See also: My updated May 2013 review.
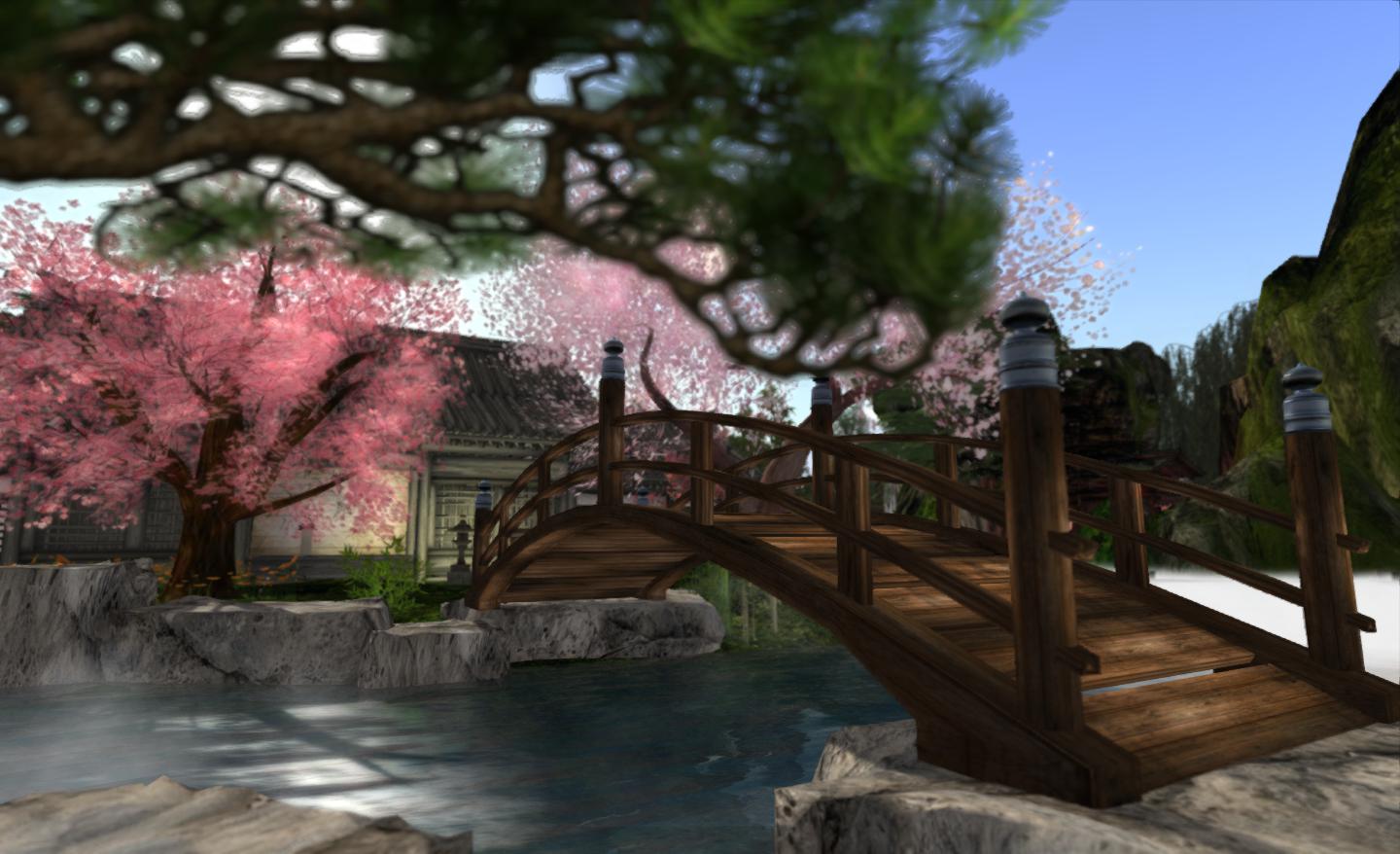
I was unaware of Keisei until Honour McMillan recently posted images in her blog. Once I’d seen them, however, it went right to the top of my list of SL destinations to visit. Anything having an oriental theme is going to get my attention, and Keisei is just that.
The region, rated as Moderate. is predominantly Japanese in nature, although there are small Sino touches which I find attractive as well. From the landing point, you’re free to wander where you will, with footpaths to guide you, or you can use the teleport board to pin-point selected destinations.
 Keisei (Flickr)
Keisei (Flickr)
There is a lot to see and enjoy here, and the landscape has been put together to encourage photography – and to encourage experimentation with Windlight settings; so much so, that I could have happily spent hours in Keisei snapping away and tweaking my settings through Phototools (which I think I’m finally starting to get my head around, although I have a long way to go yet before I can pull off anything half-decent).
