On Sol 376, August 27th 2013, Curiosity achieved another mission milestone: the first use of the autonomous driving capabilities to fully drive itself through a potentially hazardous zone.
On Sol 376, August 27th 2013, Curiosity achieved another mission milestone: the first use of the autonomous driving capabilities to fully drive itself through a potentially hazardous zone.
The autonomous navigation software – autonav – was uploaded to the rover following the April 2013 period of solar conjunction. It is designed to allow the rover to decide how best to handle driving safely on Mars, rather than constantly relying on command updates from Earth – something which can severely limit the rover’s daily progress if there are significant obstacles in the rover’s path or if the mission team want the rover to drive beyond the limits of what the Navcams can see at the start of a day’s drive without routes having to be constantly re-plotted from Earth.
The drive of August 27th saw Curiosity successfully use autonomous navigation to cross ground that could not be confirmed safe before the start of the drive. While the drive team were able to establish a “bounding box” in which the rover was expected to keep during the day’s progress, a significant depression in the ground some 10 metres (33 feet) across could not be imaged in advance of the rover’s arrival, and so autonav was enabled in order for the rover to make its own way through the depression.
“We could see the area before the dip, and we told the rover where to drive on that part. We could see the ground on the other side, where we designated a point for the rover to end the drive, but Curiosity figured out for herself how to drive the uncharted part in between,” said JPL’s John Wright, a rover driver.

