The progress of NASA’s Curiosity rover on Mars has slowed somewhat in January, the rover having covered around 265 metres (865 feet) in the month, bringing the total distance Curiosity has travelled since arriving on Mars in august 2012 to some 4.89 kilometres (3.04 miles).
The progress of NASA’s Curiosity rover on Mars has slowed somewhat in January, the rover having covered around 265 metres (865 feet) in the month, bringing the total distance Curiosity has travelled since arriving on Mars in august 2012 to some 4.89 kilometres (3.04 miles).
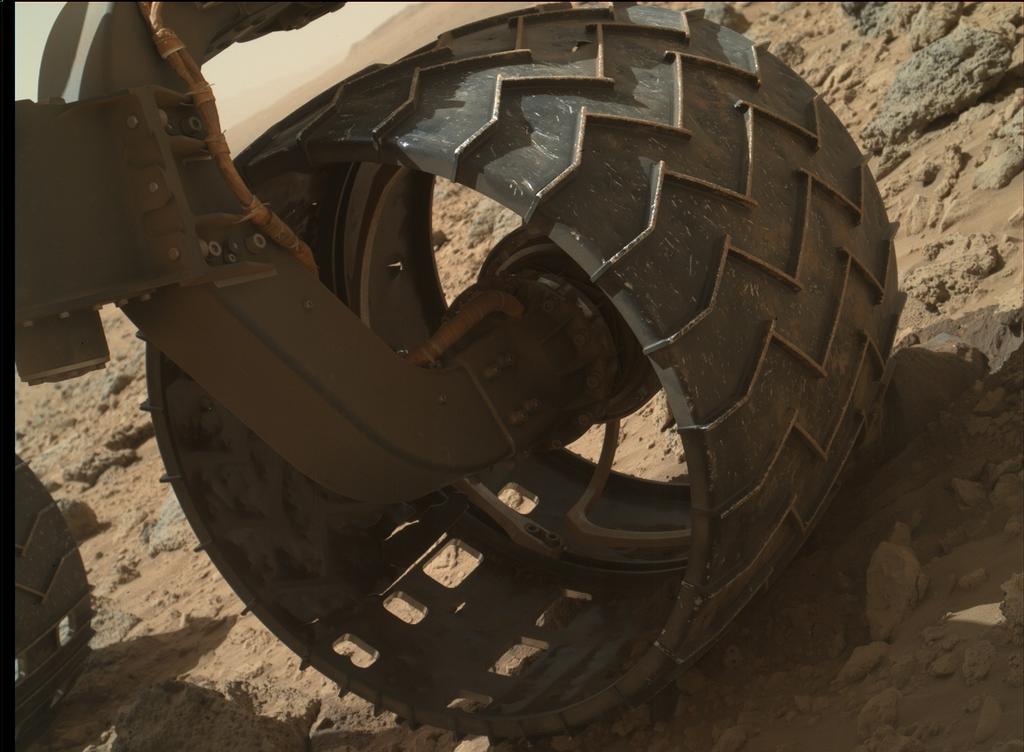
Part of the reason for the slow-down has been due to the recent traverse of considerably rougher terrain during the rover’s trek towards its encounter with “Mount Sharp” having resulted in somewhat more wear-and-tear of the aluminium wheels than had perhaps been anticipated.
While not of a serious concern – the rover can function with quite substantial damage having being done to the wheels – the mission team has nevertheless been looking for ways and means for the rover’s progress to continue at a reasonable pace, but without exposing the wheels to excessively rugged terrain.
Most recently, this has involved examining a possible gateway to a smoother route down to the point at which they plan to commence explorations of “Mount Sharp’s” lower slopes. This gateway is a 1-metre (3-ft) high sand dune sitting between two rocky scarps. Dubbed “Dingo Gap”, the dune appears to provide access to a smoother route heading south-west and towards the rover’s ultimate destination.

“The decision hasn’t been made yet, but it is prudent to go check,” said Jim Erickson, NASA’s project manager for Curiosity. on January 28th. “We’ll take a peek over the dune into the valley immediately to the west to see whether the terrain looks as good as the analysis of orbital images implies.” The orbital images he referred to came from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter, while the “closer look” actually took place on January 30th.
