
SpaceX President and COO Gwynne Shotwell has shed a little more light on the company’s plans for this Starship space vehicle.
Two prototypes of the vehicle are currently being developed for test flights at the company’s facilities in Boca Chica, Texas and in Florida, with the company hoping to fly one of them – most likely Starship Mk 1, being readied at Boca Chica – to an altitude of 20 km before the end of the year.
Beyond this, Starship is designed to be lifted to orbit atop the company’s new Super Heavy reusable booster and undertake missions to the surface of the Moon and then to Mars – and possibly beyond. Speaking at the 2019 International Astronautical Congress, Shotwell specifically addressed the company’s nearer-term aspirations, marking 2022 as the year they’d like to put Starship on the Moon for the first time:
We want to get Starship to orbit within a year. We definitely want to land it on the Moon before 2022. We want to […] stage cargo there to make sure that there are resources for the folks that ultimately land on the Moon by 2024, if things go well, so that’s the aspirational time frame.
Such a flight to the Moon won’t be made by either Starship Mk 1 or Mk 2 – these are intended purely for atmospheric flight tests – descent handling, landing capabilities, etc., and to define any changes that need to be made prior to the company committing to building at least two orbital test vehicles – Starships Mk 3 and Mk 4, before they progress to trying for the Moon.
This makes the time frame for the lunar missions as given by Shotwell very aggressive. They are dependent on the company quickly completing atmospheric tests of the vehicle, then moving to being able to undertake orbital missions and integrated with the Super Heavy in order to undertake the lunar flights – particularly the cargo delivery missions -, hence why Shotwell emphasised the “aspirational” nature of the time frame.

