Things are starting to pick-up on Mars once more as Curiosity starts into a new round of science studies in the region dubbed “The Kimberley”. Having been surveying the region since its arrival there at the beginning of April, the rover was commanded to move to a sandstone slab scientists dubbed “Windjana” after a gorge in Western Australia, and is in keeping with giving notable landmarks in the area unofficial names lifted from that part of Australia.
Things are starting to pick-up on Mars once more as Curiosity starts into a new round of science studies in the region dubbed “The Kimberley”. Having been surveying the region since its arrival there at the beginning of April, the rover was commanded to move to a sandstone slab scientists dubbed “Windjana” after a gorge in Western Australia, and is in keeping with giving notable landmarks in the area unofficial names lifted from that part of Australia.
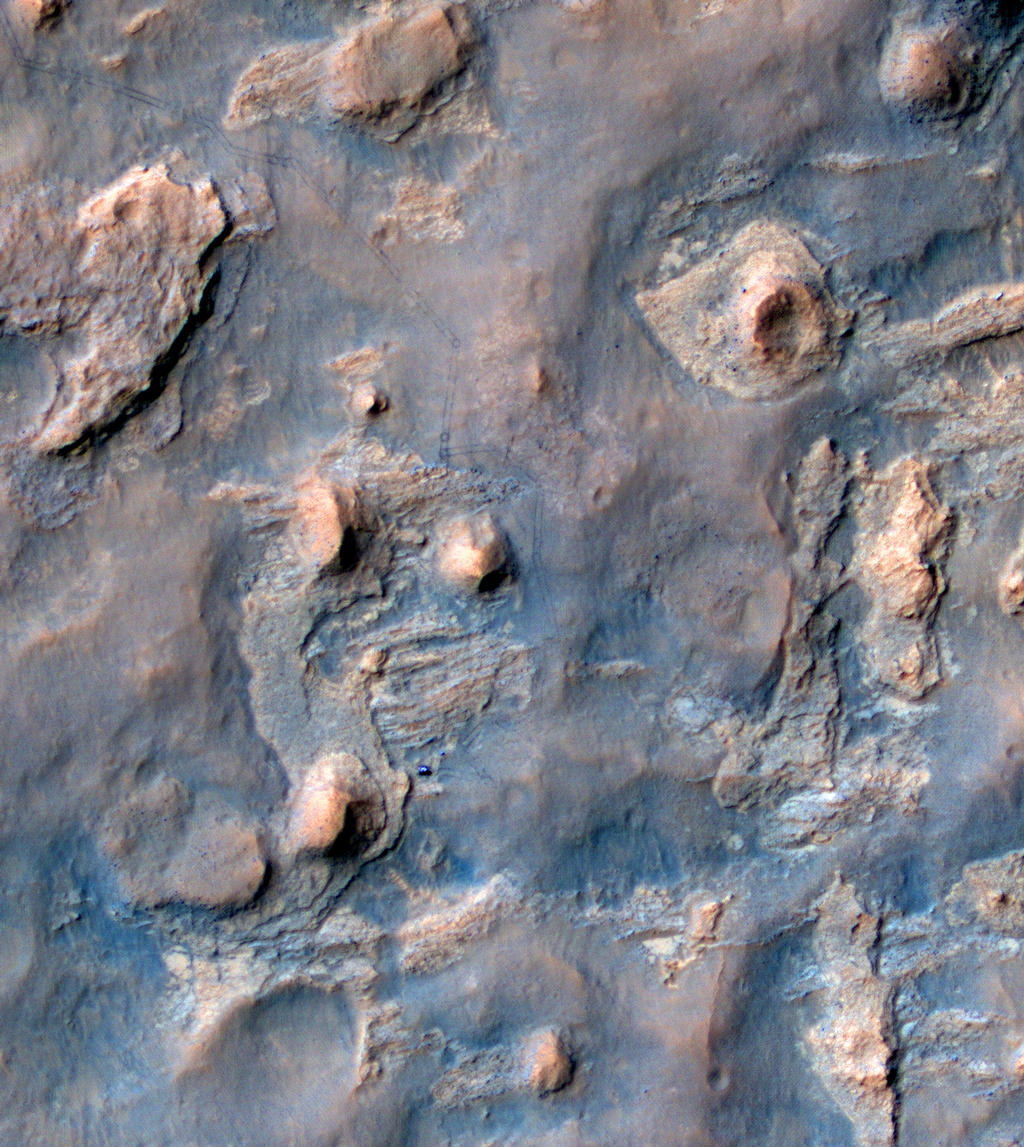
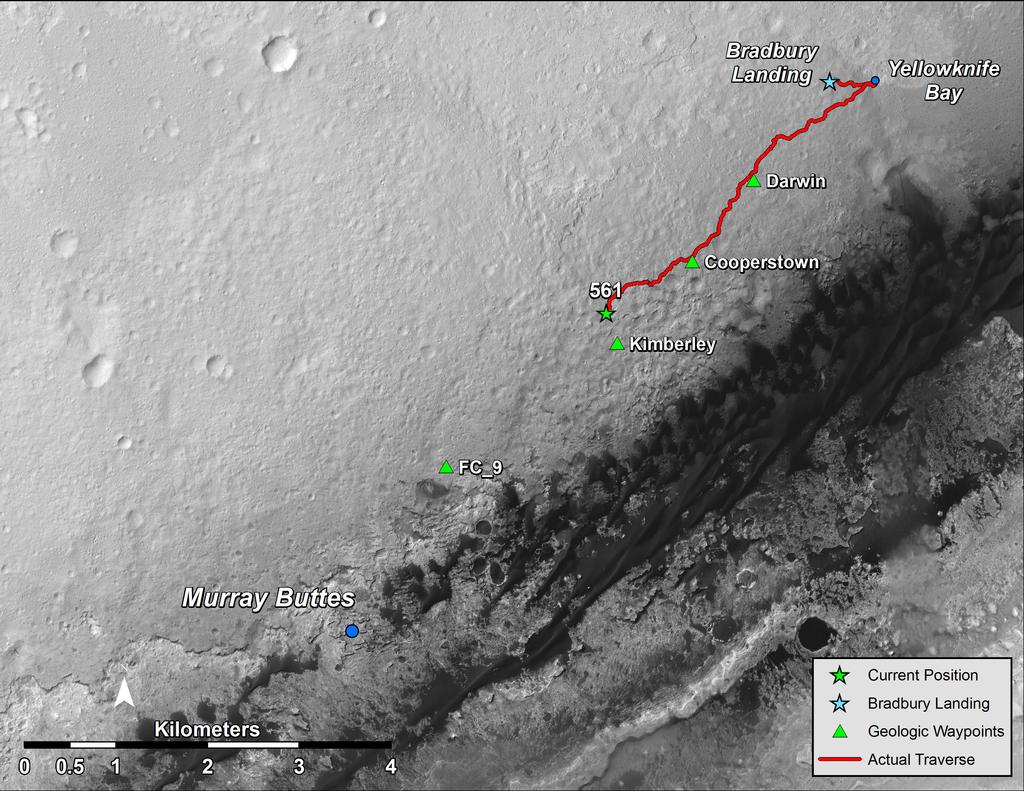
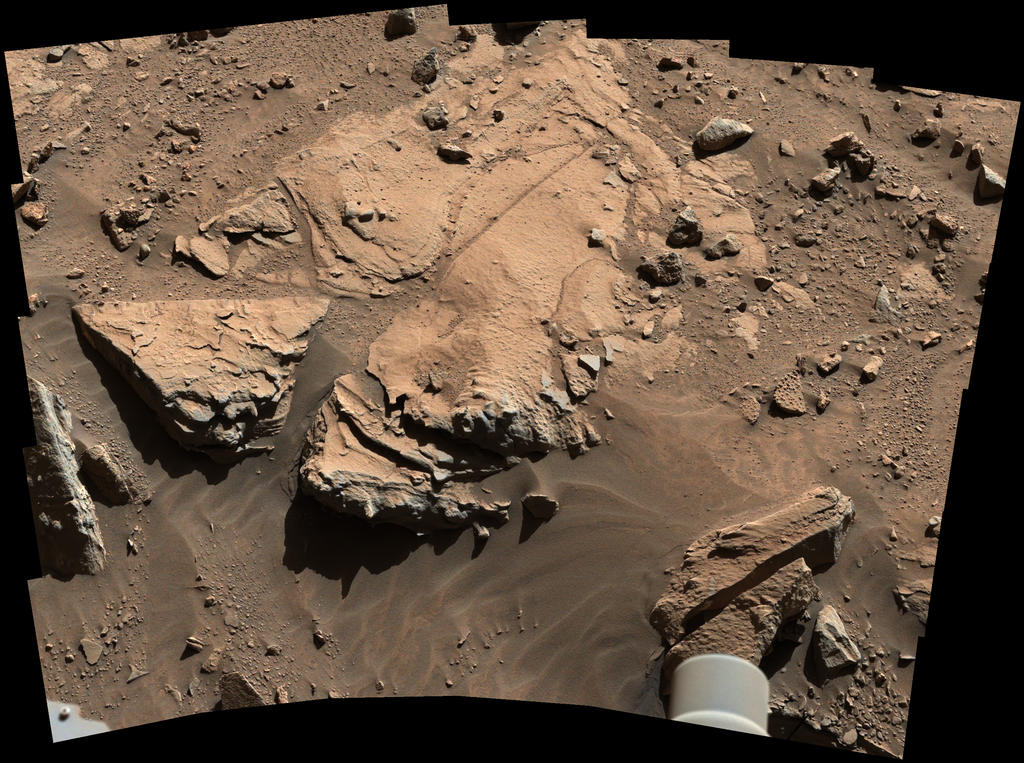
The slab lay a short distance roughly southwards from the rover’s position where the Mars Reconnaissance Orbiter (MRO) imaged it on April 11th, 2014. Following the initial selection of the slab as an area for further study, the rover was commanded to drive closer to it to enable further visual inspection. The slab is around 60 centimetres (2 feet) across, and was selected because it offered a