Bears have long been a part of Second life tradition and history. Linden Bears are much sought after, and bears have been mascots for many activities and ventures.
Now Saffia brings word that Sway Dench, a long-time content creator in Second Life, has created a special One Billion Rising Bear, which will be a part of soon-to-be released Goodie Boxes which contain information and treats on the event, which will take place on February 14th.
In addition to the little, attachable bear, Sway has produced a larger bear which can be used as a OBR information vendor by stores sponsoring the event.
You can find out more about the bears and goodie boxes by keeping an eye on the OBR website.
Saffia and the OBR SL bears by Sway Dench (images courtesy of the OBR website)
Lance Corrimal has given a couple of short updates on the status of his efforts to get his Dolphin viewer back up to speed.
In a brief update on January 25th, he reported that the work had seen Dolphin gain:
Latest Viewer-Release+RLV
The Sailor’s Mini Map V2
Avatar name in the title bar
Several bugfixes
However, as he goes on to note, there’s still a fair amount still to be done, including: improved build tools and area search, the machinima floater and the Flickr upload capability, the inventory Worn tab and the advanced inventory search / filter, as well as things like viewer rebranding and preference pages for the Dolphin-specific features. Nevertheless, progress is being made.
In a further update on January 29th, he provides an update on Dolphin and openSUSE:
openSUSE 12.2 is officially End-Of-Life as of January 27, 2014. That means, I won’t be providing rpm packages of the Dolphin Viewer 3 for openSUSE 12.2 anymore. The last one available for openSUSE 12.2 will be 3.4.14.
That being said, if you are running openSUSE 12.3, and have been using the Dolphin Viewer 3 through packages from the RPM repository, try a “zypper install dolphinviewer3-beta” if you feel like it
Once I have an actual release, the beta version will uninstall itself, just like magic.
There’s still no actual release date on the horizon for an updated Dolphin; things are dependent upon RL and Lance’s work schedule – so please don’t ping him asking, “When?”! Suffice it to say that further updates will appear on the Dolphin blog as they become available.
This summary is published every Monday and is a list of SL viewer / client releases (official and TPV) made during the previous week. When reading it, please note:
It is based on my Viewer Round-up Page, a list of all Second Life viewers and clients that are in popular use (and of which I am aware) and which are recognised as adhering to the TPV Policy
By its nature, this summary will always be in arrears
The Viewer Round-up Page is updated as soon as I’m aware of any releases / changes to viewers & clients, and should be referred to for more up-to-date information
The Viewer Round-up Page also includes comprehensive links to download pages, blog notes, release notes, etc., as well as links to any / all reviews of specific viewers / clients made within this blog.
Official LL Viewers
Current Release version: no change (version 3.6.13.284995, formerly the PackageFix RC)
Release notes (all) – core updates: backports from Singularity incl. fix for crash on mesh uploads, an NVIDIA-specific optimisation to vertex buffers handling, fix for issues with animations using the Avatar Center joint, additional “minor” fixes and optimisations; OpenSim updates, incl: InWorldz crash fix when using Edit > contents > New Script, Kitely login URI updated, fix for rezzed objects edited scripts not being saved; backport of LL’s Quicktime media plugin improvement; assorted fixes and optimisations
Singularity updated on Tuesday January 28th to version 1.8.5.5617 – core updates: Fitted Mesh support; HTTP updates; new “mouse move” capability; significant updates and improvements to graphics and rendering; underwater shadows; Mouselook and camera placement improvements; numerous fixes and enhancements (release notes)
Unusually for me, I missed celebrating Chinese New Year this year. I didn’t even make it to the Creations for Parkinson’s Dance in-world, so no chance to say goodbye to the snake and greet the horse 😦 .
To make up for things, I decided to hop over to Yamatai on the region of Okami. My friend Miro Collas poked me in that direction a while ago, but I held-off blogging at the time as I’d been a little oriental-focused, and the region was still under construction. The latter still appears to be the case, but such is my mood and the beauty of the build, I decided to blog on it anyway.
The region is rated Adult, but don’t worry about any overt signs of naughtiness – at least not yet. Truth be told, I’ve no idea what the eventual intention for the region is; but whether it is period, role-play, combat, naughty fun or a combination thereof, it really is eye-catching in design.
I’m not sure if Yamatai is an intentional reference to Yamatai-koku, the Sino-Japanese name for an ancient country in Wa (Japan). First mentioned in the Wei Zhi, circa 297 AD, it has since been the subject of much debate as to its actual location down the generations.
