NASA’s Project Artemis, which plans to return humans to the Moon, is being increasingly strained under the weight of multiple opinions and as a result of on-going delays.
In December, NASA confirmed it is pushing back the next mission in the programme, Artemis 2 – intended to fly a crew of 4 around the Moon and back to Earth – back to April 2026, with the first lunar landing now not occurring until at least mid-2027 (see: Space Sunday: of Artemis and Administrators). More recently, the agency has attempted to walk back on the Artemis 2 mission date by saying April 2026 is the “at the latest” target, but efforts are focused on trying to offer a “work to” date which could be somewhat sooner.
In the interim, here have been calls from several different points on the compass calling for the abandonment of the current technology route for Artemis – the Space Launch System and Orion – and replace them with “something better”. Others are calling for “alternatives” to be used in place of the Space Launch System, which is regarded as the most crippling element of the Artemis programme on the basis of costs – critics citing its US $4 billion per launch cost and thus pointing to “cheaper” alternatives.
For example, claims have been made that Artemis 2 could still go ahead “simply” by substituting Blue Origin’s New Glenn as the Orion launch vehicle, and having Orion rendezvous and mate with a ULA Centaur upper stage placed in orbit by that company’s Vulcan launch vehicle (Centaur being the Vulcan upper stage), and using the Centaur to boost Orion on its way to the Moon. However, such a claim simply does not stand up to any reasonable examination due to the number and extend of changes that would be required, including:
- Significant alterations to New Glenn’s upper stage to handle Orion’s larger diameter, including an entirely new vehicle mount and new fairings to enclose Orion’s European Service Module (ESM).
- Alterations to the vehicles aerodynamics as a result of the above modifications in order to maintain stability during launch and ascent.
- A complete re-working of the Orion launch abort system (LAS), which has been designed specifically to work with SLS.
- Significant upgrades and alterations to the New Glenn launch facilities at Space Launch Complex 36, Canaveral Space Force Station, in order to support Orion and its systems while on the pad.
- As New Glenn is designed to have its payload integrated horizontally, and Orion is designed to be integrated into SLS vertically, it is likely significant changes would have to be made to either Blue Origin’s payload integration workflow / systems and / or Orion to accommodate mating both on a horizontal basis.

None of these issues are insurmountable, but the idea that they could be implemented in a manner that would allow Artemis 2 to go ahead in anything like the current time scales NASA is looking at, or without delaying Artemis as a whole, is frankly ludicrous. Nor do the problems end there.
With a combined mass of 26.5 tonnes, Orion and its ESM are too heavy for New Glenn to boost directly to the Moon – hence the suggested use of the Vulcan Centaur upper stage. However, this would require on-orbit rendezvous and docking between Orion and Centaur, something for which neither is designed – so the idea simply added another level of complexity to missions, which in turn will require even more expenditure (with NASA undoubtedly footing the bill) and additional delays while the vehicles are modified and tested.
Finally, and in the case of Artemis 2, the fact remains that the delay to that mission doesn’t lie with SLS – it is because of concerns over Orion’s heat shield, with NASA wanting to delay the mission so that additional studies can be carried out around optimising the capsule’s re-entry profile to minimise the kind of excessive ablation (aka “char loss”) seen in the initial SLS / Orion flight.
As to “replacing” the entire hardware roster – something the SpaceX CEO has called for – the answer has to be – with what? People will point to that company’s Starship / Super Heavy, but the fact is, that system has yet to achieve a single orbit of Earth – and is a very long way for being certified for (or capable of) carrying humans. A more viable solution might be to utilise Dragon XL and Falcon Heavy; NASA already see this combination as viable for resupply missions to the proposed Lunar Gateway station. But Dragon XL isn’t designed to carry humans and Falcon Heavy isn’t certified for crewed launches; so again, a switch could lead to protracted delays to Artemis and even more expenditure – which might well benefit SpaceX financially, but on its own will do little to move Artemis forward.