good surface for drilling, and lay within what scientists call the “middle unit” because its location is intermediate between rocks that form buttes in the area and lower-lying rocks that show a pattern of striations.
The sandstone rock in the area is of particular interest to mission scientists because it represents a somewhat different environment to that studied extensively by Curiosity during the time it spent in the “Yellowknife Bay” area, drilling and sampling mudstone rocks.
“We want to learn more about the wet process that turned sand deposits into sandstone here,” Curiosity’s lead Project Scientist, John Grotzinger, explained. “What was the composition of the fluids that bound the grains together? That aqueous chemistry is part of the habitability story we’re investigating.”
Understanding why some sandstones in the area are harder than others also could help explain major shapes of the landscape where Curiosity is working inside Gale Crater. Erosion-resistant sandstone forms a capping layer of mesas and buttes. It could even hold hints about why Gale Crater has a large layered mountain, dubbed “Mount Sharp” (officially called Aeolis Mons), at its centre.
Once the rover had positioned itself close to the rock, initial inspection operations were carried out, which included using the turret-mounted spectrometer on Curiosity’s robot arm as well as the mast-mounted ChemCham laser so that the rock could be properly analysed ahead of any drilling operation. These operations also included deploying the rover’s “wire brush” to clean an area of the rock’s surface, removing dust and debris to expose the rock itself, allowing for further examination and analysis.

Before any sample drilling could occur, however, the rover would need to carry out a “mini-drilling” operation, much as it did at “Yellowknife Bay”. Such operations both confirm the drill’s readiness for sample gathering and confirm that the subject rock is a suitable target for drilling and gathering sample material.
This “mini-drilling” operation took place on Tuesday, April 29th, cutting a hole around 2 centimetres (0.8 inch) deep into the rock. This allowed the science team to evaluate the interaction between the drill and this particular rock – an important factor given issues enountered due to vibration during the rover’s previous operations – and also for the tailings of powder rock created by the drilling operation to be examined for their suitability for collection by the drilling mechanism.
When collecting sample material, the rover’s hammering drill bores as deep as 6.4 centimetres (2.5 inches) into a target rock. As it does so, some of the tailings from the drilling operation are forced up into the drill bit itself, and delivered to one of two holding chambers (Chambers A and B in the diagram below) located in the head of the drill bit mechanism.