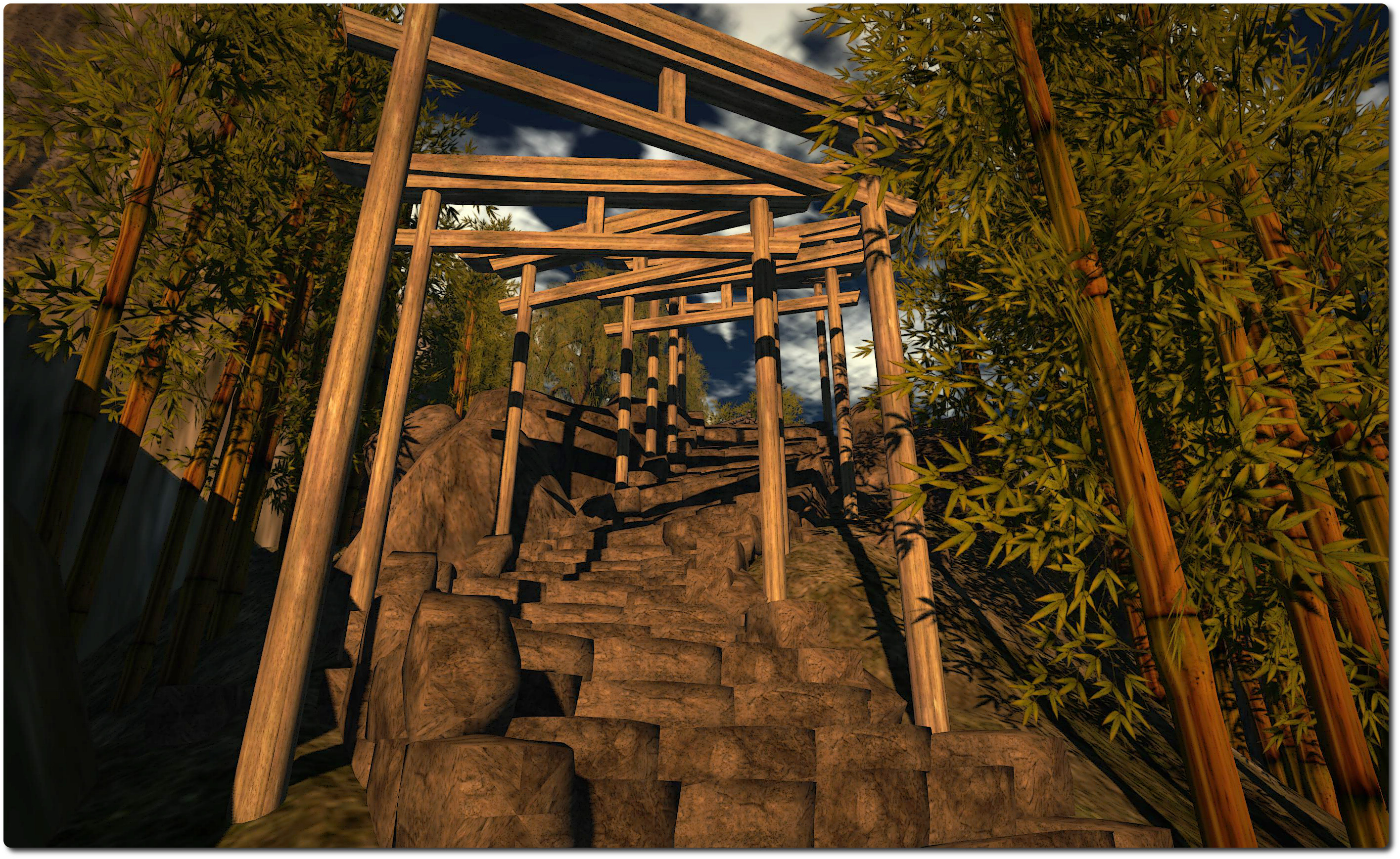
The Hou Han Shu (circa 432 AD) and the Sui Shu (636 AD) both report the mysterious Yamatai as being on a mountainous island or islands – and this certainly fits Yamatai in SL, which features dwellings and a tumbledown temple all built on a rugged landscape complete with wooded areas and tall growths of bamboo, surrounded by tall mountains through which a passage to the sea winds.
The landscape has been carefully sculpted, and the various buildings, both down on the waterfront and higher-up in the hills have been carefully situated to create an environment that is pleasing to the eye (and camera), and enticing in its invitation to be explored. There are a number of airborne houses hovering over the region, so you might want to derender them in order to avoid odd shadows showing-up in your pictures. Keep an eye out for the little touches of detail as well!
February 14th will mark One Billion Rising for Justice around the globe, once again calling for an end to violence against women. In Second Life, it will see a gathering across four regions to mark the event.
The most recent update on the SL event from the organisers reads in part:
In Second Life, we are working behind the scenes at the moment to get everything ready for One Billion Rising for Justice in Second Life.
The four regions that will make up our stage area have been arranged with Fruit Islands, and will be delivered next weekend. Then we’ll be getting to work on terraforming them while the stage is built (by Victor1st Mornington, who built the stage for us last year). The artists will move in shortly after to set up their installations and this year, in addition to individual installations, there will also be galleries for 2D and 3D work.