Crossing the depression required the rover to take several sets of stereo images of the terrain, compare them, determine potential routes to reach a the designated way-point, and then select the safest course to take.
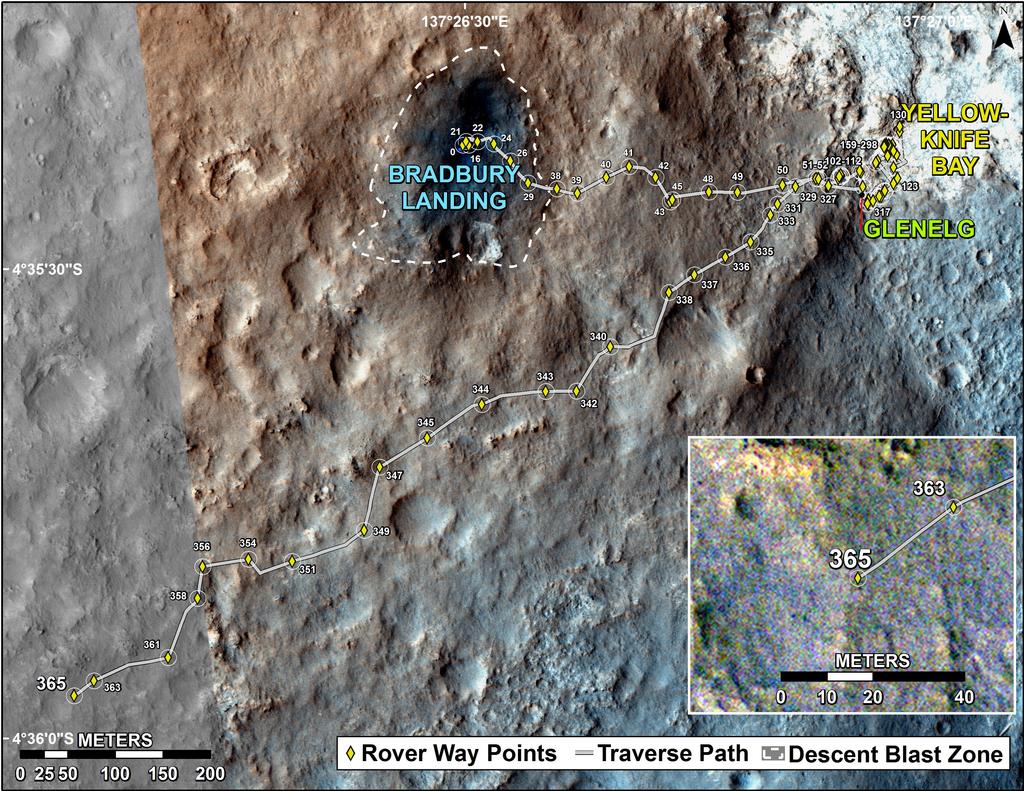
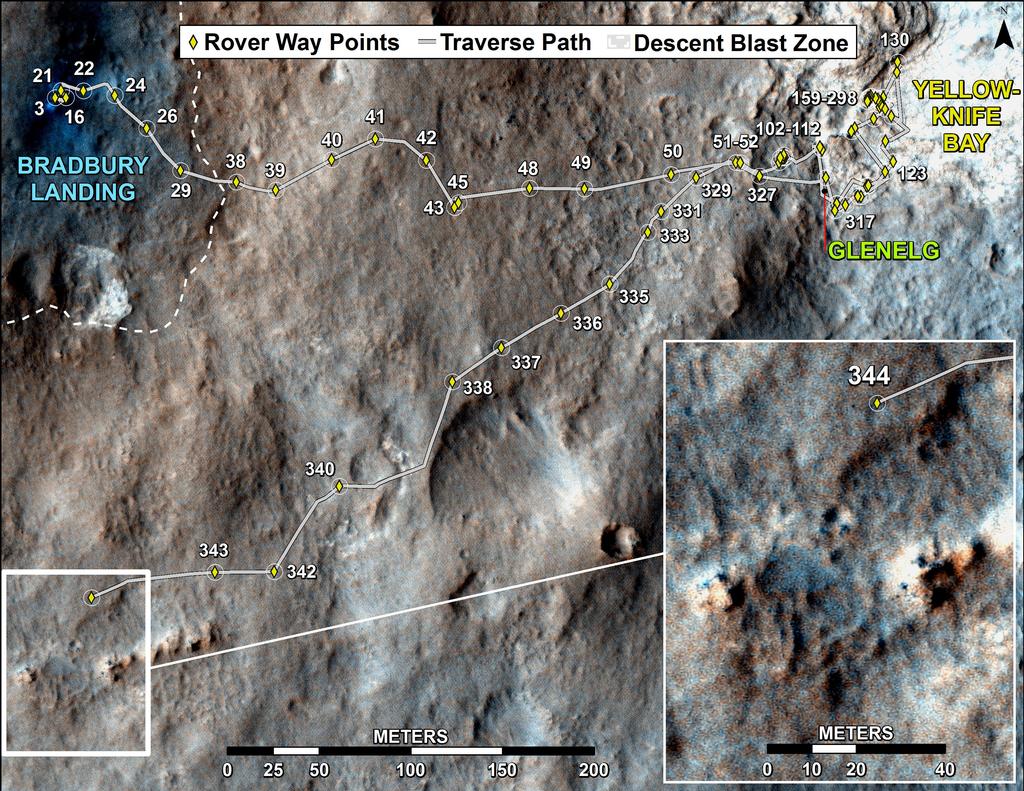
While autonav has been used a number of times already in recent weeks, these have always been under controlled conditions and limited in scope. The Sol 376 traverse marks the first time Curiosity has been left entirely to its own devices to cross what has essentially been unknown ground for the mission team. The drive means that the rover has now travelled about 1.39 kilometres (0.86 miles) since departing “Glenelg” and “Yellowknife Bay” early in July, and has a little over 7 kilometres (4.46 miles) to go before reaching the lower slopes of “Mount Sharp”.
Rapid Transit Route
To assist the rover’s progress, NASA have marked-out a “rapid transit route” using images from the High Resolution Imaging Science Experiment (HiRISE) camera aboard the orbiting Mars Reconnaissance Orbiter. This plots a rough course for the rover from “Glenelg” to the designated entry-point into the lower slopes of “Mount Sharp”, and which runs alongside a dune field which lays between the terrain the rover is on and the slopes of the mound itself. Several potential waypoints have been identified along the route where the rover may stop for a few days at a time to allow further science work to be carried out.