Once drilling is complete, the gathered samples are transferred to CHIMRA – the Collection and Handling for In-Situ Martian Rock Analysis system, also within the rover’s turret system, where the tailings are sifted and sorted ready for eventual transfer to the Curiosity’s on-board chemical laboratory systems, comprising the Chemical and Mineralogy (CheMin) and Sample Analysis at Mars (SAM) suites of instruments.
At the present time, the outcome of the analysis of the mini-drilling operation, and the suitable of “Windjana” as a sample-gathering point is unclear; however, it would appear likely that sample drilling operations will go ahead nearby as a result of this test.

First Asteroid Image from the Surface of Mars
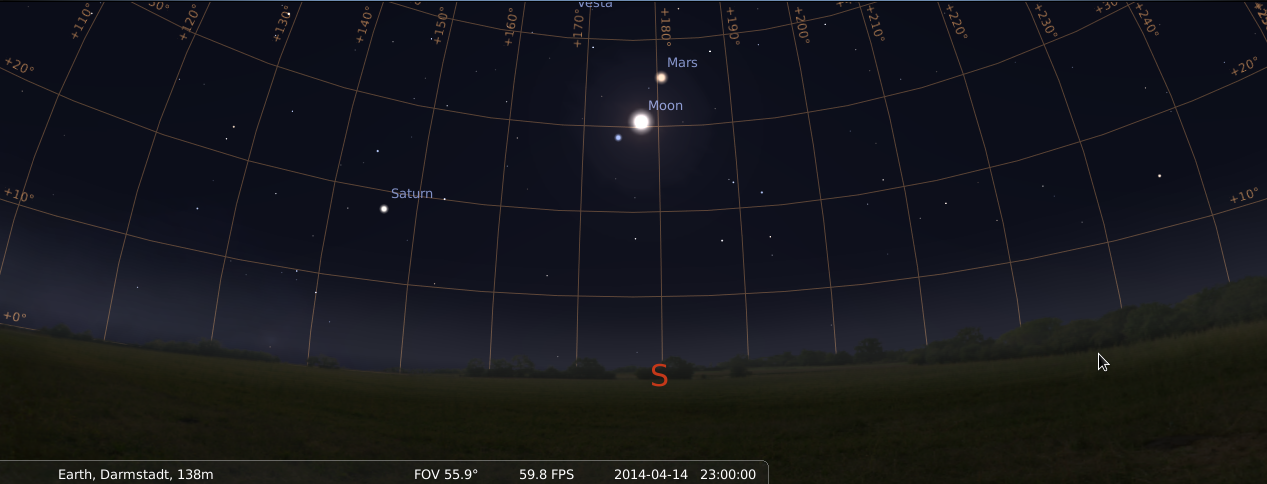
Curiosity racked-up another first on Sol 606 (April 20th), when the Mastcam captured the first image of asteroids taken from the surface of Mars. The image was combined with pictures captured the same night of the Martian Moons Phobos and Deimos, and the planets Jupiter and Saturn. Deimos, the outermost on the Martian moons, and which may have itself been an asteroid prior to wandering in Mars’ gravitational influence, appears at its correct location in the sky at the time the image of Ceres and Vista was captured. Phobos, Jupiter and Saturn, which were all imaged at different times, are shown as inset images on the left. All of the images form a part of ongoing astronomical work the rover has been performing periodically.
Ceres, with a diameter of about 950 kilometres (550 miles), is the largest object in the asteroid belt, large enough to be classified as a dwarf planet. Vesta is the third-largest object in the asteroid belt, about 563 kilometres (350 miles) wide. These two bodies are the destinations of NASA’s Dawn mission, which orbited Vesta in 2011 and 2012 and which is now on its way to begin orbiting Ceres in 2015.

The main image appears grainy, with Ceres, Vista and three stars appearing as streaks because it was captured over a 1-2 second exposure period. The graining on the image is the result of cosmic rays striking the camera detector is the image was captured. The images of Deimos, Phobos, Jupiter and Saturn were all captured over a much shorter 0.25-second exposure, thus rendering them as bright objects against a “clean” black background. Sunlight reflected by Deimos makes it appear overly large.
The interesting point (for those into astronomy) with the main image is that Vesta and Ceres would be naked-eye visible to anyone with average eyesight were they to be standing on the surface of Mars.
All images courtesy of NASA JPL.