Logos representative only and should not be seen as an endorsement / preference / recommendation
Updates from the week through to Sunday, May 12th, 2024
This summary is generally published every Monday, and is a list of SL viewer / client releases (official and TPV) made during the previous week. When reading it, please note:
It is based on my Current Viewer Releases Page, a list of all Second Life viewers and clients that are in popular use (and of which I am aware), and which are recognised as adhering to the TPV Policy. This page includes comprehensive links to download pages, blog notes, release notes, etc., as well as links to any / all reviews of specific viewers / clients made within this blog.
By its nature, this summary presented here will always be in arrears, please refer to the Current Viewer Release Page for more up-to-date information.
Note that for purposes of length, TPV test viewers, preview / beta viewers / nightly builds are generally not recorded in these summaries.
Official LL Viewers
Release viewer: 7.1.6.8745209917, formerly the Maintenance Y/Z RC ( My Outfits folder improvements; ability to remove entries from landmark history), dated April 19 and promoted April 23 – No Change
Life is what happens when you’re busy making other plans.
– Allen Saunders, 1957
I was reminded of the above quote – which is often and incorrectly attributed to John Lennon on accord of his 1980 record Beautiful Boy – when I visited Kit Boyd’s exhibition Details in response to a personal invitation for me to do so.
Open until May 23rd, 2024 at Monocle Man Gallery, which Kit co-manages with Lynx Luga, Details brought the quote to mind because of the manner in which it reminds us that the beauty and importance in life is not in what we are or do – but in who we are, how we treat the world and all the details that offer us pleasure and the opportunity to smile and simply to be.
Monocle Man Gallery, May 2024: Kit Boyd – Details
From the moment one enters the foyer of the exhibition space, this over-arching theme is made clear thanks to a trio of images and a quote by artist Elizabeth Murray in celebration of the art of gardening. Supported by the considered use of props, this leads visitors into the main galleried room of the exhibition.
Here, Kit expands on that core theme, presenting us with images of things that can offer those receptive to them an ineffable richness of experience: reading, music, and luxuriating in the simple pleasures brought of a personal indulgence – in this case, that of the enjoyment of coffee.
Monocle Man Gallery, May 2024: Kit Boyd – Details
I admit that as a pianist with a love of music and as a avid reader, Kit’s use of all three as motifs for Details immediately resonated with me, although I was particularly drawn to her use of coffee as a metaphor for the pleasure of personal indulgence, as the images (shown above) encapsulate and personify the detailed craft of home coffee-making, from the initial measuring and grinding of the beans through the anticipation brought forth by the resistance of a cafetiere (aka French press) plunger as it is being pressed down, to the first hint of that rich aroma and the promise it brings. There is a delight to be found in all of the little details of making and sharing coffee which to me make it less of a drink to be slurped and more of an experience to be savoured – particularly with friends at the end of a home-cooked meal.
Above these celebrations of music, reading and indulgence, and around the room’s gallery, Kit offers more reminders of how much pleasure can be had in pausing and taking time to enjoy the beauty and detail Nature has to offer.
Monocle Man Gallery, May 2024: Kit Boyd – Details
To reach the gallery, visitors must take the stairs up from the foyer. Doing so means passing two more sub-themes with Details. The first – formed by Split Personality and Hang In There, both hanging over the stairwell – offers a neat underscoring of the central theme within Details, by drawing attention to the fact that modern life can so often mean losing sight of oneself the the daily struggle to deal with all the demands placed upon us.
The second sits apart from the rest of the exhibition both physically (being largely confined to a single room) and figuratively. It has within in a message that is increasingly important in this current era. Headed by the inspirational quote A woman Should be whatever she wants, it stands as an expression that women have a right to be themselves – not a chattel or confined by a role or title defined by society, but individuals free to express their own selves and indulge in those aspects and details of life which bring them the most pleasure and / or freedom.
Monocle Man Gallery, May 2024: Kit Boyd – Details
In this I found Kit’s uses of images that might be considered erotic to be particularly effective; all too often, erotic expression by women is framed within the boundaries of male pleasure; but why shouldn’t we be free to express and enjoy such eroticism because it pleases us? Thus, within this small but effective display of six pieces (including Moonlight View on the wall outside), Kit frames a question about a woman’s right to self-expression and freedom of choice which casts a net far wider than the images themselves might initially suggest.
Details is an elegant visual essay operating on several levels. One which can be enjoyed simply for the beauty of the art itself, or which can have those layer explored through introspection, recognition and consideration.
