In April 2019 during a High Fidelity General Assembly meeting, Philip Rosedale announced the company would no longer be sitting within the content creation / public space provisioning area, and would instead switch to focus on software / platform development. He followed-up on that announcement a few days later with a blog post outlining the company’s move to try to develop a virtual workstation / environment that would allow people to work collaboratively whilst geographically separate.
Since that time, the company has been working on the virtual workspace idea, apparently developing it to a point where a desktop versions has been undergoing widespread testing involving teams from some 75 organisations.
However, in a December 11th blog post, Updates and a New Beginning, Rosedale announced that while the company plans to continue use the technology they’ve developed, and hopefully carry it forward into the future, they do not plan to commercialise it at present, and are again pivoting to a new project.
Simply put, having taken a close look, while we can see that remote work is going to continue on its growth trajectory and we do have customers using it—the opportunity is not big enough today to warrant additional development.
The work we’ve done over the past six months has been valuable in helping us understand how to make a 3D VR environment usable, stable, and accessible to first-time, non-gaming audiences, and that is intellectual property we will take forward into future work.
The pivot means that the company is shedding a further 50% of its staff (approx 40 people, given 20 people, or 25% of staff were let go in May 2019). Further, and as from January 15th, 2020, High Fidelity will be shuttering public access to its code repositories on Github (although users are welcome to fork them, if they wish), and will also be withdrawing all their apps from the Steam and Oculus stores and from the Apple App Store and Google Play.
For now, Rosedale is not revealing what the new project is, but given the shuttering of the current platform code repositories and a comment in the December 11th blog post, it might be related to a more virtual world style of platform / application.
Giving up on the current generation of HMDs doesn’t mean we’re giving up on Virtual Worlds. A team is already working on a new internal project, and although we aren’t going to talk about it now, we will have more to share about what we are doing when we are ready.
A FAQ has been produced to accompany the blog post, answering core questions existing user might have about platform accessibility, account registrations, blockchain use, buying / selling HFCs, etc. And those who have a High Fidelity account should refer to that document.
The announcement comes on the heels of a blog post from Rosedale published on December 9th, 2019, in which he continues to ruminate on the hard realities surrounding the state of VR at this point in time.
In Requiem for the HMD, he admits something that many of us have always felt: the the current generation of HMDs can at best only enjoy a modest success, and the technology as a whole still has a long way to go before it is liable to reach a “mainstream” place in the consumer market. In particular, he notes four things he believes the technology requires in order to reach this point: comfort of wearing, the inclusion of see-through displays and at desktop screen resolutions, and the ability of people to be able to type tat normal speeds in VR. To these I’d actually add more fundamental requirements such as cost per unit, overall ergonomics and compelling use cases – but these are topics for another blog post.
In the meantime, Updates and a New Beginning makes for interesting reading, as it offers a further honest evaluation of VR as it is today from someone who has been one of its strongest evangelists. For those who are having to depart High Fidelity as a result of the company’s further shift in direction, the hope is that they are able to transition smoothly into other work opportunities.
For those users who would like to keep the spirit of High Fidelity’s VR platform alive, as noted, they have until January 15th, 2020 to fork the code into their own repositories. There also the likes of Tivoli Cloud in development by former High Fidelity alumni Caitlyn Meeks and Maki Deprez that may blossom into new homes for HiFi users.
A time-lapse video of the SpaceX CRS-19 cargo Dragon being captured by the Canadarm-2 of the International Space Station (ISS)
The past week has seen two resupply missions launched to the International Space Station (ISS), which between them will deliver 4.6 tonnes of supplies and equipment to the station, including some special visitors.
The first mission, CRS-19, featuring a SpaceX Dragon and Falcon 9 launch vehicle, lifted-off from Cape Canaveral Air Force Station (adjacent to the Kennedy Space Centre) on Thursday, December 5th, after being delayed 25 hours due to high winds over the launch site. It rendezvoused with the ISS at 10:05 GMT on Sunday, December 8th. The second mission features a Russian Progress resupply vehicle, which lifted off from the Baikonur Cosmodrome in Kazakhstan at 09:34 GMT on Friday, December 6th, and is due to dock at the ISS on Monday, December 9th, carrying a mix of food, fuel and supplies.