In addition to using alternative routes, the drive team has also been evaluating possible driving techniques that might help reduce the rate of wheel punctures, such as driving backwards or using four-wheel drive instead of six-wheel drive. This may help is situations where some of the wheel damage may have resulted from the force of the rear wheels pushing the middle or front wheels against sharp rocks, rather than simply the weight of the rover driving over the rocks.
As a result of the slow-down, JPL are considering introducing some evening and weekend drives into the February drive schedule.

More Drilling
As well as providing a route southwards, Dingo Gap may also allow the rover easier access to its next waypoint on the journey, where it is expected to carry out further drilling and sample-gathering activities. The site, identified as “KMS-9” is around 800 metres (half-a-mile) from Curiosity’s current position when measured in a straight line – but that is over rugged terrain the mission team would potentially avoid if possible.
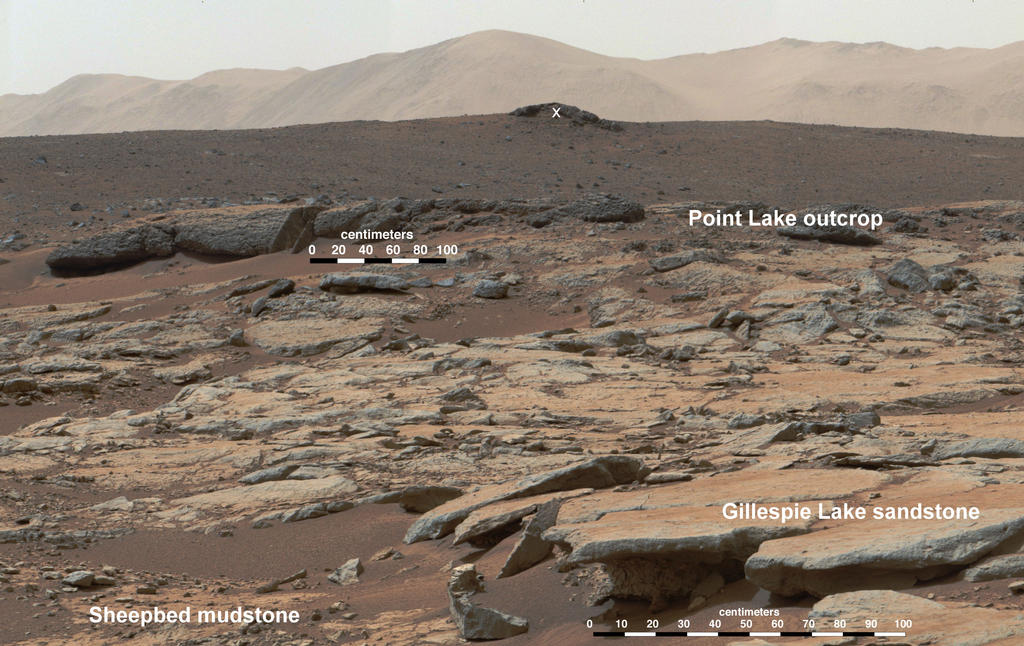
The drilling site has been imaged from orbit, and holds significant appeal to the mission team, as Katie Stack, a science team collaborator explained. “At KMS-9, we see three terrain types exposed and a relatively dust-free surface. This area is appealing because we can see terrain units unlike any that Curiosity has visited so far. One unit has striations all oriented in a similar direction. Another is smooth, without striations. We don’t know yet what they are. The big draw is exploration and seeing new things.”