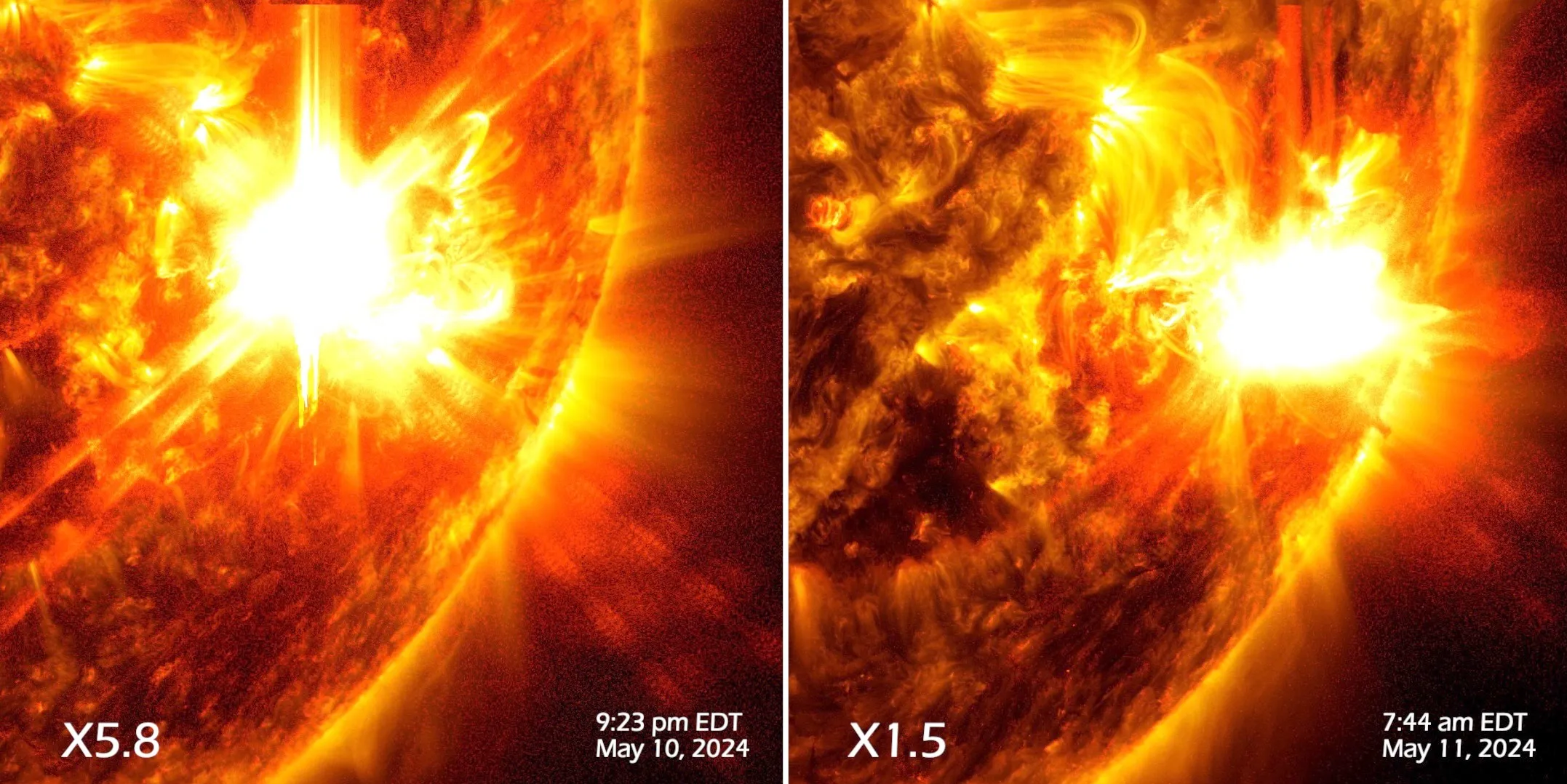
NASA’s Solar Dynamics Observatory captured these two views of massive solar flares, registering X5.8 and X1.5, respectively, on May 11th, 2024. Credit: NASA
We are currently approaching the mid-point in Cycle 25 of the Sun’s 11-year cyclical solar magnetic activity. These are the periods in which observable changes in the solar radiation levels, sunspot activity, solar flare and the ejection of material from the surface of the Sun, etc., go from a fairly quiescent phase (“solar minimum”) to a very active phase (“solar maximum”) before declining back to a quiescent period once more to repeat the cycle again. The “11-year” element is the average length of such cycles, as they can be both a little shorter or a little longer, depending on the Sun’s mood. They’ve likely been occurring over much of the Sun’s life, although we only really started formally observing and recording them from 1755 onwards, which is why this cycle is Cycle 25.
This cycle started in December 2019, and is expected to reach its mid-point in July 2025, before declining away in terms of activity until the next cycle commences in around 2030. Predictions as to how active it might be varied widely during the first year or so, (2019-2021), with some anticipating a fair quite cycle similar to Cycle 24; others predicted it would be more active – and they’ve been largely shown to be correct. And in this past week, the Sun has been demonstrating that while it might be middle-aged, it can still get really active, giving rise to spectacular auroras visible from around the globe.
The Aurora Australis (Southern Lights) seen over waters of Lake Ellesmere on the outskirts of Christchurch, New Zealand on May 11th, 2024. Credit: Sanka Vidanagama via Getty Images.
The cause of this activity carries the innocent name of AR3664 (“Active Region 3664”), a peppering of sunspots – dark patches on the solar surface where the magnetic field is abnormally strong (roughly 2,500 times stronger than Earth’s) – on the Sun, and one of several such groups active at this time. However, AR 3664 is no ordinary collection of sunspots. In a 3-day period between May 6th and May 9th, it underwent massive expansion, growing to over 15 Earth diameters in length (200,000 km), and at the time of writing is around 17 Earth diameters across.
This rapid expansion gave rise to a series of huge dynamic solar flares on the 10th/11th May, with the first a massive X5.8 class flare – one of the most powerful types of solar flare the Sun can produce. Accompanying the flares have been interplanetary coronal mass ejections, which since Friday have been colliding with Earth’s magnetosphere, causing geomagnetic storms and auroras, giving people spectacular night skies.