Hence why the Companies involved in the current Artemis lunar exploration campaign are urging the new administration and their prospective new NASA Administrator not to rock the boat, arguing the current architecture still offers the fastest way of getting humans back to the Moon from the United States. The simple fact is, that while there is nothing wrong with developing alternatives to SLS / Orion for future use; if NASA (and more importantly, the US government) want to reach the Moon without becoming serious stalled for years beyond the current delays, SLS / Orion remains, at this point in time, the most practical path to doing so.
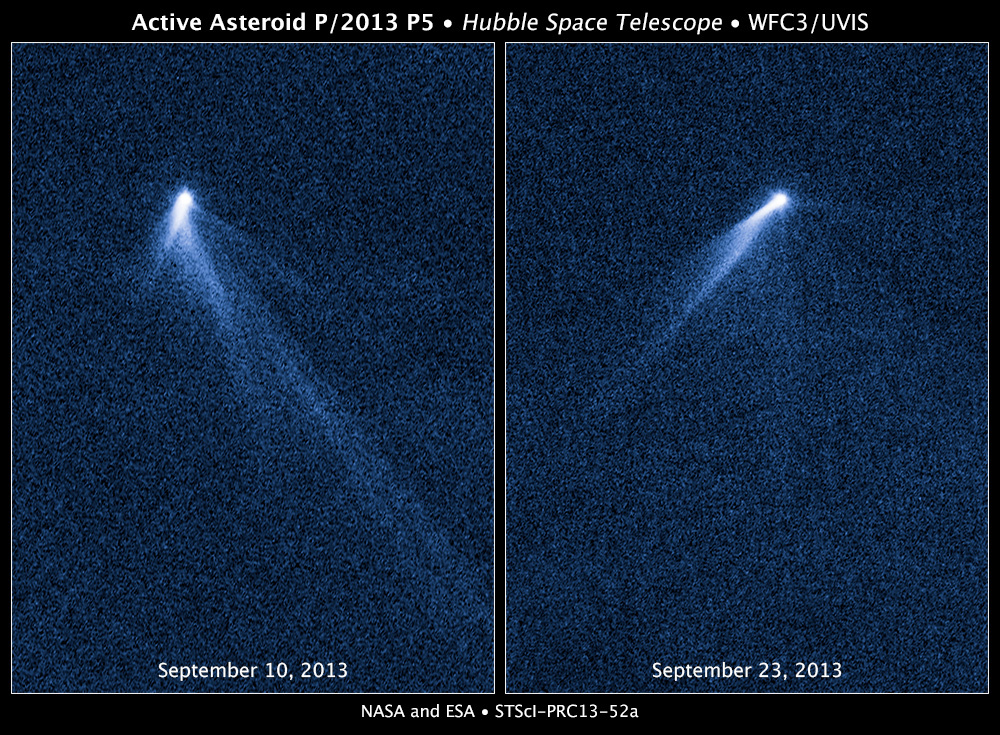
2024 YR4Sparks Planetary Defence Response – But There’s No Need to Panic
Estimated to be somewhere in the region of 50-60 metres across, 2024 YR4 is an Earth-crossing Apollo-type asteroid discovered on December 27th, 2024 and which – as of February 2nd, 2025 has a 1 in 71 (1.4%) chance of entering Earth’ atmosphere in December 2032.
A stony S-type or L-type asteroid was spotted just two days after it has passed just 828,000 km from Earth. It is now moving away from Earth and will make its next close approach in June 2028. The overall threat of the asteroid striking Earth is subject to further refinement. However, on January 29th, 2025, the International Asteroid Warning Network (IAWN) issued a warning that if the asteroid does impact Earth, possible impact sites include over the eastern Pacific Ocean, northern South America, the Atlantic Ocean, Africa, the Arabian Sea, and South Asia.

