 After six months in “Yellowknife Bay”, Curiosity is getting ready to move on. Investigations in the area are due to come to an end in the near future, and with the new autonomous driving software now installed in the rover, it is anticipated that the long drive to “Mount Sharp” will begin very soon. The start of this phase of the mission will be marked by the Rover retracing its steps (tracks?) through “Glenelg”, the region so-named partially because it is a palindrome, reflecting the fact the rover would be driving through it twice.
After six months in “Yellowknife Bay”, Curiosity is getting ready to move on. Investigations in the area are due to come to an end in the near future, and with the new autonomous driving software now installed in the rover, it is anticipated that the long drive to “Mount Sharp” will begin very soon. The start of this phase of the mission will be marked by the Rover retracing its steps (tracks?) through “Glenelg”, the region so-named partially because it is a palindrome, reflecting the fact the rover would be driving through it twice.
How long the rover will take to get to “Mount Sharp” is entirely open to question, however. While Curiosity is now far more capable of autonomous navigation, it won’t be a case of “pick and route which looks good and go”. If nothing else, there is no way of knowing what the rover might discover while en route.
“We don’t know when we’ll get to Mount Sharp,” Mars Science Laboratory Project Manager Jim Erickson said at the Jet Propulsion Laboratory in Pasadena, California. “This truly is a mission of exploration, so just because our end goal is Mount Sharp doesn’t mean we’re not going to investigate interesting features along the way.”

In May, Curiosity completed a second drilling operation to obtain samples from inside an area of bedrock called “Cumberland” within “Yellowknife Bay”, delivering them to the Chemistry and Minerology (CheMin) and Sample Analysis at Mars SAM) suites of instruments aboard the rover for detailed analysis. This work is still ongoing, and it is hoped that the result will further confirm findings obtained as a result of the first drilling operation, carried out a few metres away on a rock formation dubbed “John Klein”, and which suggested that the area once had environmental conditions favourable for microbial life.
No further drilling operations are now planned for the area, although NASA has yet to give word on the results from the initial analysis of the “Cumberland” cuttings. Additionally, once the order is given to start the drive towards “Mount Sharp”, the rover will retain cuttings from the “Cumberland” drilling ins its sample scoop which can be delivered to CheMin and SAM for additional analysis, if required.
Both drilling operations have been important steps for the MSL mission. Not only have they been a successful test / use of the last remain major science capability on the rover (the ability to drill into rocks and obtain samples), they’ve also been an important learning situation for mission engineers. Steps which each took a day each to complete when drilling at “John Klein” could be strung together into a single sequence of commands at “Cumberland”, allowing the rover to complete a number of drilling-related tasks autonomously and in a single day.
“We used the experience and lessons from our first drilling campaign, as well as new cached sample capabilities, to do the second drill campaign far more efficiently,” said sampling activity lead Joe Melko of JPL. “In addition, we increased use of the rover’s autonomous self-protection. This allowed more activities to be strung together before the ground team had to check in on the rover.”