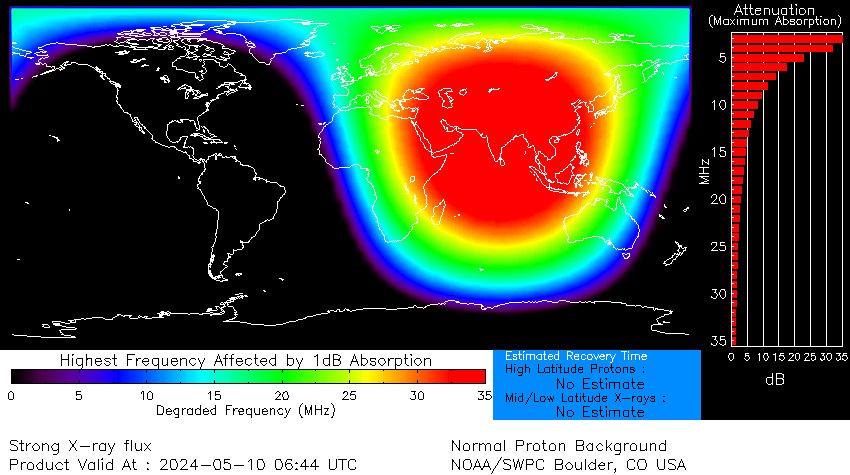
The first of these geomagnetic storms was classified G5 – the highest rating, and the first extreme storm of this type to strike our magnetosphere since October 2023, when damaged was caused to power infrastructure and services in several countries, including Sweden and South Africa. This event caused high-frequency radio blackouts throughout Asia, Eastern Europe and Eastern Africa, and disrupted GPS and other commercial satellite-directed services, although overall, the impact was fairly well managed.
Aurora Borealis (Northern Lights) seen over Vienna during the May 11th geomagnetic storm. Credit: Max Slovenchik via Getty Images
Further storms were experienced through Friday, Saturday and Sunday (10-12th May), varying between G3 and G4 as a result of further CMEs from AR 3664, together with further solar flares in the X4 range. Storms and auroras are expected to continue through until Monday, May 13th, after which AR 3664 will slip around the limb of the Sun relative to Earth.
Thus far, cycle 25 has seen daily sunspot activity around 70% higher during the peak period when compared to Cycle 24, although most of the resultant flares and CMEs have tended to be well below the extreme levels of the last few days. Whether AR 664 marks the peak of events for this cycle, or whether we’ll have more is obviously a matter for the future – but if you’ve not had the opportunity to witness the aurora, the nights of the 12th/13th May might be a good opportunity to do so!
High frequency radio blackouts occurred throughout Asia, eastern Europe and eastern Africa shortly after the X5.8 solar flare of May 11th, 2024. Credit: NOAA/SWPC
AR 3664 is, coincidentally, believed to be around the same size as the sunspot cluster thought to have been responsible for the 1859 Carrington Event, the most intense geomagnetic storm in recorded history (Cycle 10), resulting in global displays of aurora and geomagnetic storms, the latter of which massively disrupted telegraphic communications across Europe and North America (and lead to reports of telegraph operators getting electric shocks from their morse keys and still being able to send and receive messages even with their equipment disconnected from the local power supply!).
Take a Plunge into a Black Hole – Or Fly Around it
Black holes are mysterious (and oft misunderstood) objects. We all know the basics – they are regions on spacetime where gravity is so great that not even light can escape past a certain point (the event horizon) – but what would it be like to fall into one or pass into orbit around one?
In the case of the former, we may think we know the answer (stretching / spaghettification, death + a different perspective of time compare to those observing us from a safe distance), but this is not actually the case for all black holes; it comes down to the type you fall into.
In the case of stellar black holes, formed when massive stars collapse at the end of their life cycle, it’s unlikely you’ll ever actually reach the event horizon, much less fall into it; the tidal forces well beyond the event horizon will rip you apart well in advance. But in the case of supermassive black holes (SMBHs), such as the one lying at the centre of our own galaxy (and called Sagittarius A*) things are a little different.
The first direct image of a supermassive black hole, found in the galactic core of Messier 87, released in 2019 by the Event Horizon Telescope Collaboration. The orange colour is the accretion disk of matter surrounding the black hole some distance from its event horizon. Messier 87 is a giant galaxy 53 million year-years from Earth. Credit: EHO
These black holes are so mind-bogglingly big that the gravity curve is somewhat “smoother” than that of a stellar black hole, with the tidal forces more predictable, possibly allowing the event horizon to be reached and crossed (giving rise to spaghettification). Even so, trying to define what goes on in and around them is still somewhat theoretical and based on abstracted concepts drawn from indirect observation and complex maths.
So, to try to get a better handle on what the maths and theories predict should happen around something like a SMBH – such as falling into the event horizon or being able to orbit and escape such a monster, NASA astrophysicist Jeremy Schnittman – who is one of the foremost US authorities on black holes – harnessed the power of NASA’s Discover supercomputer (with over 127,000 CPU cores capable of 8,100 trillion floating point operations per second), and used available data on Sagittarius A* to generate two visual models which make for a fascinating study.