However, it is highly likely that as more observations are made utilising both ground- and space-based observatories and capabilities, the risk of impact will decline, not increase: hence the IAWN issuing a “first step” planetary defence response; they want as many eyes on the asteroid as it retreats from Earth so that the asteroid’s orbit around the Sun and how it might be influenced over time can be more precisely calculated. In this it is also estimated that rather than impacting in 2032, the asteroid will come to within approx. 277,000 km of Earth – which is still closer than the orbit of the Moon.
Were the asteroid to impact, it would do so at a 17.32 kilometres per second. Given its size and composition (both similar to the asteroid which likely caused the Tunguska event of 1908), any such impact would most likely result in an air burst of between 7 and 8 megatons rather than the asteroid actually striking the surface of the planet, likely resulting in a radius of destruction of some 50 km.

With the asteroid retreating from Earth, opportunities for gathering detailed data are limited, but will improve once more during the 2028 close approach, when the risk of impact in 2032 can be more accurately refined. Should the risk of impact then or in a further close approach remain, then a DART-style mission could be sent to prevent the impact.
“Life Here Began Out There”
Battlestar Galactica fans may well recognise the above quote, but the question as to whether life on Earth may have had a kick-start from beyond the planet has long been a tantalising one. In 2016, NASA launched OSIRIS-REx, a mission to recover samples from the asteroid 101955 Bennu. As I’ve previously covered, those samples were returned to Earth in September 2023 and have been undergoing study.
Two teams studying the samples have found that not only do the pristine building blocks for life, they also contain the salty remains of an ancient water world. In particular the sodium-rich minerals contain amino acids, nitrogen in the form of ammonia and even parts of the genetic code. Meanwhile, the salts found within the examined samples are very similar to those found within the ancient lakebeds of the Mojave and Sahara deserts.

Combining the ingredients of life – the minerals with their amino acids, etc., – with and environment of sodium-rich water, as suggested by the salty deposits in the sample, is regarded as “the pathway to life”, and the organic materials also found within the sample appear to support this. They further lend credence to the idea that Bennu was once a part of a much larger body which contained liquid water within it, but which was shattered through impacts, evaporating the liquids and leaving remnants like Bennu containing evidence of the basic building blocks of life. If this happened with Bennu’s parent object, it potentially happened with other bodies in the early solar system, and it is possible that fragments from those incidents found their way to Earth to help kick-start life.
Most of the Bennu sample is being preserved for comparison with samples with future missions, but the published result from these studies have led to a renewal of calls for a mission to collect samples from the icy dwarf planet of Ceres, visited by NASA’s Dawn mission, entering orbit there in March 2015, and where it remains, inoperative, to this day. During its study of Ceres, the mission’s spacecraft revealed the dwarf has a surface of hydrated minerals on its surface and likely has channels of brine flowing through its mantle which could hold further clues on the origins of life.
Starliner Update
NASA’s Aerospace Safety Advisory Panel (ASAP) provided something of an update on the status of investigations into the reported issues affecting Boeing’s CST-100 Starliner vehicle, following the problems experience with the propulsion units on the vehicle’s service module during the Crew Flight Test in mid-2024.
Although largely successful, the latter left significant question marks over the reliability of the vehicle’s thruster systems, and saw NASA exercise significant caution in not allowing the test crew of Barry Wilmore and Sunita Williams to return to Earth aboard the vehicle, although the Calypso capsule did ultimately return to Earth safely in September 2024.

Most notably, the ASAP update indicated that the capsule has been cleared, and a number of issues reports relating to the service module have now been closed. However, it also indicated the issues related to the service module’s thrusters – the primary cause of problems during the crew test flight – remain open and subject to both further testing campaigns. In this, the update was frustrating, in that beyond general statements of progress, specifics were not provided, and both NASA and Boeing have remained tight-lipped on the subject of the propulsion system since the Crew Flight Test.
As a result – whilst positive for the Starliner capsule units, the update does little to update on how or when the system will next fly; in October 2024, NASA indicated it was keeping the door open to a possible Starliner launch in 2025 – although whether or not this will be another test flight (either crewed or uncrewed) or an all-up 6-month crew rotation flight has yet to be finalised, and following the ASAP update, NASA indicated a possible flight was still on the cards, although it is not clear how any such flight would slot into the current ISS launch manifest.