However, it is the Dragon vehicle that has captured most attention, due to its cargo. As well as carrying the traditional Christmas goodies for the ISS crew, CRS-19 carried 40 passengers in the form of mice and elements of the station’s increasing use of robots.
The mice will spend a month aboard the ISS as a part of research into two of the most debilitating effects of spending extended periods in micro-gravity environments such as orbiting the Earth or something like a 6-month flight to Mars: muscle and bone mass loss.
Several of the mice have been dubbed “mighty mice” on account of their being genetically engineered by scientists at the Jackson Laboratory for Genomic Medicine (JAX-GM) in Maine, USA. Specifically, they have been engineered to inhibit myostatin, a molecule that occurs in mammals that regulates muscle growth (discovered in 1997 by Dr. Se-Jin Lee), allowing them to develop increased muscle mass compared to ordinary mice.
One of the myostatin-inhibited “mighty mice” (l) and a non-inhibited companion. Credit: JAX-GM
The idea is that by inhibiting the myostatin, the mice will be able to maintain both muscle mass and limit bone calcium loss whilst at the station, the lack of myostatin allowing them to continue to convert protein into muscle mass despite the mice being less active on the station than the would be on Earth.
They will spend their time on the ISS with a group of mice that have not had their myostatin blocked, and with two similar group sof enhanced / non-enhanced mice on Earth, to determine the overall impact of the lack of myostatin in the production / maintenance of muscle bone mass in micro-gravity compared to how myostatin might contribute to muscle / bone mass loss when allowed to function normally.
As well as helping determine what medical / genetic assistance can be given to humans on long duration, low-gravity space missions (possibly alleviating the need for up to 4 hours a day to be spent in exercise to counter muscle / bone mass loss), it is hoped that controlling / inhibiting myostatin’s function could be used to help treat patients recovering from hip fracture surgery, or those in intensive care where muscle growth could be a major factor in their recovery, and to assist elderly people suffering from muscle loss or osteoporosis.
CIMON Returns to the ISS
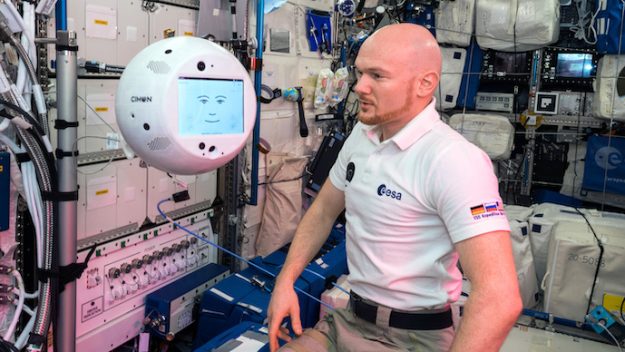
In addition to the mighty mice, the CRS-19 mission also delivered CIMON-2 (“Simon-2”), an updated versions of a robot assistant for ISS crews. Developed by Germany’s DLR CIMON (Crew Interactive Mobile CompaniON) is a medicine-sized robot that can float around the ISS using 14 small fans boasting a combination of IBM Watson AI, cloud connectivity, and neural network training. It was first flown aboard the ISS in 2017 / 2018, and is capable of assisting with routine tasks and research projects, displaying instructions on its forward screen, and recording images. It can also recognise, learn from, and bond with crew members through natural language; offer creative solutions to tricky challenges; and even serve as a security guard, noticing potential problems before they become dangerous.
CIMON-2 operates alongside ESA astronaut Alexander Gerst during its first outing to the ISS in November 2018. Credit: NASA / ESA / DLR
Unfortunately, the first outing for CIMON didn’t entirely go according to plan, in an outing with ESA astronaut Alexander Gerst, things started out well enough, with CIMON helping Gerst complete some test tasks, but problems arose when Gerst asked it to play his favourite music. Selecting Man Machine by Kraftwerk, CIMON continued to play the music while accepting other tasks, and when Gerst ordered, “Cancel music” the robot to replied, “I love music you can dance to! Alright, favourite hits incoming.”