In the first, the camera takes us on a ride from a distance of some 640 million km from the SMBH (a point at which its gravity is already warping our view of the galaxy), through the accretion disk and into a double orbit around the black hole before gravity is allowed to pull the camera in and across the event horizon. It provides a unique insight into how the galaxy around us would appear, how time and space are bent (and eventually broken), whilst also offering an enticing view of another black hole phenomenon: photon rings – particles of light which are travelling fast enough to fall into orbit around the black hole and loop around it more than once before escaping again.
I’ll say no more here, the video explains itself.
In the second video (below), the camera passes around the black hole for two orbits before breaking away, just like the light particles responsible for the photon rings. As well as the visualisation of the warping effect gravity that a black hole has on light, both videos also demonstrate the time dilation effect created by the SMBH’s gravity.
In the “orbital” video, eat loop around the black hole takes – from the camera’s perspective – 30 minutes to complete. However, from the perspective of someone watching from the video’s starting point, 640 million kilometres away, each orbit appears to take 3 hours and 18 minutes. Meanwhile, in the “fall” video, from the camera’s perspective, the drop from orbit to event horizon lasts 10 minutes. However, from anywhere beyond the black hole, it never ends; the object appears to “freeze” in place the moment it touched the event horizon (even though it is ripped apart nanoseconds after crossing the event horizon).
And these dilation effects assume the black hole is static; if it happened to be rotating – then in the case of camera orbiting the black hole and then braking free, mere hours may seem to have passed – but to the observers so far away, years will have seemed to pass.
Updates
Starliner CFT-1 Delayed
Boeing’s CST-100 Starliner continues on the rocky road to flight status. As I reported in my last Space Sunday, CST-100 Calypso was due to head off to the International Space Station (ISS) on Monday, May 6th, carrying NASA astronauts Barry “Butch” Wilmore and Sunita “Suni” Williams on a Crewed Flight Test (CFT) designed to pave the way for the spacecraft to be certified for operations carrying up to 4 people at a time to / from the ISS.
Whitmore and Williams departing the Neil A. Armstrong Building at Kennedy Space Centre in preparation to board the crew bus from the drive to neighbouring Canaveral Space Force Station for the (subsequently scrubbed) CST-100 launch attempt, May 6th, 2024. Credit: NASA
Only it didn’t; the launch was scrubbed some 2 hours ahead of lift-off due to issues in the flight hardware – although this time, thankfully, not with the vehicle itself. The fault lay within an oxygen relief valve in the Atlas V’s Centaur upper stage, of the Atlas V launch vehicle. The valve was cycling open and closed repeatedly and so rapidly that crew on the pad could hear it – describing is as a “buzzing” sound.
Initially, it had been hoped that the issue could be rectified without moving the vehicle back from the pad at Cape Canaveral Space Force Station, and that a launch date of May 10th could be met. However, by May 8th, attempts to reset the valve via software and control intervention had failed, and ULA – the company responsible for the Atlas V and its upper stage (ironically, the Centaur is produced by Boeing, one of the two partners in ULA) – decided the stack of rocket and Starliner would have to be rolled back to the Vertical Integration Facility (VIF) close to the pad, so the entire valve mechanism can be replaced.
Boeing’s Starliner spacecraft and its Atlas V rocket returning to the Vertical Integration Facility at Cape Canaveral Space Force Station, May 8th, 2024, so a faulty oxygen relief valve on the launch vehicle can be replaced. Credit: NASA
As a result, and at the time of writing, the launch is now scheduled to take place on Friday, May 17th, with a lift-off time targeting 23:16 UTC.
Hubble Back, TESS Down, Up, Down, Up
On April 28th, I reported that the Hubble Space Telescope (HST) had entered a “safe” mode following issues with one of its three remaining pointing gyroscopes. As noted in that piece, the gyroscopes are a vital part of HST’s pointing and steadying system, and while it generally requires three such units for Hubble to operate efficiently, it can get by at a reduced science capacity with only two – or even one, if absolutely necessary – functional gyro.
These gyros do naturally wear out – six brand new units were installed in 2009 (pairs of primary and back-up), but since then, three have permanently failed, and one of the remaining three has been having issues on-and-off since November 2023. Fortunately, in the case of that issue, and now with the April 23rd problem, engineers on Earth were able to coax the gyro back into working as expected. Thus, in the case of the latter, Hubble was back on science gathering duties with all instruments were operational on April 30th.
Hubble (l) and TESS: troubled times. Credit: Robert Lea
Quite coincidentally, another of NASA’s orbiting observatories – the Transiting Exoplanet Survey Satellite (TESS) – also entered a “safe” mode on April 23rd, 2024 – the second time in April its did so. On April 8th, 2024 TESS suddenly safed itself without any warning, and remained off-line for science operations through until April 17th, when the mission team managed to restore full service. However, what triggered the safe mode in the first place has yet to be identified; so when TESS slipped back into a safe mode on April 23rd, engineers looked to see if there was a connection. There, was – but not in the way they’d hoped.
In order to restore TESS to an operational status on April 17th, the mission team had to perform an “unloading” operation on the the flywheels used to orient and stabilise the observatory. This is a routine activity, but it requires the use of the propulsion system to correct for any excess momentum held by the flywheels that might get transferred directly to the spacecraft and cause it to lose alignment. This in turn requires the propulsion system to be properly pressurised. Unfortunately, this was not completed correctly, and the thrusters were left under-pressurised. As a result, a small amount of momentum was transferred to TESS’s orientation, gradually swinging it out of expected alignment until it reached a point where the main computer realised something was wrong, triggered the safe mode and ‘phoned home for help.
