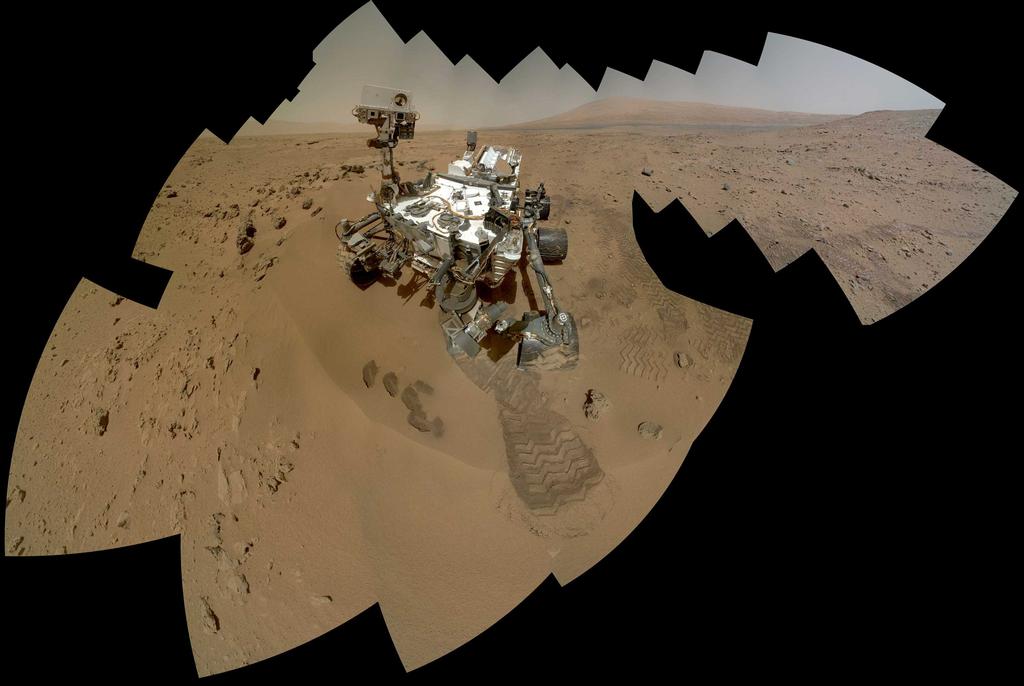
Tuesday January 15th 2012 marked Sol 158 on Mars for Curiosity, and the first NASA / JPL telecon for 2013. As per my last report, the Mars Science Laboratory rover remains in “Yellowknife Bay”, which has revealed itself as a geological treasure trove. The net result of this is that Curiosity will be remaining in the area for a while to come, and that the first drilling operation which had been anticipated for this week has now been pushed back for perhaps two weeks while scientists use the time to carry out more extensive observations and examination of the wide variety of rock types in the region.
Tuesday January 15th 2012 marked Sol 158 on Mars for Curiosity, and the first NASA / JPL telecon for 2013. As per my last report, the Mars Science Laboratory rover remains in “Yellowknife Bay”, which has revealed itself as a geological treasure trove. The net result of this is that Curiosity will be remaining in the area for a while to come, and that the first drilling operation which had been anticipated for this week has now been pushed back for perhaps two weeks while scientists use the time to carry out more extensive observations and examination of the wide variety of rock types in the region.
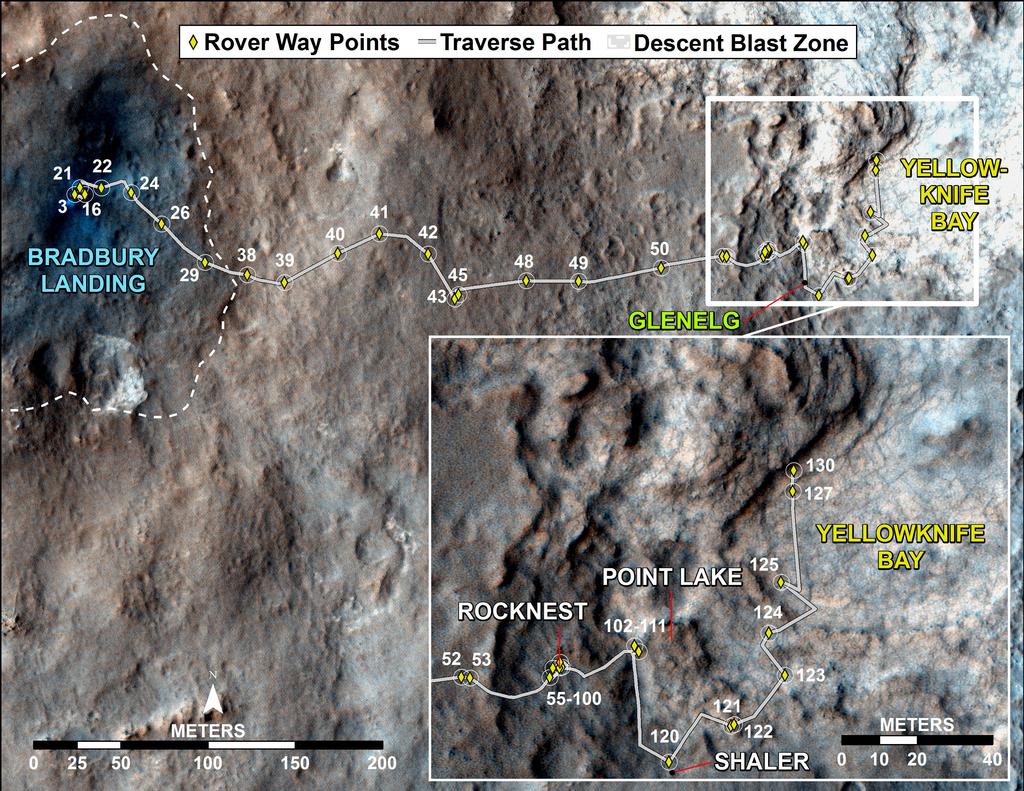