While CIMON could still comprehend other commands, it appeared to become confused and not a little stroppy as Gerst communicated with those monitoring the test. “Be nice, please,” it requested at one point, followed a little later by, “Don’t you like it here with me?” and “Don’t be so mean.”
The improved CIMON-2 comes with more sensitive microphones that will hopefully allow it to hear better and not confuse commands, and a more robust AI system to allow it to better understand when it is being addressed and when an astronaut might be talking to someone else. This improved AI system includes IBM Watson Tone Analyser technology, which uses linguistic analysis to detect emotion in the tone of a conversation and respond to it – which given CIMON’s own moodiness noted above, could be interesting!
CIMON-2 is expected to spend up to three years aboard the ISS. As well as serving as a test bed for easing the stress of living and working in limited environments like the ISS and in developing greater understanding of how robots and AI can function to support crews on long duration missions, CIMON-2 is also potentially a stepping stone for developing the necessary trust human crews require to make the routine use of such systems – which can record, process and store human activities, interactions and moods, raising concerns of privacy and data security – acceptable to crew.
Dextre, RELL and and the “Robot Hotel”
Dextre (highlighted) mounted on one of its Orbit Repair Unit (ORU) “workstations”. The Canadarm-2 robot arm hovers to the right. Credit: NASA
Robots are an important part of future human space activities, and over the years, a number of systems have been employed or tested aboard the ISS, for working both inside and outside the station. The most obvious of these is the Canadarm-2 remote manipulator system used outside of the ISS, while inside the ISS there have been robot system like CIMON and FYODOR (see: Space Sunday: Lunar landers, and robots in space).
A new ESA budget confirms the space agency’s commitment to the Space RIDER uncrewed space plane Credit: ESA
On Thursday, November 28th, 2019, European Space Agency (ESA) members agreed to a record €14.4 billion, promising to maintain Europe’s place at the top table alongside NASA and China. The four largest contributors to the budget are Germany (€3.3 billion); France (€2.7 billion), Italy (€2.3 billion) and the United Kingdom (€1.7 billion – ESA is not an EU organisation, so the UK’s involvement will remain unchanged when / if Brexit occurs, although EU funding of UK science and technology projects will be impacted).
The funding will allow ESA to move forward on a number of fronts in space exploration and technology development, including:
The Laser Interferometer Space Antenna (LISA) – the first space-based gravitational wave observatory, comprising three spacecraft placed in a triangular formation 2.5 million km apart and following the Earth in its orbit around the Sun. LISA will launch in the early 2030s.
Transitioning ESA to the next generation of launchers: Ariane 6 and Vega-C.
Continued support of the International Space Station, including continued participation in crew missions.
Direct involvement in NASA’s Artemis lunar programme, including technology for the Lunar Orbital Platform-Gateway (LOP-G) and crewed missions.
A joint Mars sample-return mission with NASA.
Development of flexible satellite systems integrated with 5G networks, as well as next-generation optical technology for a fibre-like ‘network in the sky.’
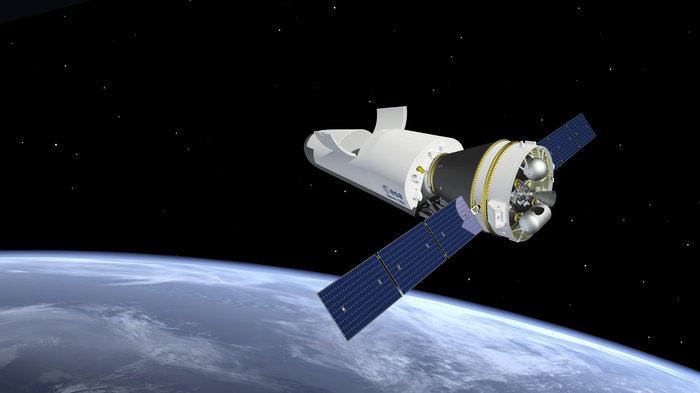
The development of a European reusable space vehicle: Space RIDER.