Given this, the fix was relatively simple: correctly pressurisation the propulsion system and gently nudge it to stabilise TESS once more so it is aligned in accordance with its science operations.
The following notes were taken from the video recording of the Third-Party Viewer Developer (TPVD) meeting held on Friday, May 10th, 2024. My thanks as always to Pantera for recording the TPVD meeting and providing the video, which is embedded at the end of this article.
The TPV Developer meeting provides an opportunity for discussion about the development of, and features for, the Second Life viewer, and for Linden Lab viewer developers and third-party viewer (TPV) / open-source code contributors to discuss general viewer development. This meeting is held once a month on a Friday, at 13:00 SLT at the Hippotropolis Theatre.
The Maintenance X RC (usability improvements) updated to version 7.1.7.8974243247, May 8.
The WebRTC Voice work was released as a project viewer, version 7.1.4.8947030231, May 8.
The Puppetry project viewer has been withdrawn.
The rest of the current crop of official viewers stands as:
Release viewer: 7.1.6.8745209917, formerly the Maintenance Y/Z RC ( My Outfits folder improvements; ability to remove entries from landmark history), dated April 19 and promoted April 23 – No Change
Release channel cohorts:
Maintenance C RC (reset skeleton in all viewers), version 7.1.7.8820704257, May 6.
Materials Featurettes RC viewer, version 7.1.7.8883017948, May 2.
Maintenance B RC (usability updates / imposter changes), version 7.1.7.8820696922, April 29.
General Viewer Notes
Maintenance X looks to be the next viewer in line for promotion – most likely in week #20.
Following the promotion of Maintenance X, the focus will be on getting the Materials Featurettes viewer promoted, as the simulator-side support for this is already available across the Main grid ( although see below).
White spacing in viewer code has long been an issue in that it can be a mix of both tabs and spaces.
A move to standardise on either tabs or spaces has been mooted but never formalised because of the concerns that any bulk change would produce conflicts in things like code merges.
Signal Linden has been investigating this, and found that providing an appropriate command line option is given, such conflicts between white space using tabs and white space using spaces can be avoided.
As a result, the current Maintenance X viewer does standardise white space.
To avoid potential conflicts when merging to this code base after Maintenance X goes to de facto release status, Signal has produced documentation on how to make such a merge.
Those involved in viewer development (TPVs and self-compilers) are encouraged to read this documentation prior to merging with Maintenance X.
The is the viewer with the new PBR terrain code, support for 2K texture uploads, and PBR mirrors.
The Graphics team believes all issues considered to be showstoppers for this viewer have now been fixed, and the viewer is going through what is hoped will be a final QA pass.
However, there is one remaining issue which can crash the viewer, but this might be down to running the viewer on unsupported hardware as much as requiring a fix.
Remaining issues / updates will be handled through the main glTF development branch of the viewer.
As the server team has switched to the Git Flow Git branching strategy, and there are conversations about moving to this for the viewer as well.
As such, the glTF development branch is a step towards the use of Git Flow.
If the approach works for the glTF work, it will likely be adopted for all viewer development work.
There was a brief debate as to whether the Featurettes viewer will be available for promotion sooner rather than later, with Dan Linden indicating that there is still “quite a bit of testing” still to be done.
This is a glTF project to allow glTF scenes (objects, materials, animations, etc) can be imported to SL as assets and brought in-world as a series of nodes rooted in a prim, with the nodes updated with both tools in the viewer and / or using LSL, and ensuring they stay in synch with all viewers looking at them.
Overall, the idea is a “one touch” import to get a scene from Blender to SL, where it should appear exactly as it is in Blender, modify it as required in SL via the build tools / LSL or – subject to permissions – export it back to Blender for update.
Currently at the prototyping stage, with test viewers and test regions on Aditi able to preview a scene (that is, see it within the viewer without the scene being physically imported into SL) for reference purposes, .
Work is “almost” at a point where a scene can actually be uploaded to SL and stored as an inventory asset and then downloaded and rendered by the viewer – although more back-end work (such as with the CDN pipes) needs to be carried out.
There are multiple questions still to be addressed concerning the overall data model (LOD generation, LI, linking etc., scene export (for updating) and working with the SL permission system, physics / collision shapes, etc.), so definitive answers to question on these topics cannot be properly addressed at present.
A video demonstrating how this works can be seen at 44:43.
This moved into a general discussion on the glTF work – please refer to the video below and my CCUG updates, as linked to above.
WebRTC Voice Update
Summary
A new project intended to move Second Life away from reliance on the Vivox voice service and plug-in, and to using the WebRTC communications protocol (RTC=”real-time communication”).
Roxie Linden is leading this work.
WebRTC is something of a “defacto standard”, being built-in to most web browsers and supporting wide range of real-time communications tools in common use (e.g. Google Meet), supporting audio, video and data communications.
In terms of audio / voice (the primary focus here), WebRTC has a number of standard features expected of audio communications services (such as automatic echo cancellation, better noise cancellation and automatic gain control, etc.) and offers much improved audio sampling rates for improved audio quality.
WebRTC will be supplied within the viewer using a library and wrapper. This will mean no requirement to run a third-party voice plugin (SLvoice.exe, as supplied by Vivox) going forward.
