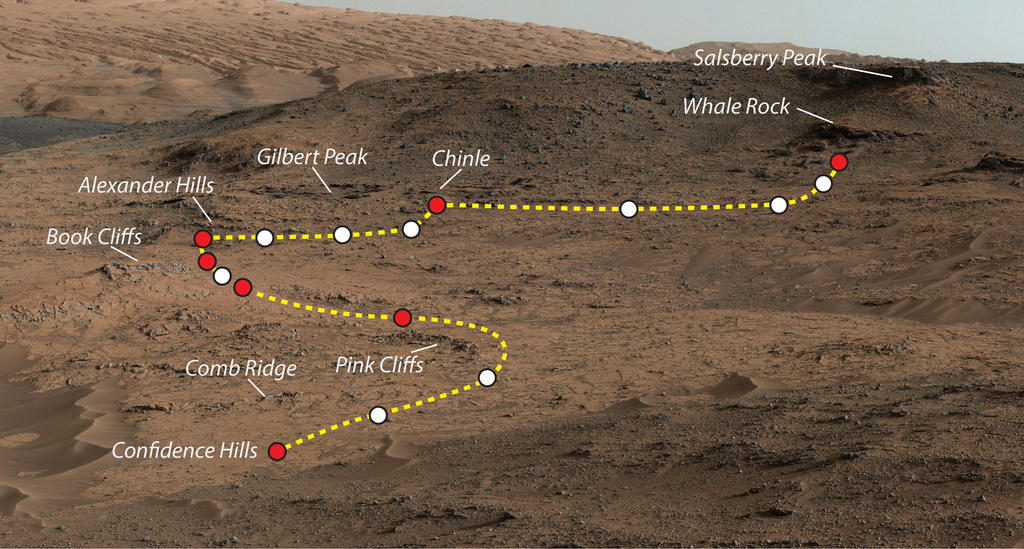
In my last report on the Mars Science Laboratory, I mentioned that Curiosity has been on a geology “walkabout” up the slopes of the “Pahrump Hills” at the base of “Mount Sharp” (more correctly, Aeolis Mons). The zigzagging route up through the area took the rover from “Confidence Hills” and the location of the last drilling operation up to a point dubbed “Whale Rock”, the drive being used to gather information on potential points of interest for further detailed examination.
In my last report on the Mars Science Laboratory, I mentioned that Curiosity has been on a geology “walkabout” up the slopes of the “Pahrump Hills” at the base of “Mount Sharp” (more correctly, Aeolis Mons). The zigzagging route up through the area took the rover from “Confidence Hills” and the location of the last drilling operation up to a point dubbed “Whale Rock”, the drive being used to gather information on potential points of interest for further detailed examination.
The exposed rocks in this transitional layering between the floor of Gale Crater, in which Curiosity arrived back in August 2012, and the higher slopes of “Mount Sharp” is expected to hold evidence about dramatic changes in the environmental evolution of Mars. Thus, the “walkabout” – a common practice in field geology on Earth – was seen as the best means of carrying out a reasonable analysis of the area in order for the rover to be most efficiently targeted at specific locations of interest.
“We’ve seen a diversity of textures in this outcrop,” Curiosity’s deputy scientist Ashwin Vasavada (JPL) said of the drive. “Some parts finely layered and fine-grained, others more blocky with erosion-resistant ledges. Overlaid on that structure are compositional variations. Some of those variations were detected with our spectrometer. Others show themselves as apparent differences in cementation or as mineral veins. There’s a lot to study here.”
During the drive, Curiosity travelled some 110 metres, with an elevation of about 9 metres, using the Mastcam and the ChemCam (Chemistry and Camera) laser spectrometer system to inspect and test potential points of interest for more detailed examination at a later date. Since completing that drive, the rover has been working its way back through Pahrump Hills, this time examining specific targets using the robot-arm mounted Mars Hand Lens Imager (MAHLI) camera and spectrometer. Once this work has been completed, specific targets for in-depth analysis, including drilling for samples will for the core activity of a third pass through the area.
So far, two specific areas have been identified for detailed examination. The first, dubbed “Pelona” is a fine-grained, finely layered rock close to the “Confidence Hills” drilling location. The second is a small erosion-resistant ridge dubbed “Pink Cliffs” the rover drove around on its way up the incline.

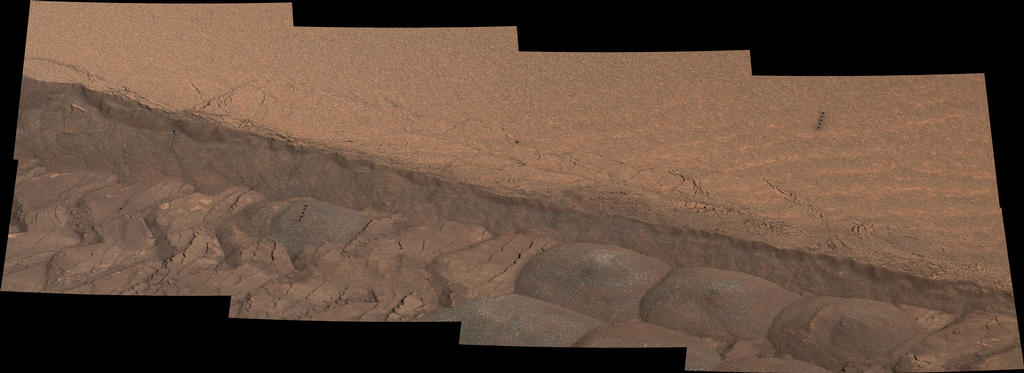
Another target of investigation has been the edge of a series of sand and dust dunes right on the edge of “Pahrump Hills”. In August 2014, Curiosity attempted to use these dunes as a means to more quickly access the “Pahrump Hills” area, but the effort had to be abandoned when it proved far harder for the rover to maintain traction than had been anticipated, particularly given the rover has successfully negotiated sandy dunes and ridges earlier in the mission. As a result, scientists are keep to understand more about the composition of the dunes.
On November 7th, Curiosity was ordered to venture onto the dunes very briefly in order to break the surface of one of the rippled dunes and expose the underlying layers of sand in an effort to better understand why the rover found the sand such hard going the first time around, and what might be within these wind-formed dunes that would prove to be so bothersome to driving over them. Data gathered from the drive is still being analysed.
The work in the “Pahrump Hills” area has given rise to concerns over one of the two lasers in the ChemCam instrument. As well as the main laser, known for “zapping” targets on the surface of Mars in order to reveal their chemical and mineral composition, the system uses a second laser, a continuous wave laser, used for focusing the ChemCam’s telescope to ensure the plasma flash of vaporised rock is properly imaged when the main laser fires. Data received on Earth when using the ChemCam to examine rocks on the first pass through “Pahrump Hills” suggests this smaller laser is weakening and may no longer be able to perform adequately.
If this is the case, the laser team plan to switch to using an auto-focus capability with the telescope so it will automatically focus itself on a few “targeting” shots from the main laser ahead of any data-gathering burst of fire, allowing for proper telescope calibration.
Continue reading “Of Martian walkabouts, pictures from a comet, and getting ready to fly”