Activities planned for the event include live music and DJs, with streaming provided by Lusch Audio, poetry readings, and opportunities to meet, chat and share. There will be kiosks across all four regions with information on One Billion Rising and on organisations that are working for justice for women across the globe.
Volunteers Still Needed
The organisers are still seeking volunteers to help with the event. If you’d like to offer your services, please make sure you sign up! There will be workshops throughout the weekend of February 8th and 9th for those who do volunteer – so there’s no need to worry about being dropped in the deep end.
The Event
One Billion Rising for Justice is about raising awareness of global issues through an event that combines giving information with a day of art, music, poetry and dance. Donations are not taken directly by the organisers, who request that people who want to donate find out more at the information kiosks and then select which organisations they would like to donate too.
The progress of NASA’s Curiosity rover on Mars has slowed somewhat in January, the rover having covered around 265 metres (865 feet) in the month, bringing the total distance Curiosity has travelled since arriving on Mars in august 2012 to some 4.89 kilometres (3.04 miles).
Part of the reason for the slow-down has been due to the recent traverse of considerably rougher terrain during the rover’s trek towards its encounter with “Mount Sharp” having resulted in somewhat more wear-and-tear of the aluminium wheels than had perhaps been anticipated.
While not of a serious concern – the rover can function with quite substantial damage having being done to the wheels – the mission team has nevertheless been looking for ways and means for the rover’s progress to continue at a reasonable pace, but without exposing the wheels to excessively rugged terrain.
Most recently, this has involved examining a possible gateway to a smoother route down to the point at which they plan to commence explorations of “Mount Sharp’s” lower slopes. This gateway is a 1-metre (3-ft) high sand dune sitting between two rocky scarps. Dubbed “Dingo Gap”, the dune appears to provide access to a smoother route heading south-west and towards the rover’s ultimate destination.
Dingo Gap, imaged on Sol 526 (January 28th, 2014). Taken by the “left eye” of Curiosity’s Mastcam, this mosaic shows the metre high dune in the upper centre of the picture, sitting between two rocky scarps and about 35 metres (115 ft) from the rover. The far horizon of the image is the wall of Gale Crater (click to enlarge)
“The decision hasn’t been made yet, but it is prudent to go check,” said Jim Erickson, NASA’s project manager for Curiosity. on January 28th. “We’ll take a peek over the dune into the valley immediately to the west to see whether the terrain looks as good as the analysis of orbital images implies.” The orbital images he referred to came from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter, while the “closer look” actually took place on January 30th.
In addition to using alternative routes, the drive team has also been evaluating possible driving techniques that might help reduce the rate of wheel punctures, such as driving backwards or using four-wheel drive instead of six-wheel drive. This may help is situations where some of the wheel damage may have resulted from the force of the rear wheels pushing the middle or front wheels against sharp rocks, rather than simply the weight of the rover driving over the rocks.
As a result of the slow-down, JPL are considering introducing some evening and weekend drives into the February drive schedule.
A mosaic showing Dingo Gap (foreground) and the terrain beyond, as imaged by Curiosity’s monochrome Navcams on Sol 528 (January 30th, 2014) – click to enlarge
More Drilling
As well as providing a route southwards, Dingo Gap may also allow the rover easier access to its next waypoint on the journey, where it is expected to carry out further drilling and sample-gathering activities. The site, identified as “KMS-9” is around 800 metres (half-a-mile) from Curiosity’s current position when measured in a straight line – but that is over rugged terrain the mission team would potentially avoid if possible.
The drilling site has been imaged from orbit, and holds significant appeal to the mission team, as Katie Stack, a science team collaborator explained. “At KMS-9, we see three terrain types exposed and a relatively dust-free surface. This area is appealing because we can see terrain units unlike any that Curiosity has visited so far. One unit has striations all oriented in a similar direction. Another is smooth, without striations. We don’t know yet what they are. The big draw is exploration and seeing new things.”
“KMS-9” won’t be the first rocky area examined by Curiosity in 2014. On January 15th, the rover examined a rock dubbed “Harrison”, which revealed linear crystals with feldspar-rich composition.
Earth-side Tests
At the same time as the efforts to select a candidate route have been underway, other members of the team have been carrying out further tests to validate capabilities for the rover to drill for rock samples on the kind of slopes it will likely encounter when exploring and climbing “Mount Sharp”.
In particular, the tests have been focused on the drill mechanism’s ability to withstand damage as a result of slippage when the rover is parked on a sloping surface. So far, results have shown that the drill mechanism can withstand slippage of around 5 centimetres (2 inches) in the rover’s position without any real damage occurring. Such slippage could be induced through a number of circumstances, including the angle of slope, cumulative damage to the wheels which may impact their ability to grip the surface beneath them, and material on the surface which may also impact the rover’s ability to sustain a solid grip on underlying rock.