Space RIDER (Reusable Integrated Demonstrator for Europe Return) is a project I first wrote about in 2015, when ESA flew the European Intermediate eXperimental Vehicle (IXV). An uncrewed vehicle weighing just under 2 tonnes, it had the primary objective to research the re-entry and flight characteristics of a lifting body type of vehicle and test the re-entry shielding technologies for such a vehicle.
The Space RIDER vehicle shown in cutaway, showing the open payload bay, forward parasail deployment system and after avionics. Credit: ESA
IXV paved the way for the initial development for Space RIDER, which will be an uncrewed cargo vehicle designed to be launched by the Vega rocket and capable of carrying up to 800 Kg of payload into orbit. All Space RIDER vehicles will be able to carry out around 5 flights apiece, reducing the overall cost of placing payloads into orbit. Following re-entry into the Earth’s atmosphere, the vehicle will descend to Earth under a parasail, allowing it to glide to a nominated landing zone.
As well as being suitable for launching space payloads into orbit, Space RIDER will itself be a technology development vehicle for possible larger reusable vehicles using similar lifting body technology.
Space RIDER will largely be developed by Italy and the first flight is due to take place in 2022.
Happy Anniversary, InSight
On Monday, November 26th, 2018, NASA’s InSight (Interior Exploration using Seismic Investigations, Geodesy and Heat Transport) lander, built with international cooperation, arrived on the surface of Mars. The focus of the mission is to probe the Red Planet’s interior – its crust, mantle and core in order to answer key questions about the early formation of the rocky planets in our inner solar system – Mercury, Venus, Earth, and Mars – more than 4 billion years ago.
A simulation of InSight touching down on Mars using its 16 rocket motors. Credit: NASA
Since that landing, the year has been an eventful one for InSight, the lander’s super-sensitive seismometer suite has detected more than 150 vibration events to date, about two dozen of which are confirmed marsquakes. However, and I’ve I’ve reported a number of times in these pages, InSight’s other primary science instrument, a burrowing heat probe called the Heat Flow and Physical Properties Package (HP³), has had tougher time.
The self-propelled “mole” probe designed to burrow down into the Martian sub-surface having been stuck for most of the year after only penetrating a few centimetres into the ground. Those operations only resumed in October 2019, and were short-lived after the probe inexplicably “bounced” its way almost completely out of the hole it had burrowed, leaving scientists and engineers still trying to work out what happened.
Side-by-side: (l) the first image returned by InSight using the lander-mounted, Instrument Context Camera (ICC), still with its dust cap in place. Note the lander’s leg in the lower right corner. (r) a photo captured by the robot-arm mounted Instrument Deployment Camera (IDC) as the arm is exercised on November 30th, 2018
The solar-powered InSight is scheduled to operate for at least two Earth years.
An artist’s impression of what the 2012 water plume might have looked like if seen from the vicinity of Europa. Credit: NASA / ESA / M. Kornmesser.
What has long been suspected has likely now confirmed: water is present under the ice of Jupiter’s moon Europa.
As I’ve noted on numerous occasions in this space Sunday articles, it’s long been thought that an ocean of water exists under the cracked icy crust of Europa, potentially kept liquid by tidal forces created by the moon being constantly “flexed” by the competing gravities of Jupiter and the other large Moons pulling on it, thus generating large amounts of heat deep within its core – heat sufficient to keep an ocean possibly tens of kilometres deep in a liquid state.
Europa’s internal structure, showing the subsurface ocean that could be up to 100 km deep
Circumstantial evidence for this water has already been found:
During its time studying the Jovian system between 1995 and 2003, NASA’s Galileo probe detected perturbations in Jupiter’s magnetic field near Europa – perturbations scientists attributed to a salty ocean under the moon’s frozen surface, since a salty ocean can conduct electricity.
In 2012 the Hubble Space Telescope (HST) captured an image of Europa showing what appeared to be a plume of water vapour rising from one of the many cracks in Europa’s surface – crack themselves pointed to as evidence of the tidal flexing mentioned above. The plume rose some 200 km from the moon.
In 2014, HST captured images of a similar plume rising some 160 km above Europa.
