attempted on Mars. The powdered sample, once obtained, will be passed through the CHIMRA system which is also used to sieve and sort samples obtained by the soil scoop, before being passed to CheMin and SAM aboard the rover for detailed analysis.
On December 14th, Curiosity completed a drive of 32.8 metres (108 ft) to reach two “targets of interest” which mission planners dubbed “Costello” and “Flaherty”. Each of these rocks was subjected to study using the Alpha Particle X-Ray Spectrometer (APXS) and MAHLI, the Mars Hand Lens Imager, both mounted on the rover’s robot arm turret. These studies lasted a couple of days, during which Curiosity carried out various REMS monitoring activities as well; then on Sol 130 a further drive of just 5.6 metres (18 ft).
 Curiosity has completed its first sample-gathering drilling operation on Mars.
Curiosity has completed its first sample-gathering drilling operation on Mars.