No, this isn’t a return to coverage of Wars of the Worlds in SL. November marks the start of the next round of missions to Mars, with two new orbiters about to depart Earth as a part of our efforts to better understand the Red Planet and its atmosphere. Meanwhile, and despite a lack of headline news, NASA’s Mars Science Laboratory (MSL) continues its own explorations of the Red Planet, as does its little cousin Opportunity, half a world away.
No, this isn’t a return to coverage of Wars of the Worlds in SL. November marks the start of the next round of missions to Mars, with two new orbiters about to depart Earth as a part of our efforts to better understand the Red Planet and its atmosphere. Meanwhile, and despite a lack of headline news, NASA’s Mars Science Laboratory (MSL) continues its own explorations of the Red Planet, as does its little cousin Opportunity, half a world away.
Driving Forward
During the last week of October, the MSL rover Curiosity chalked up another achievement making its first pair of back-to-back autonomous drives using its on-board capabilities rather than relying on assistance from Earth.
I’ve covered the benefits of Curiosity’s ability to “self navigate” and how it works in previous MSL reports. However, up until now the system has only been used after the rover has initially traversed a course carefully plotted by the drive team on Earth using images taken by the rover and from overhead passes of the Mars Reconnaissance Orbiter (MRO).
This was the case with the rover’s drive on Sunday 27th October, when it completed an autonomous drive after a plotted drive. However, on Monday 28th October Curiosity immediately resumed its autonomous drive without any input from Earth, heading for the next waypoint along the route which will eventually bring it into the lower slopes of “Mount Sharp”.
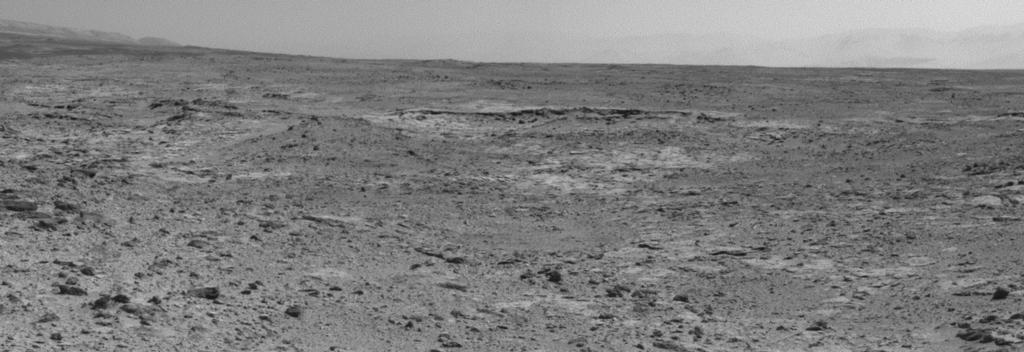
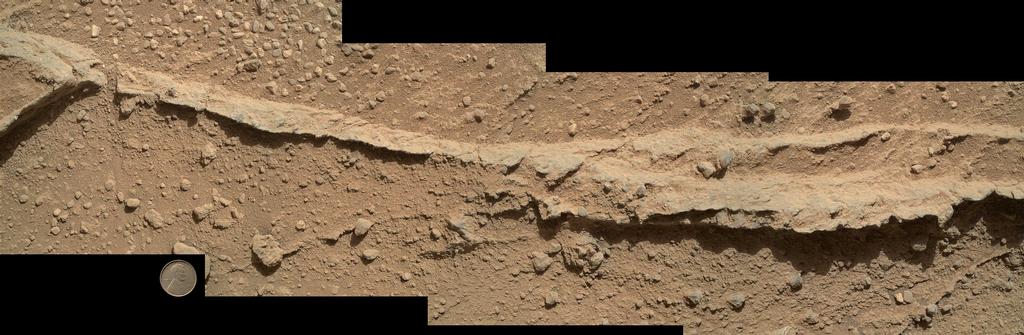
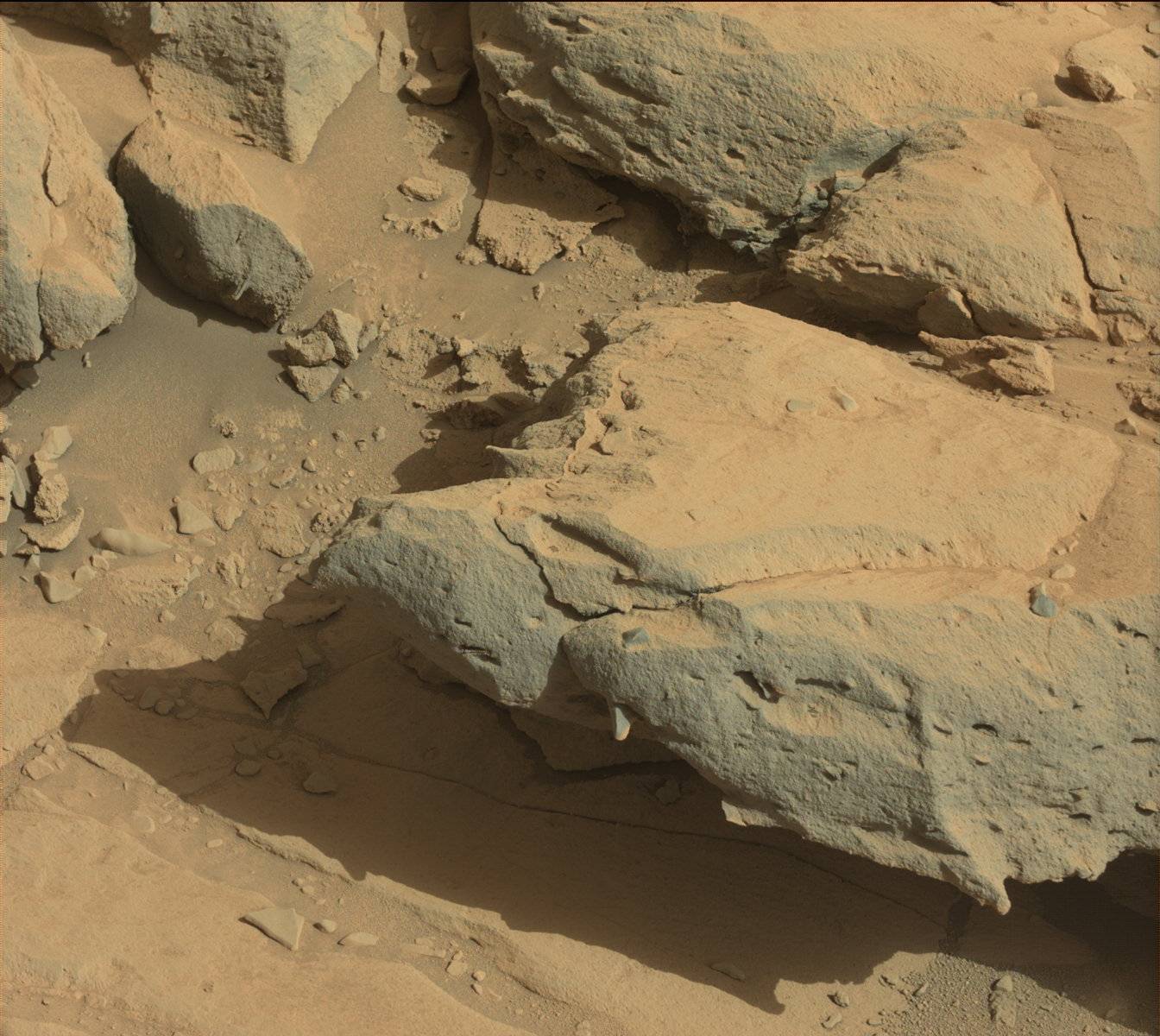
This waypoint, dubbed “Cooperstown”, is a rocky outcrop which had been identified as a candidate for examination by the rover in MRO images of the route to “Mount Sharp”. It is anticipated that Curiosity will spend no more than a day examining the outcrop, which is liable to be done predominantly using the instruments mounted on the turret at the end of the rover’s robot arm.
“What interests us about this site is an intriguing outcrop of layered material visible in the orbital images,” said Kevin Lewis of Princeton University and a participating scientist for the mission responsible for planning the “Cooperstown” activities. “We want to see how the local layered outcrop at ‘Cooperstown’ may help us relate the geology of ‘Yellowknife Bay’ to the geology of ‘Mount Sharp’.”
“Yellowknife Bay” is an area of Gale Crater which, alongside that of “Glenelg”, the rover spent some 6-months examining various rock formations and gathering samples for analysis.
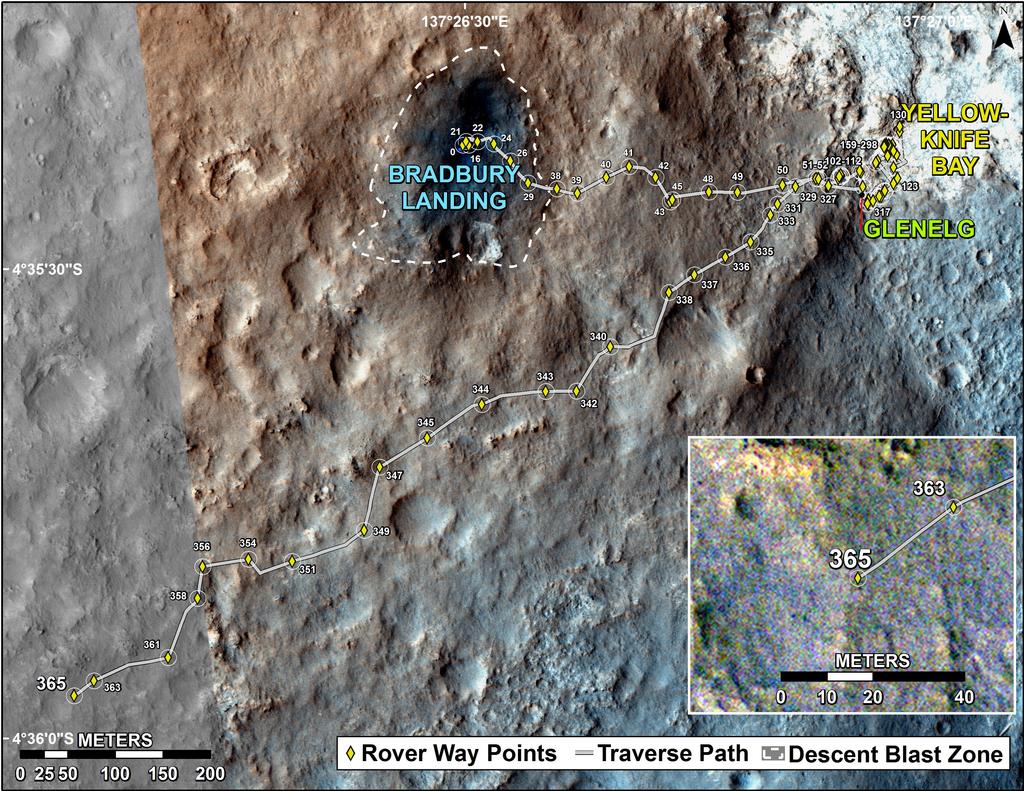
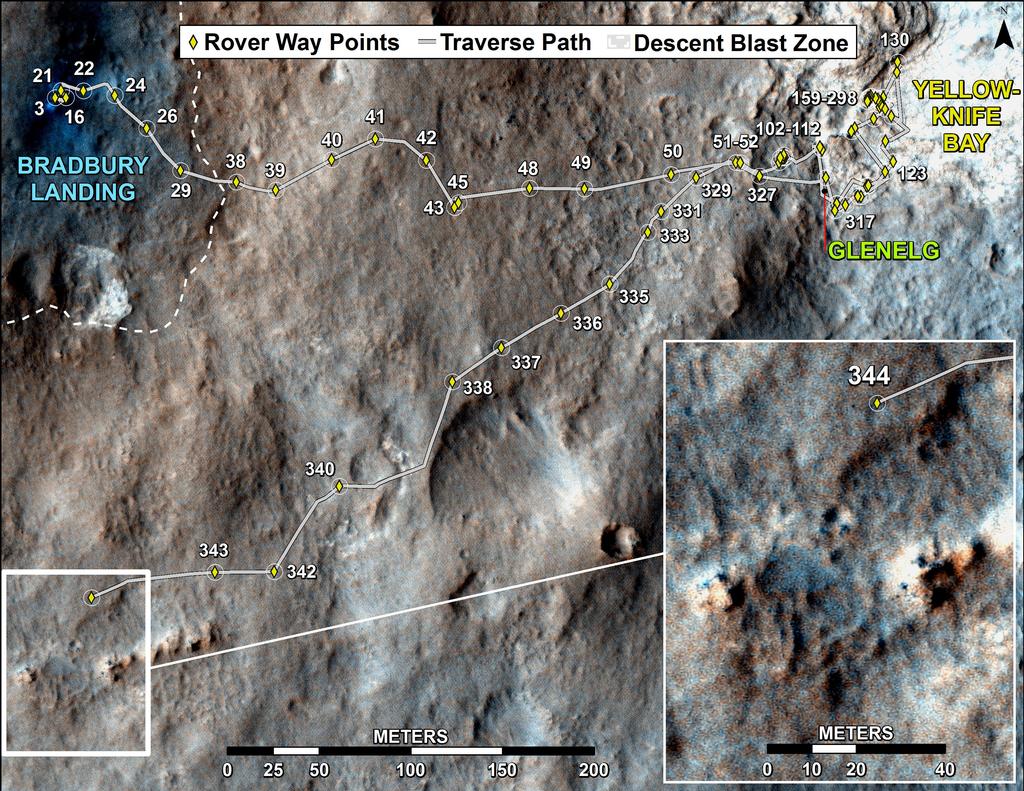
The planned duration of the “Cooperstown” stop is in marked contrast to the rover’s last waypoint stop, and coupled with the testing of back-to-back autonomous drives, is aimed at accelerating Curiosity’s progress towards the desired destination of “Mount Sharp”. So far, the rover has traversed around one-third of the 8.6 kilometres (5.3 miles) separating the “Yellowknife Bay” area, which it left in July 2013, from the entry point to the lower slopes of “Mount Sharp”.
The ability for the rover to safely store data necessary for it to resume self-navigation in its onboard memory is also vital for future planning for Curiosity’s progress over the upcoming holidays, when it is hoped that multi-day operations for the rover can be planned and uploaded, allowing the rover to continue in a range of activities, including driving, rather than necessarily spending the entire holiday periods parked-up and performing static science.
The next key activity for the rover is the uploading of the third new version of the on-board software. Such uploads are periodically needed in order to both prepare the rover for upcoming aspects of the mission and to improve its capabilities. This next update will see improvements in the information the rover is able to store overnight for the purposes of autonomous driving, updates to the software controlling the robot arm which should further increase the ability to use the arm when the rover is parked on a slope – something which is likely to be needed once Curiosity starts exploring “Mount Sharp”.