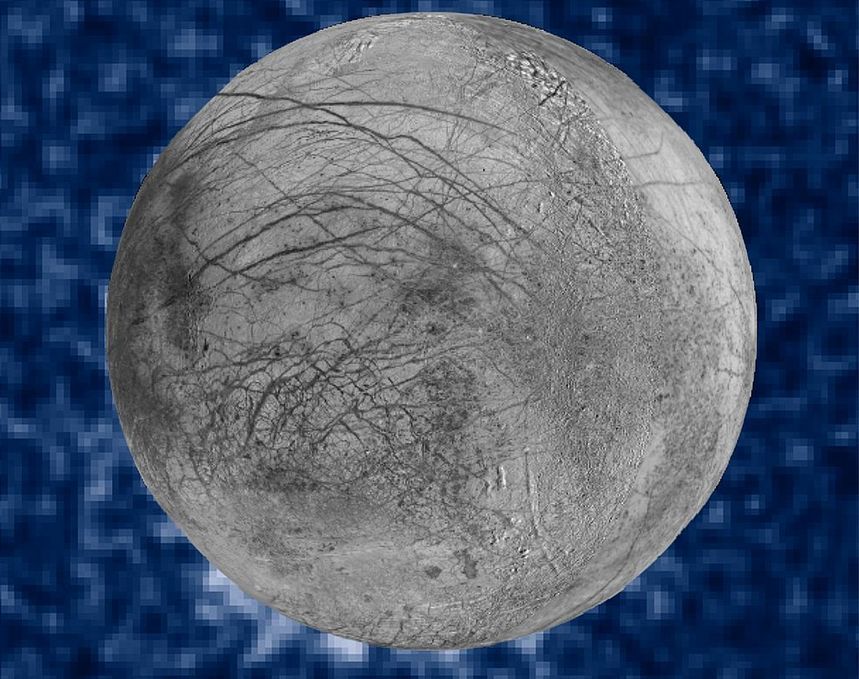
A composite image showing suspected plumes of water vapour erupting from Europa at the 7 o’clock position, as imaged by the Imaging Spectrograph on the Hubble Space Telescope in 2014. They rose 160 km, and are believed to have come from the sub-surface ocean. Note that the image of Europa is superimposed on the original, and comprises a mosaic of images taken by the Galileo and Voyager missions. Credit: NASA, ESA, W. Sparks (STScI), and the USGS Astrogeology Science Centre
Now a new paper, A measurement of water vapour amid a largely quiescent environment on Europa, published on November 18th, 2019 in Nature, offers the first direct evidence that water is indeed present on Europa. Specifically, the team behind the study, led by US planetary scientist Lucas Paganini, claims to have confirmed the existence of water vapour on the surface of the moon.
Essential chemical elements (carbon, hydrogen, oxygen, nitrogen, phosphorus, and sulphur) and sources of energy, two of three requirements for life, are found all over the solar system. But the third — liquid water — is somewhat hard to find beyond Earth. While scientists have not yet detected liquid water directly, we’ve found the next best thing: water in vapour form.
– Lucas Paganini
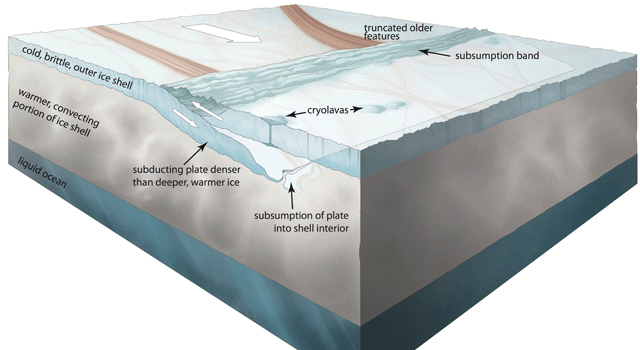
Evidence of plate tectonics have been found on Europa, again pointing to the influence of tidal flexing. This conceptual illustration shows the subduction process where a cold, brittle, outer portion of Europa’s 20-30 km thick ice shell moved into the warmer shell interior and was ultimately subsumed. This resulted in a low-relief subsumption band at the surface in the overriding plate, alongside which cryolavas containing water vapour may have erupted. Credit: Noah Kroese, I.NK
Using the W.M. Keck Observatory in Hawaii, Paganini and his team studied Europa over a total of 17 nights between 2016 and 2017. Using the telescope’s spectrograph, they looked for the specific frequencies of infra-red light given off by water when it interacts with solar radiation. When observing Europa’s leading hemisphere as it orbits Jupiter, the team found those signals, estimating that they’d discovered sufficient water vapour to fill an Olympic-size swimming pool in a matter of minutes. However, the discovery has been somewhat tempered by the fact water may only be released relatively infrequently.