It’s hoped that these capabilities will allow the mission team to plan future routines for the rover more efficiently and in the knowledge that Curiosity has the ability to carry out multiple tasks without the need to “‘phone home” at each stage of an operation, something which introduces considerable delays in activities as a result of the two-way communications lag.
Prior to leaving “Yellowknife Bay”, two further “targets of opportunity” will be subject to brief observations by Curiosity. The first of these is a layered outcrop dubbed “Shaler”, which was briefly looked at as the rover initially entered the “Glenelg” / “Yellowknife Bay” region, and a pitted outcrop called “Point Lake”
The science team has chosen three targets for brief observations before Curiosity leaves the Glenelg area: the boundary between bedrock areas of mudstone and sandstone, a layered outcrop called “Shaler”, a possible river deposit, and a pitted outcrop called “Point Lake”, a depressional area thought to be either volcanic or sedimentary in nature, and which the rover observed when entering “Yellowknife Bay” from “Glenelg”.
Turning Back the Clock
In the meantime, detailed earth-based analysis of findings and images returned Curiosity’s first 40 days on Mars have confirmed the rover had found the first ever streambed gravels on Mars.
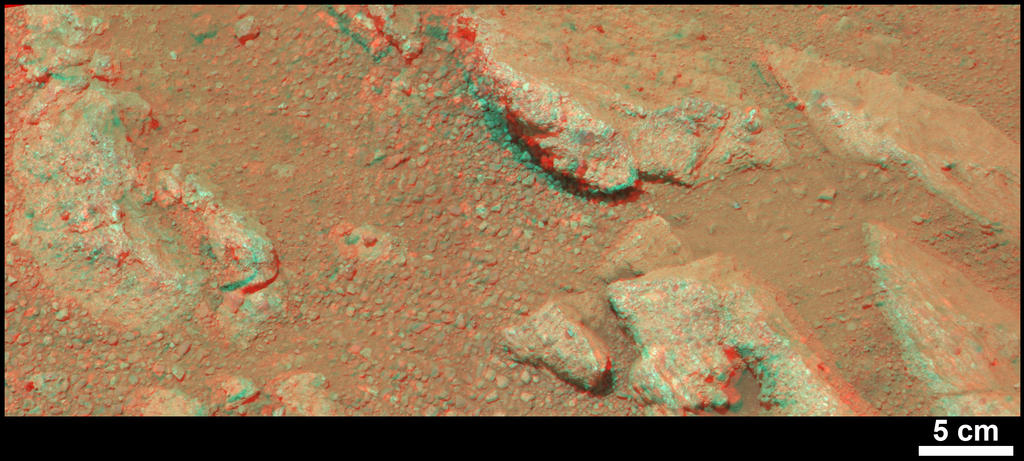
Three pavement-like rocks were examined with the telephoto capability of Curiosity’s Mast Camera (Mastcam), and using the instrument’s 3D capability, as well as by the Chemistry and Camera (ChemCam) instruments located at the top of the rover’s mast. The first of these rocks, dubbed “Goulburn,” lay immediately adjacent to the “Bradbury Landing” touchdown site. The other two, “Link” and “Hottah,” lay some 50 and 100 metres (165 and 330 feet), respectively, to the south-east of the landing zone.
“We completed more rigorous quantification of the outcrops to characterize the size distribution and roundness of the pebbles and sand that make up these conglomerates,” said Rebecca Williams of the Planetary Science Institute in Tucson, Arizona, lead author of a report into the rocks which appeared in the journal Science at the end on May. “We ended up with a calculation in the same range as our initial estimate last fall. At a minimum, the stream was flowing at a speed equivalent to a walking pace — a meter, or three feet, per second — and it was ankle-deep to hip-deep.”
The larger pebbles are not distributed evenly in the conglomerate rocks. In Hottah, researchers detected alternating pebble-rich layers and sand layers. This is common in streambed deposits on Earth and provides additional evidence for stream flow on Mars. In addition, many of the pebbles are touching each other, a sign that they rolled along the bed of a stream.
“Our analysis of the amount of rounding of the pebbles provided further information,” said Sanjeev Gupta of Imperial College, London, a co-author of the new report. “The rounding indicates sustained flow. It occurs as pebbles hit each other multiple times. This wasn’t a one-off flow. It was sustained, certainly more than weeks or months, though we can’t say exactly how long.”
Today, Mars’ atmosphere is far too thin to sustain liquid water on the surface of Mars, although the planet does have large quantities of water ice locked within it, such as in permafrost beneath the surface. The surface of Mars also has considerable evidence to suggest liquid water may once flowed freely across the planet, but scientists have always had to consider other possible means by which such surface features might have formed other than by long-term water erosion. The detailed analysis of these rocks therefore marks the first clear indication that atmospheric conditions on the planet once enabled the flow of liquid water on the Martian surface.
Scientists are now keen to see if Curiosity finds similar deposits at either “Shaler” or “Point Lake”.
Of RADs and MilliSieverts
The MSL mission didn’t start with Curiosity’s arrival on Mars. An important part of the mission took place when the mission was still en route to the Red Planet, as a part of attempts to better understand the nature of interplanetary space, and the kind of radiation levels which might be encountered by a human crew travelling to and from Mars.
The rover is equipped with an instrument called the Radiation Assessment Detector (RAD), which was operating throughout the cruise phase of the mission as the MSL vehicle travelled to Mars, allowing scientists to gather comprehensive data on the radiation environment human crews will one day encounter – and they revealed that cumulative radiation could exceed current safety margins for space missions.
There are two forms of radiation which pose potential health risks to astronauts in deep space. One is galactic cosmic rays (GCRs), particles caused by supernova explosions and other high-energy events outside the solar system. The other is solar energetic particles (SEPs) associated with solar flares and coronal mass ejections from the sun.
SEPs can be guarded against to some degree. The European Space Agency has carried out studies using polyurethane nanocomposite films as a means of “blocking” solar radiation, while it has also been suggested that water tanks surrounding the living environment of a space vehicle carrying people to Mars would also provide additional shielding, while an enhanced “solar shelter” could be incorporated into some vehicle designs for protection against the Sun’s more violent outbursts.

However, it is much harder to protect vehicle interiors from GCRs. These are highly energetic, highly penetrating particles that are not stopped by the modest shielding provided by a typical spacecraft.
Radiation exposure is measured in units of Sievert (Sv) or milliSievert (one one-thousandth Sv). A 1 Sv exposure accumulated over time is associated with a five percent increase in risk for developing fatal cancer. NASA has established a three percent increased risk of fatal cancer as an acceptable career limit for its astronauts currently operating in low-Earth orbit, where the Earth’s magnetosphere provides additional protection from the ravages of both SEPs and GCRs.
The RAD data showed the Curiosity rover was exposed to an average of 1.8 milliSieverts of GCR per day on its journey to Mars. Only about three percent of the radiation dose was associated with solar particles because of a relatively quiet solar cycle and the shielding provided by the spacecraft. That means that on a typical 500+ day mission to Mars and back, a human crew could be exposed to radiation levels around or above 1 Sv.
“In terms of accumulated dose, it’s like getting a whole-body CT scan once every five or six days,” said Cary Zeitlin, a principal scientist at the Southwest Research Institute (SwRI) in San Antonio and lead author of the paper on the findings. “Understanding the radiation environment inside a spacecraft carrying humans to Mars or other deep space destinations is critical for planning future crewed missions.”

“Scientists need to validate theories and models with actual measurements, which RAD is now providing,” Donald M. Hassler, a programme director at SwRI and principal investigator of the RAD investigation added. “These measurements will be used to better understand how radiation travels through deep space and how it is affected and changed by the spacecraft structure itself. The spacecraft protects somewhat against lower energy particles, but others can propagate through the structure unchanged or break down into secondary particles.”
With the rover now on Mars, RAD continues to operate, gathering further data on thew overall radiation environment on the surface of the planet, thus allowing scientists gain an even greater perspective on the overall radiation regime human explorers are liable to encounter once we do start exploring the Red planet for ourselves.
Curiosity reports in this blog
All images courtesy NASA / JPL unless otherwise indicated

Yay! New space exploration-related post!
LikeLike
I forgot it was half-written from last week.
LikeLike
/me rummages through the storage room for cyborg memory expansions – perhaps something could be compatible with You… 😛
LikeLike