Care is being taking to address potential security issues (e.g. preventing eavesdropping, exposing users’ IP address (by using an internal proxy server), etc.).
The switch to WebRTC also opens the door to adding new features and capabilities to SL Voice, some of which have been long-requested.
Feature requests for WebRTC made via the WebRTC board on the SL Feedback Portal are being evaluated and some are being actioned, together with issues being investigated.
LL will be looking to Linux devs to help give feedback on how well WebRTC is working on their Linux viewers.
As noted above, a WebRTC project viewer is now available via the Alternate Viewers page.
Viewer work is currently focused on bug fixing, and the hope is the viewer will move from project status to RC status “pretty shortly”.
The overall hope is that as WebRTC is a library + wrapper, changes will be fairly localised within the viewer, speeding the implementation process.
The schedule for WebRTC is described as “pretty aggressive” and TPV developers are encouraged to look at the code repository.
Work is in progress / has been completed on getting a simulator Snack RC channel set-up with the required back-end support for WebRTC voice – but this will be spatial voice only, not peer-to-peer / Group or ad-hoc Voice communications for the time being.
Region names for this channel were not given at the meeting.
In line with the aggressive viewer development cycle, the team is looking to have WebRTC support available across at least one full RC channel by the end of June (simulator update schedules permitting) and potentially have the back-end support live across the Main grid by the end of July 2024.
Those wishing to test peer-to-peer, Group and ad-hoc Voice via WebRTC can do so via the Aditi (Beta grid) webRTC1 test region.
There will be further updates to the WebRTC library during the development cycle, as the Lab updates to the latest releases from the WebRTC open-source development website.
As the work progresses, there will be a blog post to provide and overall update on the work, including the proposes schedule for deployment and explanations of any caveats / potential roughness during the transition (see below as well).
WebRTC and Vivox Voice Support
The initial versions of the viewer (project and RC) will support both WebRTC and Vivox for Voice.
As peer-to-peer / Group or ad-hoc Voice support for WebRTC is added to the back-end, things might “get a little weird” as the viewer swaps between WebRTC and Vivox, but Roxie Linden is trying to ensure things are correctly negotiated (e.g. if there is a Group chat going on with everyone using WebRTC, and someone joins from a region still using the Vivox back-end, the viewer will negotiate everyone to using Vivox.
This means that for purely testing WebRTC for Group, peer-to-peer and ad-hoc Voice (as support for these are added to the simulator code), it is important for all testers to be on regions with WebRTC support only.
Voice will not travel across region boundaries between regions using WebRTC and Vivox (and vice-versa)
This should not be an immediate issue, but might become noticeable during the transitional period when WebRTC support is being deployed across the main simulator RC channels and before it is grid-wide.
Voice will obviously work across regions using the same voice service (e.g. between regions which are both running WebRTC).
Given the aggressive schedule for the work, it is hoped that support for both WebRTC and Vivox within the viewer will be for a limited duration.
To ease the workload for creators building for SL21B (opening on Friday, June 21st, 2024), Linden Lab has stipulated they do not have to include Blinn-Phong (aka “SL legacy materials”) fallbacks in their build if they opt to use glTF PBR materials.
This means viewers, in keeping with the expected behaviour, should only display the glTF materials, and should not under any circumstance attempt to display any fallback (as doing so will result in content rendering as grey or white objects).
This is likely to impact any viewers that do not support PBR materials (and content will not look “right”).
However, the above should not be taken to mean that LL are looking to “get rid of” Blinn-Phong (e.g. objects have been created using Blinn-Phong only, they will continue to display using Blinn-Phong reflections, etc.).
Runitai Linden also noted:
Sometime between now and then, we’ll likely start making the LSL scripts that modify Blinn-Phong parameters modify their PBR equivalents, or do nothing when a PBR material is applied. So llSetColor, for example, would set the base colour, not the diffuse colour. That should make life a lot simpler for scripters going forward, as scripters have been giving us feedback that trying to do something simple like that with existing scripts is impossible as they have to do a check to see if a glTF material is applied, and if there is then use llSetPrimParams and if there isn’t, use llSetColor.
It was unclear if this will require a conversion to linear colour (as glTF uses SRGB), given the LSL for GLTF_BASE_COLOR requests linear colour – or whether there is a conversion from linear colour to SRGB when using GLTF_BASE_COLOR. This is to be looked into.
There have been concerns raised over “abuse” of 2K textures (e.g. people being “forced” to use them because “everyone else is”).
Runitai Linden is of the opinion that with functional texture streaming, use of 2K textures is not as big a problem as is being presented in some cases, because the full 2K texture is not necessarily downloaded rendered by the viewer until the viewer zooms right in on the object face using it; otherwise the texture should be displayed at the pixel resolution (e.g. if the face is only taking up 64×64 pixels, then the 64×64 version of the texture is selected and used.
Bakes on Mesh support for 2K textures: this is currently not a project under consideration, but the Lab acknowledged that this might need to be re-thought in terms of what is required and scheduling priority.
It was noted that updating the Bake Service would not be sufficient for 2K texture use, as the service also composites wearable textures, so the allowed texture resolution for all wearable layers will have to be updated in order for BoM to effectively support 2K textures.
That said, updating BoM to support 2K textures is seen by the Lab as a matter of “when” and not “if”. In this, it was further noted that support for the work being shown through the Feedback Portal from users will help LL determine / re-evaluate the priority of the work compared to other projects.