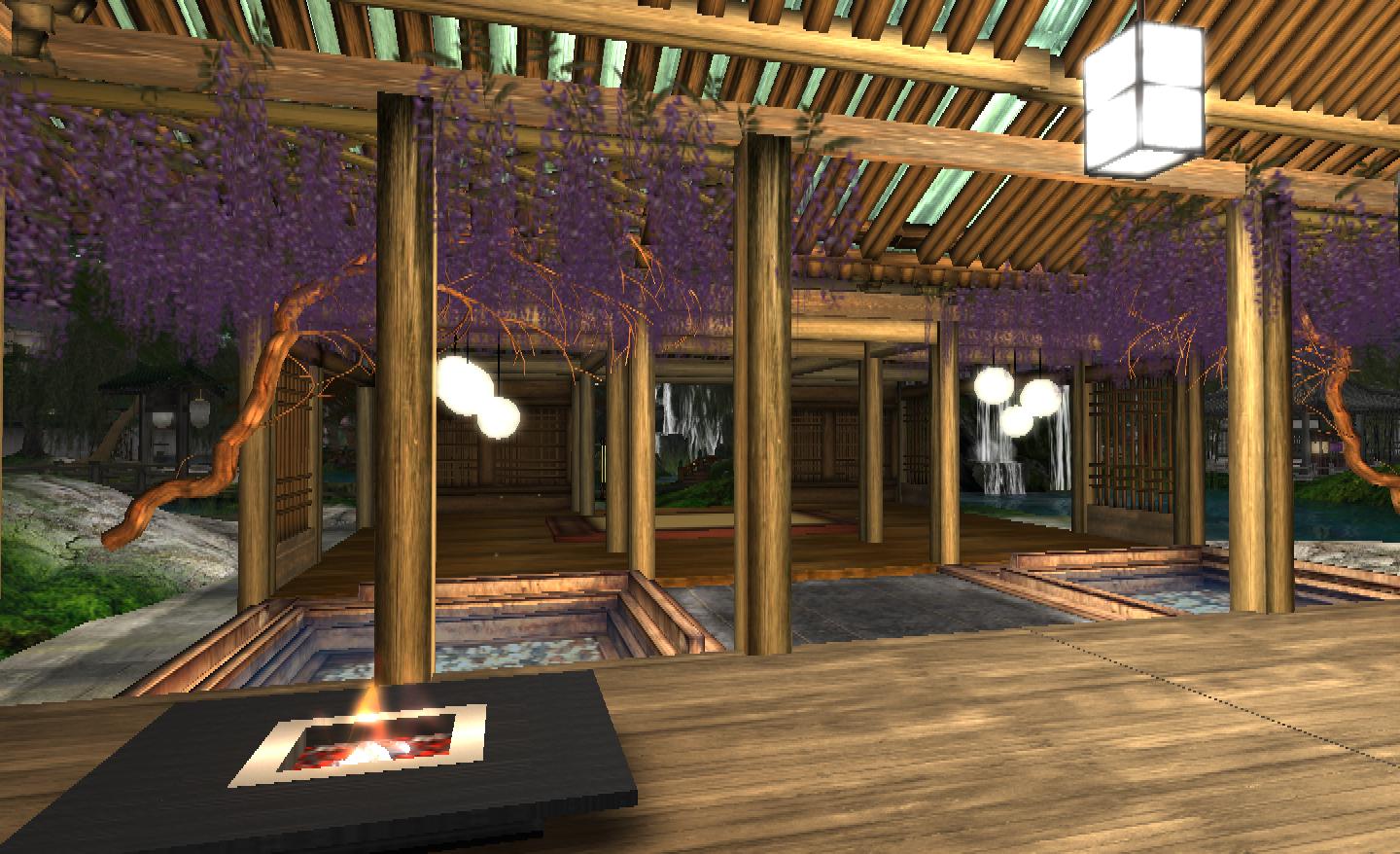
Water is very much a feature here, with streams, pools and waterfalls in abundance. There are places to sit and admire the gardens, places to climb, and places to sit in quiet contemplation. Keisei is also the home of Shiraito-no-Taki Hanamachi, located to the North-west of the region.
 Keisei (Flickr)
Keisei (Flickr)
To the North-east side of the region sits Enkatsu Yama, the private home and garden of Famke Faith (also known as Phoenix DaVinci). The outer ward of this is open to the public, and visitors are welcome to stroll around and enjoy the tranquillity. Beyond the inner gates, guarded by two Chinese looking lions, sits the house proper in a private ward, where visitors are asked not to stray.