Such infrequent releases help explain why it has taken so long to confirm the existence above Europa, but there are other reasons as well. The components that comprise water have long been known to exist on the moon whether or not they indicate the presence of water. Thus, detecting these components within a plume doesn’t necessarily equate to the discovery of water vapour – not unless they are in the right combinations. There’s a further pair of complications in that none of our orbital capabilities are specifically designed to seek signs of water within the atmospheres of the other planets or expelled from icy moons. So Earth-based instruments – like the Keck telescope spectrographs – must be used, and these deal with the naturally occurring water vapour in our own atmosphere.
Within Paganini’s team there is confidence that their findings are correct, as they diligently perform a number of checks and tests to remove possible contamination of their data by Earth-based water vapour. Even so, they are the first to acknowledge that close-up, direct studies of Europa are required – particularly to ascertain if any water under the surface of Europa does form a globe-spanning ocean, or if it is confined to reservoirs or fully liquid water trapped within an icy, slushly mantle. It is hoped that NASA’s Europa Clipper and Europe’s JUICE mission (both of which I’ve “previewed” in Space Sunday: to explore Europa, August 2019) will help address questions like this.
Hello! We’re building a spatialised metaverse from a volcanic island!
So reads the title of an introductory blog post for an upcoming new VR social environment called Tivoli Cloud VR that reader and friend Thoys Pan nudged me about (I had actually seen and post in passing over the weekend, but Thoy’s nudge prompted me to take a closer look).
Of course, it can seem as if “VR virtual worlds” are popping up all over the place, whether then aim to be spaces as Second Life users might recognise them, or “VR social environments” or hybrid attempts to lean towards the idea of a “metaverse” centred around gaming engines.
However, what makes Tivoli Cloud VR potentially interesting is that it is (at least in part) leveraging High Fidelity’s open-source architecture. The company has also been founded by Caitlyn Meeks, the former Community Manager / chief evangelist at High Fidelity, and Maki Deprez, a former freelance developer at High Fidelity.
That change in direction saw the virtual world code for High Fidelity being fully open-sourced for others to take up and run with. It also saw a series of lay-offs in the company, Caitlyn and Maki being two of them.
Nevertheless, both maintained a firm belief in the potential of the platform, so they put their heads together to try to figure out how they might continue with the vision embedded at the heart of High Fidelity: that of building a globe-spanning, fully spatialised virtual world.
We’re building a spatialized metaverse on the architectural foundations first laid by the open-source virtual reality company, High Fidelity. We believe this architecture, and its future progeny, will become the foundation of the spatial networking metaverse we’ve all been waiting for.
In this and future blog posts, we’ll explain why we believe this is the way to go. We’ll talk about the features and functionality we’re adding and changing in our distribution. And we’ll discuss our philosophical differences on important matters like user experience, product design, community support, and commerce.
– Caitlyn Meeks, discussing the formation of Tivoli Cloud VR
This is something of an ambitious goal; High Fidelity raised around US $70 million in inward investment and was – as the blog post notes, headed-up by “known” individuals with a major technology track record, but it couldn’t bring things together; Linden Lab is similarly having issues finding the best placement for Sansar.
However, in reading the Tivoli Cloud VR post, it’s hard not to get the impression that – finances allowing – Caitlyn and Maki aren’t in a hurry to make a major impression on the marketplace. Rather, they are all too aware of the state of VR take-up (which they charmingly – and not inaccurately, perhaps – refer to as entering it’s “winter” now the initial over-expectation aspect of the hype-cycle has passed), and so are prepared to work towards VR’s Slope of Enlightenment “springtime” in stages. Thus, this initial blog post might be regarded as planting the public seeds in preparation for a hopeful springtime bloom.