Referring the region, mission Principal Investigator John Grotzinger describes it as a “jackpot environment” for scientific exploration. A depressional area, “Yellowknife Bay” had already been identified as a possible location where free-flowing water many have been present. However, examination over the course of the last couple of weeks reveals that the entire area has been subject to very heavy aqueous activity, including the formation of rich mineral deposits.
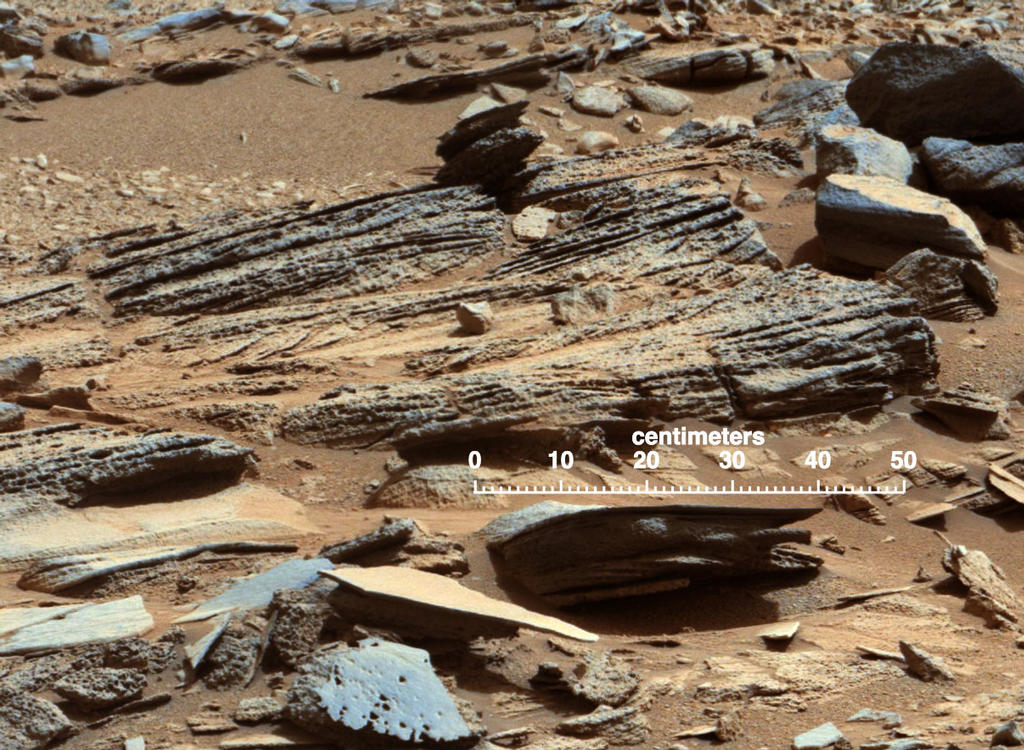
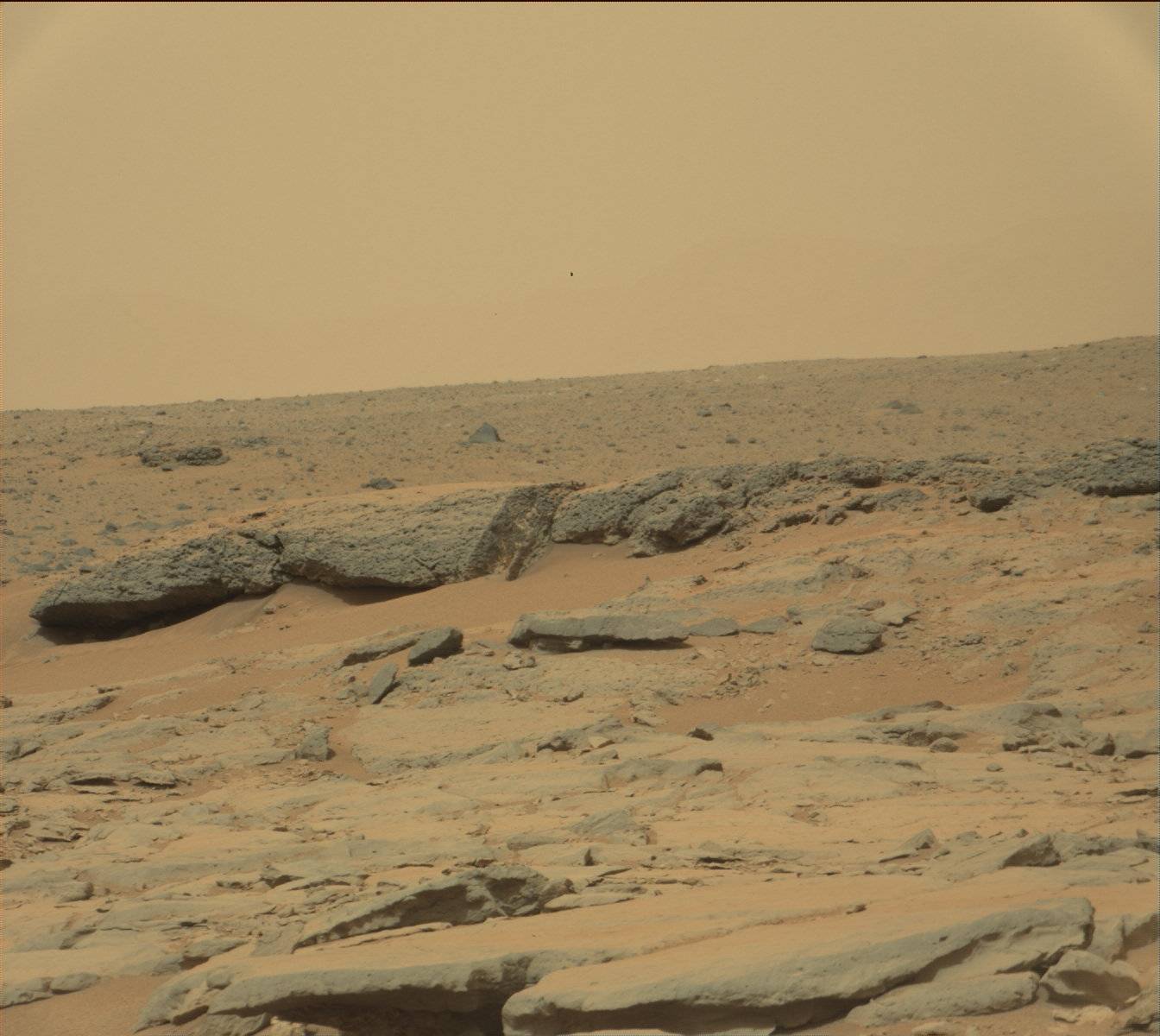
While orbital surveys ahead of the mission showed the area to be a likely location for finding evidence of water action – it is very much an alluvial plain, after all – the MSL team have nevertheless been surprised at the diversity of rock formations found, and the very strong evidence of what is called “mineral precipitation” – a process whereby minerals which formed elsewhere being carried to the region by strong water currents (estimated to be perhaps as high as a metre per second), before the current slows to a point where the minerals can no longer be held in suspension and so “precipitate out” as deposits on and in the rocks.
The ChemCam laser has been employed in the study of some of the mineral deposits within the rocks, revealing they contain Hydrated Calcium Sulfates. On Earth, calcium sulfates like gypsum form frequently in veins when relatively dilute fluid circulates at low to moderate temperatures – in other words, water must have once been circulating through the veins in the rocks in order for these minerals, thought to be gypsum or bassanite, to form.
Please use the page numbers below to continue reading this article


 As generally happens in long-duration space missions, media attention around Curiosity is waning somewhat as the initial gee-whiz factor wears off and the reality of this potentially being a multi-year mission kicks-in and journos start seeking the next gee-whiz headline. As such, the next time Curiosity really hits the headlines, it’ll likely be for one of three reasons: Something Big has happened science-wise; someone has sensationalised upcoming news a-la Joe Palca; or something on the rover has broken. Indeed, a combination of the second two points is already occurring.
As generally happens in long-duration space missions, media attention around Curiosity is waning somewhat as the initial gee-whiz factor wears off and the reality of this potentially being a multi-year mission kicks-in and journos start seeking the next gee-whiz headline. As such, the next time Curiosity really hits the headlines, it’ll likely be for one of three reasons: Something Big has happened science-wise; someone has sensationalised upcoming news a-la Joe Palca; or something on the rover has broken. Indeed, a combination of the second two points is already occurring.