While the time frame is in keeping with Elon Musk’s own aggressive approach to such matters (and he would appear to love the sound of them whistling past, as next to none of his stated target dates for SpaceX, Tesla or any of his other ventures have ever been met), it is next to impossible to see how a 2022 goal can ever be met; there is simply too much to be achieved between now and then – such as actually flying a starship vehicle for the first time, or getting it and the Super Heavy booster to a point where they can be tested together, leave alone making any attempt to land a 50-odd metres tall cylinder on the rough and uneven surface of the Moon without it either breaking itsself on landing – or just toppling over.
Beyond the 2024 target for cargo missions, Musk has also stated that he’d like to have a lunar base established by 2028 – although Shotwell didn’t directly reference this, probably quite wisely.
In the meantime, and aside from these goals, SpaceX has already been contracted by Intuitive Machines and ispace. Both companies working with NASA to deliver payloads to the Moon ahead of the agency’s 2024 Artemis programme human Moon landing. However, this contractor are for the use of the company’s proven Falcon launch system, not the behemoth.
NASA Developing Lunar Rover
In preparing for, and as a part of, humans returning to the Moon, there will be a range of automated landing and rover missions. I recently wrote about one of these missions, intended to deliver a series of payloads to the lunar surface, including innovative mini-rovers from the UK and Japan (see Moles, rovers, and spacewalks). Now NASA has confirmed it is developing an automated rover of its own.
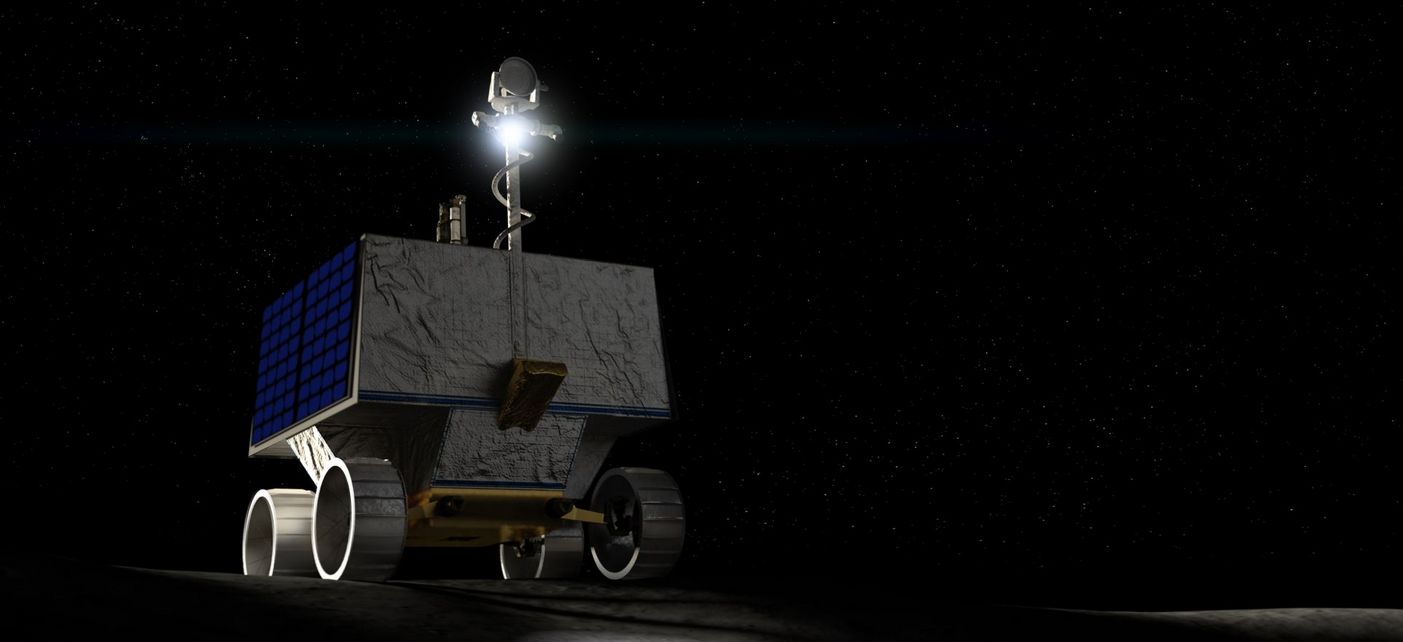
The rover, called VIPER (Volatiles Investigating Polar Exploration Rover), is due for delivery to the lunar surface in December 2022. Its mission is to gather data that will help inform future missions about the South Pole-Aitken Basin and the eventual construction of a base there. One of its specific goals is to locate water ice, characterise it as it lies under the lunar regolith and then drill down to the ice to determine how it sits within with regolith and then analyse the samples.
There is strong evidence for extensive sub-surface water ice within the Moon’s South Polar region, including in the bottoms of craters that never see sunlight, and characterising / accessing this water ice is seen as critical to NASA’s lunar ambitions, as it could be utilised in a number of ways, including providing oxygen for breathing or as propellant.
Roughly the size of a golf buggy (around 1.4 m × 1.4 m × 2 m), VIPER is being designed to travel multiple kilometres over a primary mission period of 100 days, carrying a suite of instruments comprising:
- The Neutron Spectrometer System – designed to detect sub-surface hydrogen (potentially water) from a distance, suggesting prime sites for drilling. It measures the energy released by hydrogen atoms when struck by neutrons.
- The Near InfraRed Volatiles Spectrometer System – designed to analyse mineral and volatile composition; determine if the hydrogen it encounters belong to water molecules (H2O) or to hydroxyl (OH–).
- The Mass Spectrometer Observing Lunar Operations – designed to analyse mineral and volatile composition by measuring the mass-to-charge ratio of ions to elucidate the chemical elements contained in the sample.
- The Regolith and Ice Drill for Exploring New Terrain – capable of drilling up to 1 m (3 ft) into the lunar regolith to gather ice samples.

As well as gathering and quantifying ice and water samples, the hope is that VIPER will gather data that can be used to create the first detailed water resource maps of the Moon that will be used to further inform decisions regarding human mission to the lunar surface.
The key to living on the Moon is water – the same as here on Earth. Since the confirmation of lunar water-ice ten years ago, the question now is if the Moon could really contain the amount of resources we need to live off-world. This rover will help us answer the many questions we have about where the water is, and how much there is for us to use.
– Daniel Andrews, VIPER mission project manager
No landing site has been determined for the rover at present, but it will be delivered to the Moon under NASA’s Commercial Lunar Payload Services (CLPS) programme, using a lander vehicle developed by Astrobotic and launched via a United Launch Alliance booster. VIPER itself is being developed by NASA’s Johnson Space Centre, Texas, with the science package provided by Kennedy Space Centre, NASA Ames Research Centre and Honeybee Robotics, with the entire programme being managed by NASA Ames.
It’s incredibly exciting to have a rover going to the new and unique environment of the South Pole to discover where exactly we can harvest that water. VIPER will tell us which locations have the highest concentrations and how deep below the surface to go to get access to water.
– Anthony Colaprete, VIPER project scientist
China’s Chang’e 5 Sample Return Mission Set for Late 2020 Launch
China’s planned Chang’e-5 lunar sample return mission is now targeted for a late 2020 launch as a result of launch vehicle delays.
The ambitious mission is designed to return samples gathered on the Moon for study here on Earth, however, such is its complexity that it is also seen as a means of testing capabilities China will use in future crewed missions to the Moon, notably the use of a lunar orbit rendezvous. In all, it comprises four elements: an orbiter, a lander, and ascent module and a sample return module.