There’s a rich amount of thinking evident in the post, including observations why game engines might not be best suited for metaverse building, and offers an insight into what made working at High Fidelity so engaging. It also explores some of the challenges those trying to build any form of “metaverse” face – as well as being brutally honest about the challenges Tivoli Cloud VR itself faces.
We’re not a big company by any means, we’re just a plucky little startup who wants a metaverse. We haven’t got money to make sexy videos, our shares are currently worth way less than penny stock, we’re not going to have a flashy “initial land offering” on a blockchain. In fact, we’re going to stay away from using the blockchain for now.
– Caitlyn Meeks, discussing the formation of Tivoli Cloud VR
All of which sounds somewhat daunting, but it’s clear Tivoli Cloud VR has more than just moxie and an idea to build on foundations laid by High Fidelity; they have a vision that means that have the support of a bank, and technology services:
We do have is more than enough server resources, donated to us by Amazon, Google and Digital Ocean via the WXR Accelerator and First Republic Bank. What we do have is a ground-breaking open-source metaverse engine, seven years in the making.
– Caitlyn Meeks, discussing the formation of Tivoli Cloud VR
This latter statement points to a potential difference in approach to forming a “metaverse” platform: High Fidelity sought to leverage servers running across multiple hardware environments from high-end servers down to users’ own computers and mobile devices. Tivoli, at least to start with, looks as if it will be focused more on using cloud technology (hence the “Cloud” in the company’s name as well).
It’s too early to focus on the platform itself in terms of pictures, etc., – although I understand that when available, the client will allow access for desktop users as well as VR users. However, providing the company can meet the challenges it has set for itself, it will be interesting to follow their development, and I certainly wish Caitlyn and Maki the best in their endeavours.
Oh, and the volcano reference? That’s related to the fact that Tivoli Cloud VR is headquartered both in San Francisco, California, and in Adeje, on the south-western part of the volcano island of Tenerife, the largest of the Canary Islands, and well within sight of Pico del Teide, the island’s volanic peak.
NASA’s official Apollo 50th anniversary logo. Credit: NASA
Fifty years ago, on Friday, November 14th, 1969, the second Apollo Saturn V intended to place humans on the Moon lifted off from Launch Complex 39A at Kennedy Space Centre. Aboard it were mission commander Charles “Pete” Conrad Jr, Command Module Pilot Richard F. Gordon Jr, and Lunar Module Pilot Alan L. Bean.
Coming four months after the launch of Apollo 11, the Apollo 12 mission was intended to extend lunar surface operations, albeit modestly. Armstrong and Aldrin spent a total of 21 hours and 37 minutes on the Moon and completed a single surface EVA, Conrad and Bean would spend 31 hours and 29 minutes on the lunar surface, performing two EVAs in the process. However, it became the mission that almost had to be aborted thanks to a pair of incidents that occurred in the first minute after lift-off.
The crew for the flight were of mixed experience: Conrad was making his third trip into space, having flown the Gemini 5 and Gemini 11 missions; Gordon was making his second flight, having partnered with Conrad during Gemini 11; Bean was on his first flight into space. Conrad had joined NASA as part of the second astronaut intake group that included Neil Armstrong, while Gordon and Bean were both part of the third intake alongside of Edwin Aldrin.
The Apollo 12 crew (l to r): Commander, Charles “Pete” Conrad Jr.; Command Module pilot, Richard F. Gordon Jr.; and Lunar Module pilot, Alan L. Bean. Credit: NASA
Conrad joined NASA from the US Navy, where he was regarded as an outstanding carrier-based fighter pilot and first-class test pilot and flight instructor. He was regarded as one of the best pilots in his group, and was among the first of his group to be assigned a Gemini mission, flying alongside Mercury veteran, Gordon Cooper, the second American to orbit the Earth. He was also one of the most diminutive of the astronauts, standing just 5ft 6.5 inches tall. However, he made up for his small stature by being at times outspoken and a little irreverent (he facetiously referred to the Gemini 5 capsule as a “flying garbage can” during the then record-setting mission of almost 8 days in orbit, on account of the cramped size of the vehicle). While these qualities rankled some in NASA’s management, his forthrightness allowed him to become central to testing many spacecraft systems essential to the Apollo programme. These tests included the Gemini 11 mission with Gordon, and which remains the highest ever Earth orbital mission completed to date, with an apogee of 1,369 km (851 mi).