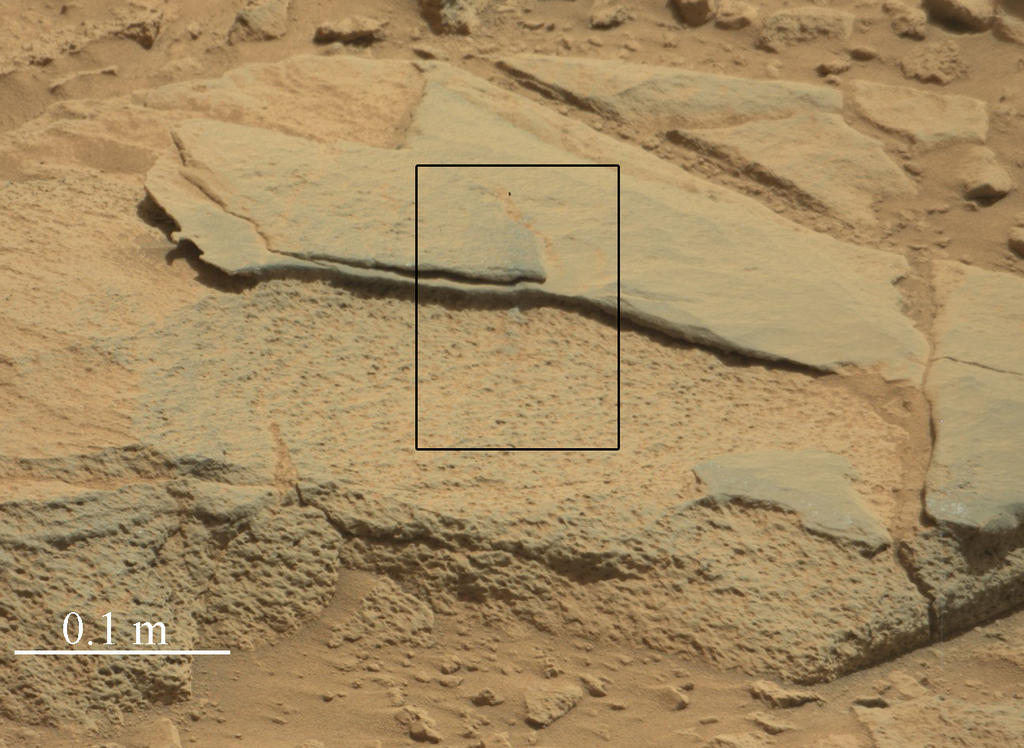
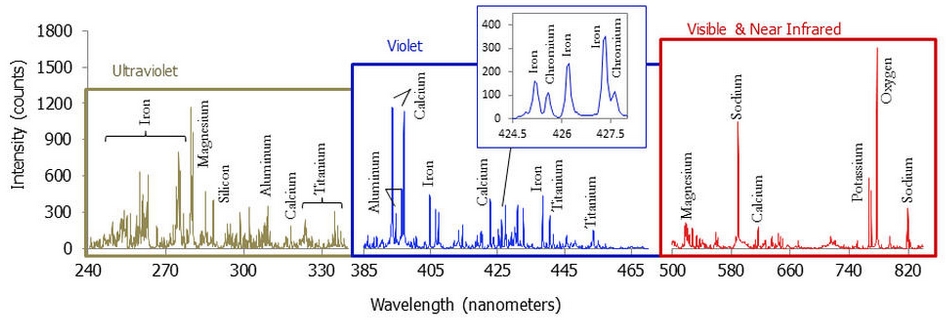
“KMS-9” won’t be the first rocky area examined by Curiosity in 2014. On January 15th, the rover examined a rock dubbed “Harrison”, which revealed linear crystals with feldspar-rich composition.
Earth-side Tests
At the same time as the efforts to select a candidate route have been underway, other members of the team have been carrying out further tests to validate capabilities for the rover to drill for rock samples on the kind of slopes it will likely encounter when exploring and climbing “Mount Sharp”.
In particular, the tests have been focused on the drill mechanism’s ability to withstand damage as a result of slippage when the rover is parked on a sloping surface. So far, results have shown that the drill mechanism can withstand slippage of around 5 centimetres (2 inches) in the rover’s position without any real damage occurring. Such slippage could be induced through a number of circumstances, including the angle of slope, cumulative damage to the wheels which may impact their ability to grip the surface beneath them, and material on the surface which may also impact the rover’s ability to sustain a solid grip on underlying rock.