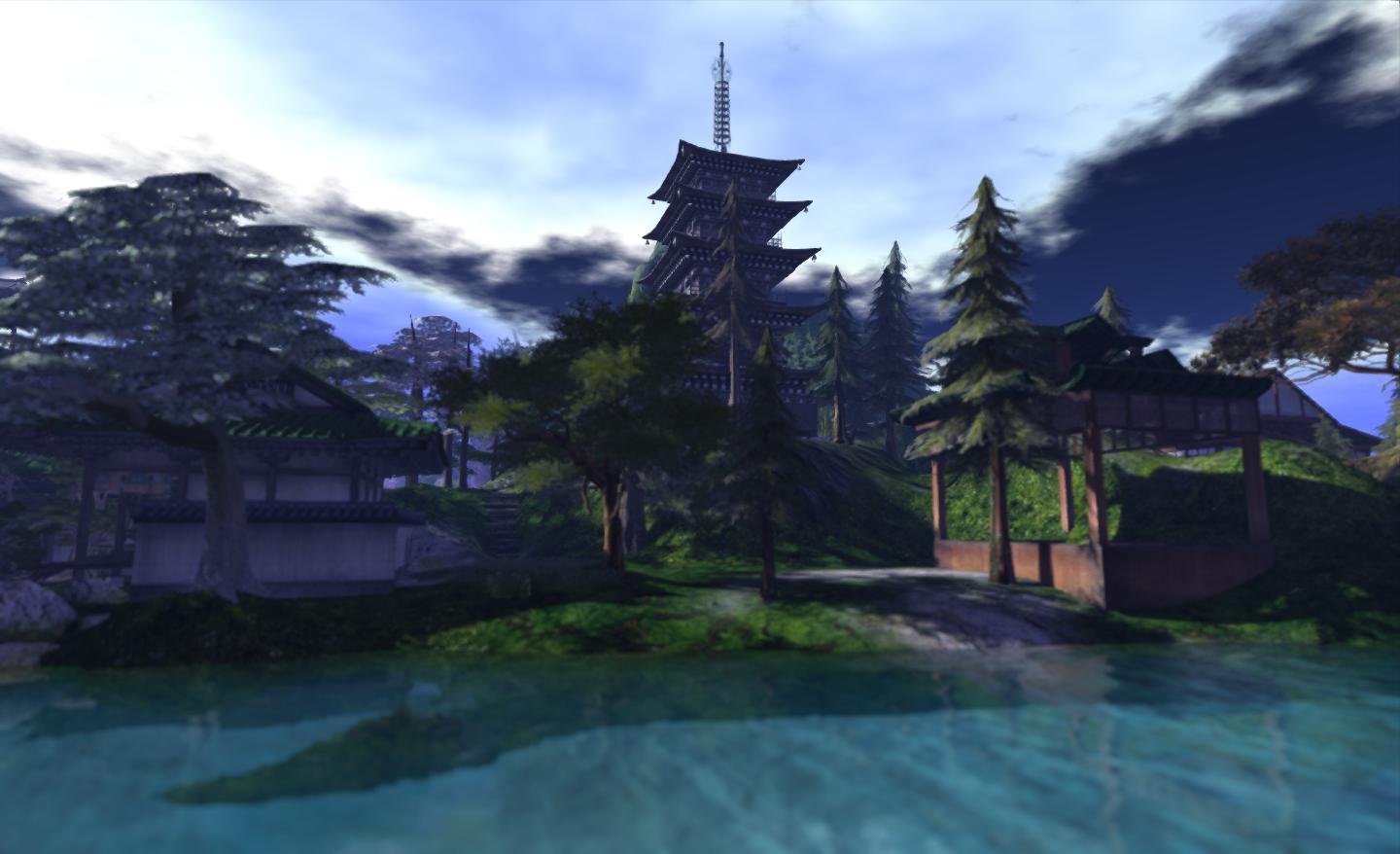
Sim extenders are used to great effect around Keisei, giving the feeling that this is a small, coastal community, lost in time and free from the hustle and bustle of modern life. Out in the bay to the west of the region lies a wood-framed light house, waiting to guide ships to a safe berth.
 Keisei (Flickr)
Keisei (Flickr)
There are a number of Windlight presets in operation around the sim, so you’ll likely get requests to change your Windlight as you go – it’s worth doing, as some of the presets really do set off the sim’s landscaping and architecture perfectly. The music streams also vary from parcel to parcel – so if you use a viewer with an active media filter, be prepared for a few prompts from this as well. The music I heard was again in keeping with the tranquil nature of the sim, and didn’t detract in any way from my enjoyment as I explored.
This is a wonderfully relaxing sim to visit and, as mentioned, a photographers delight. My thanks to Honour for raising my awareness as to its existence.
 Keisei (Flickr)
Keisei (Flickr)
Related Links
- Keisei (Rated Moderate)
- SL Destination Reviews in this Blog