Conrad has a further distinction: under NASA’s original plans, he was selected to command the back-up crew for Apollo 8, the first test flight of the Lunar Module in Earth orbit. Under the standing protocol of back-up crews moving to a “prime” mission slot three missions later, he was in line to command Apollo 11. However, delays in getting the Lunar Module ready for flight meant that Apollo 8 and Apollo 9 were swapped, shunting his command slot to Apollo 12.
Both Gordon and Bean also came to NASA from the US Navy, where they had also served as fighter pilots before transitioning to test pilots. Both also served with Conrad during their military careers: Gordon with Conrad aboard the aircraft carrier USS Ranger, where the two shared a cabin and had become good friends, while Bean was trained by Conrad when becoming a test pilot, the two also forming a friendship in the process.
(l) The crew arrive at LC39-A ahead of the Apollo 12 launch. (r) Apollo 12 lifts-off, November 14th, 1969. Note the wet conditions apparent in both pictures. Credit: NASA
Apollo 12 launched from Cape Kennedy into a cloudy, rain-swept sky. 36.5 seconds into the flight, lightning struck the top of the vehicle and travelled through it and its ionised exhaust plume to strike the launch gantry it had just cleared. Protective circuits on the fuel cells in the service module (SM) took them off-line, along with much of the Command Module’s flight systems.
Having struck the Saturn V 36.5 second after the launch of Apollo 12, lightning travelled down through the vehicle and through its ionised exhaust plume to discharge on the launch pad gantry. Credit: NASA
15.5 seconds later lightning again struck, disabling the attitude indicator and garbling telemetry being received by Mission Control. However, neither strike affected the Saturn V rocket’s instrument unit, allowing the vehicle to continue to climb towards orbit as planned.
The loss of the fuel cells placed the CSM on battery power, but this wasn’t up to the task of providing all the power necessary to power the Command Module’s instruments for the entire mission. Nor could the fuel cells be brought back on-line.
Flight Director Gerry Griffin was considering calling for an orbital abort, despite fears the lightning strikes may have affected the Command Module’s parachute deployment pyrotechnics, when John Aaron, the Electrical, Environmental and Consumables Manager (EECOM) realised he’s seen a similar pattern of telemetry disruption during an equipment test, when a power supply unexpectedly failed.
“Flight, EECOM. Try SCE to Aux,” he stated over the radio, recalling an obscure back-up power supply switch-over.
His call went unrecognised by Griffin, the CapCom, astronaut Gerald Carr, and Conrad on Apollo 12. However, rookie Alan Bean remembered the SCE switch from a training incident a year earlier during a rare simulation of such a failure, and flicked it over. The move brought the fuel cells back to power, and both Aaron and Bean were credited with saving the mission.
After the excitement of launch, the flight settled into “routine”, with Apollo 12 reaching the Moon late on November 17th, 1969. An initial engine burn put the combined Command and Service Module (CSM) Yankee Clipper and Lunar Module (LM) Intrepid into and elliptical orbit of 110.4 x 312 km (69 x 195 mi). On November 18th, this was adjusted to 99.2 x 121.6 km (62 x 76 mi), and on November 19th, Conrad and Bean entered to the Lunar Module ready for their descent and landing.
This began after Intrepid had separated from Yankee Clipper, with an engine burn on the far side of the Moon, out of contact with Earth. The landing site was set within a region of Oceanus Procellarum, the Sea of Storms that had been given the official name of Mare Cognitum (Known Sea) on account of it having been visited by three automated probes: Russia’s Luna 5 and America’s Surveyor 3, and Ranger 7. The aim was to put Intrepid down in a precisely-denoted area within walking distance of Surveyor 3, and which Conrad had dubbed “Pete’s Parking Lot”.
Apollo 12 Lunar Module Intrepid as seen from the Command Module Yankee Clipper, November 19th, 1969, prior to commencing its descent for landing. Credit: NASA