Launched together, the elements will fly to the mood where the lander and ascent module will separate and land on the Moon on Mons Rümker, a volcanic formation in Oceanus Procellarum on the lunar nearside. Among its science tasks, the lander will collect some 2 kg of samples and transfer them to the 120 kg ascent module. This will then be launched back into lunar orbit to conduct a fully automated rendezvous with the orbiter – the first time such a robotic rendezvous has been performed in lunar orbit, and seen as a technique likely to be used in later crewed missions to the Moon.
Once mated to the orbiter, the ascent vehicle will transfer its sample payload to the sample return module before being jettisoned. The orbiter / sample return module will then return to Earth, the module detaching from the orbiter to enter the atmosphere and make a landing by parachute to allow recovery of the sample payload.
This mission had been intended to launch at the end of 2017, but it requires China’s powerful Long March 5 vehicle – which suffered a catastrophic failure of the YF-77 first stage engines, resulting in the vehicle’s loss in only its second operational launch in mid-2017. Since then, the YF-77 motor has had to be completely re-designed, and the Long March 5 is due to re-enter service in later December 2019.
The delay in getting the Long March 5 back to operational status means that Chang’e-5 is now sitting behind a series of launches China is planning for the rocket in 2020. These include a test launch of the uprated Long March 5B, a test flight of the orbital version of China’s new crewed launch vehicle, the launch of the Tianhe, core module of China’s new space station, and the launch of the country’s first robotic mission to Mars (which must take place mid-year).
Should Chang’e-5 fail for any reason, Chang’e-6, a duplicate mission, will be launched in early 2021. However, if Chang’e-5 succeeds, Chang’e-6 will be re-purposed to fly a further mission to the South Polar region of the Moon. In addition, China has stated that with Chang’e-7, it plans to commence an extended series of orbital and lander missions with the aim of establishing a “robotic research station” on the Moon in the latter half of the 2020s as a precursor to crewed landings.

In the meantime, the Chang’e-4 far side lander and rover mission completed its 11th lunar day of activities on November 3rd, 2019. The Yutu-2 rover has now travelled some 289 metres, and during October provided images of the “weird” material it had been reported as finding in a small crater in August 2019.
Analysis of the images has led to a general consensus that the materials is likely impact glass, the result of the heat generated during the impact that created the shallow crater. This is further supported by the general shape of the material being similar to that of the surrounding ejecta from the crater, further suggesting it formed at the same time as the result of the material in and around the crater.
Driving A Rover from Orbit
As well as autonomous rover vehicles operating on the Moon, there are plans to use teleoperated rovers in support of human missions both on the Moon and Mars. These would utilise rover vehicles operated by “drivers” located either in an base on the surface or in an orbiting space station / vehicle.
Such an approach to using rovers is not new – the Soviet Lunokhod-2 rover from the 1970s was “driven” in real-time by a team on Earth, for example, but having the capability used with a human lunar mission or Mars mission could be of significant benefit. They could be used to directly explore potentially hazardous areas before risking the crew setting foot in them, for example, or they could be used to carry out basic operations outside of a base without the crew needing to perform EVAs, etc.
However, operating a rover from an orbital platform in particular brings a specific set of challenges: there is a limited amount of time when the platform is “above the horizon” relative to the rover to make communication with, and operation of, the rover possible, for example.
So, in November 2019, ESA astronaut Luca Parmitano who is currently aboard the International Space Station, will attempt to control a ground-based rover analogue vehicle and use it to carry out a series of tasks, including piloting the rover across a simulated lunar surface and using its robot arm to collect samples for “analysis”. As well as testing how well the vehicle can be operated, the experiment will test how well Parmitano responds to haptic feedback from the rover whilst being in microgravity, where the human sense of touch is somewhat different.

That Viper looks like it could almost belong in Second Life.
LikeLike
The finished version will look like a box on wheels in the current designe, but there is something SL-ish about the test article / prototype chassis 🙂 .
LikeLike