† The header images included in these summaries are not intended to represent anything discussed at the meetings; they are simply here to avoid a repeated image of a gathering of people every week. They are taken from my list of region visits, with a link to the post for those interested.
The following notes were taken from the Thursday, May 9th, 2024 Combat User Group meeting (also referred to as the Combat Committee User Group or CCUG, an abbreviation also used by the Content Creation User Group, and which I’ll not be using in these summaries to reduce the risk of confusion between the two). They form a summary of the items discussed, and are not intended to be a full transcript.
Meeting Overview
The Combat User Group exists as a forum to discuss improvements to the Linden Lab Combat System or LLCS to better support combat in Second Life.
The core idea is to provide additional events and capabilities which sit on top of LLCS to provide combat creators with better tools with which to create better combat systems for their specific scenarios.
The meetings are the result of a proposal document on improving the native damage system in SL, written by Rider Linden, and which is the focus for both the meeting and any work arising from them.
These meetings are conducted (as a rule):
By Rider Linden, with the support of Kyle Linden.
On alternating Thursdays (rotating with the Content Creation User Group) at 13:00 SLT. Meeting dates are recorded in the Second Life Public Calendar.
Initially in text, although voice might be included in the future depending on feedback from those attending.
Rider has updated the simulator side of the combat system. This includes:
The most recent updates to Leviathan Linden’s Game Control event work for game controllers (see below).
Message changes in RegionInfo. There is now an optional CombatSettings block that can be seen by the viewer, it has all the region settings such as regen rate and damage throttle (this requires a viewer-side update to be visible, which is currently in the works).
llDamage is in the process of being updated to reflect the work in this project.
It is hoped that more detailed documentation on “Combat 2.0” will be produced.
There is now a UUID / name for the combat log: COMBAT_LOG_ID or Brigadier Linden.
Comments and Requests
A request was made to add onto the existing llSensor functions (or created a new function) that would allow the option to do an llCastRay (i.e. llSensorNew( string name, key id, integer type, float radius, float arc, float rate, list options )), plus, and when using raycast options, to just return the llDetected events based on successful hits.
This would allow an object to detect Agent or other Objects that is in full view of the object calling the Sensor event, and was seen as helping the likes of “wall safe” melee attacks and explosions all in one call.
The idea was favourably received by Rider and several at the meeting.
There was a question on whether triggering llDamage at a target on safe land, would it trigger on_damage? The answer was no, it would just fail, and also a damage enabled object colliding with something on safe land will not cause damage.
There was some confusion as to which has priority within a region: does the region’s Damage Allowed setting override the Safe setting at parcel level, or vice-versa – and exactly what the “Damage Allowed” actually does (“allowed” does not necessarily mean Damage is “enabled” on setting it).
Rider indicated that within the Camber updates he is writing for the viewer, the term has been changed from “Damage Allowed” to “Enable Combat” – which is clearer as to intent, but again, not necessarily indicative that setting it automatically sets the entire region to Damage “enabled”).
A suggestion was made to make the setting directly more granular at region level via a drop-down, e.g. “Always On”; “Use Parcel Settings”; “Always Off”.
This may become the subject of an additional discussion on the SL Feedback Portal Combat Board.
Rider also indicated that as follow-on work to the current project he intends to allow overriding things like the damage throttle and health regen on a parcel level.
A request (feature request pending) was made for a damage over time function that doesn’t require additional objects.
A general discussion on llRezObjectWithParams and potential improvements – these will be recorded as / when actual changes are made.
Game Controller Support Update
This is a separate, on-going project by Leviathan Linden to provide better support for game controllers (such as X-Box controllers) in Second Life, and exposes input from game controllers to LSL.
It is generally reported on in the weekly Simulator User Group meetings.
Current status:
The feature has been merged into the same server code as Combat2, as noted above.
The viewer is still undergoing work, but a further pre-release viewer (for those on the SL Discord server) should be available in week #20.
The viewer-side work will eventually surface in a project or RC viewer.
Leviathan is additionally overhauling the Flycam options / Preferences tab as well – no details as yet, but updates will be appearing in a future version of the Game Control viewer updates.
The following notes were taken from the Thursday, May 9th, 2024 Governance User Group (GUG) meeting. They form a summary of the items discussed, and are not intended to be a full transcript, and were taken from my chat log and the video by Pantera – my thanks to her as always for providing it.
Meeting Overview
The Governance User Group to a forum for the discussion of topics relating to safety and security in Second Life. Please note this does not include:
Direct discussion of filed Abuse Reports the outcome of investigations, or potential actions taken in abuse cases; this includes providing feedback on reports and / or addressing questions relating to hypothetical situations.
Matters related to copied or stolen content, DMCA or copyright issues / filings.
These meetings are conducted (as a rule):
Every second Thursday of the month, starting at 14:00 SLT.
They are open to anyone with a concern / interest in the above topics, and form one of a series of regular / semi-regular User Group meetings conducted by Linden Lab.
Dates and times of all current meetings can be found on the Second Life Public Calendar, and descriptions of meetings are defined on the SL wiki.
General Notes for May 9th Meeting
The Thursday May 9th, meeting was subject to a special discussion on changes to the Second Life Child Avatar Policy, as announced within an official blog post issued a few hours ahead of the meeting.
This meeting was entirely in text, and these notes are drawn from both Pantera’s video (embedded below), and copies of the chat transcripts forwarded to me be several attendees – my sincere thanks to all who did so.
No: this is not a full transcript of the meeting. However, I have tried to include all relevant comments made by Keira and Tommy Linden.
Tommy Linden provided an overview of the Governance Team and their responsibilities, primarily for those who may not be fully aware of the team’s role:
Handling Abuse Reports (and appeals).
Handling reports of fraud reports.
Account security (with a recommendation that users should use multi-factor authentication (MFA) for added account security).
Marketplace moderation and forum moderation.
Keira Linden then added:
Going forward with these monthly meetings we intend to increase Resident education as it pertains to account security, as well as being more transparent with the community on Abuse actions by publishing some meaningful data around abuse reports. We will also be regularly reviewing and updating trust and safety policies, procedures, and tools based on evolving threats.
What I mean by that [“meaningful data”], is that we intend to publish data pertaining to abuse issues as were able to.
It was further noted that LL is currently in the process now of evaluating several different products and systems to help with proactive moderation.
No specific details were made available, but it was indicated that the tools being considered “will help the team identify potential violations of the” Terms of Service or Community Standards.
This drew speculation that AI tool will be used and questions asked on real-time chat monitoring. Keira responded by stating (Video: 18:42):
We are not going to discuss the specifics around the tools at this time. As more decisions are made we may be able to offer more information. Right now, we are looking at a number of different tools that have different capabilities.
Tommy expanded on how the team approaches such investigations, starting with the initial Abuse Report (which needs to be correctly completed (please see my Abuse Report tutorial on this, to which he and other members of the Governance Team contributed for notes on completing ARs), and to which he added:
Each report is thoroughly investigated as we understands that there are always 3 sides to every story. While we always try to take an educational approach first when responding to reports, there are some issues that are so severe that it will result in a termination instead. We also want to clear up the misconception that the submitting of multiple reports from Residents, also known as AR parties, does not mean that action will be taken, or even be taken in a quicker timeline.
On the appeals process, he stated:
Appeals are thoroughly investigated by someone other than the initial agent in the investigation. This reviewer treats this as a new investigation and again looks at all the criteria available before making their decision. In addition, as part of the full review process, the appeal does get reviewed by a committee before a final decision is made. We don’t take action before completing our investigation, unless we need to hold an account temporarily for its own security. Action is only taken after an investigation is completed. Without disclosing how our internal tools work, we have taken every measure possible to remove any potential bias in every investigation.
Please also refer to the official General Discussion section of the official forums for multiple discussions on this topic, and specifically, this thread.
Meeting Discussion and Quotes
This limits of this discussion were set by Keira Linden at the opening on the meeting (Video 5:47):
We understand many of you have come here to potentially protest, or debate the changes we have made to our child avatar policy, and while we understand that not everyone agrees with the changes, we are not here today to debate the policy. That said, I am completely open to feedback. If you have feedback regarding the policy, we encourage you to submit a support ticket, or use our feedback portal.
General Notes
The primary forum thread on the subject is being read comprehensibly by Tommy Linden, and as a result, the FAQ is being updated to provide further information and clarification. As such, it should be seen as a living reference document.
New images have been added to the FAQ to illustrate what LL is looking for with regards to child avatars.
Male child avatar modesty layer example provided by Linden Lab
It was noted that there have been requests on the forums to have the [presumably the upper] back of the modesty layer for female avatars be optional, and Keira indicated that might be possible, but is currently subject to review and approval.
Whatever approach is used – (e.g. baked into the skin at creation or otherwise), the modesty layer cannot be intentionally removed / ignored (or, presumably, intentionally masked). Keira (video: 52:20 and 52:51):
Cannot be removed means just that. It cannot be removed by any means. If a new [skin] is applied then it will need to have the modesty layers.
In terms of how the modesty layers should work, Keira stated (video: 28:24):
The other concern in regards to the modesty layer is how it will impact existing content. To be clear, we are requiring skin sellers to have the areas shown in the images use a modesty layer on the skin files. However, for existing content, bake layers and alphas can be a viable temporary solution but we would STRONGLY encourage everyone to move to a more permanent solution.
Female child avatar modesty layer example provided by Linden Lab
Keira confirmed that modesty layers will be required by any avatar “presenting as under the age of 18”, and there will be a period of adjustment (video: 28:58-30:44 – comments concatenated here for ease of reading):
We understand there is some confusion regarding the age range that would be expected to follow the new policy, so we want to clarify that anyone presenting under the age of 18 will be required to follow the policy in regards to child avatars. Regarding enforcement of these new policies, I do know that there will be an adjustment period We fully intend to take an educate and inform approach to these issues, and not actively seeking to strong arm enforce these unless there is an egregious violation of the terms of service, such as sexualized age play.
General Comments / Concerns
In response to questions related to the use of furry avatars (e.g. will cubs her required to have modesty layers), anime characters (who can appear to be under 18 even when not), petite avatars, Keira Linden stated (video: 31:36-35:01) – comments from each concatenated for ease of reading):
I can assure that appearance alone is not the deciding factor in most cases, when we are looking at abuse reports.
As was mentioned before, we do have an appeals process that I believe allows for many evaluations of that appeal. If that proves to be insufficient, we will re-evaluate the process. There are some things that we cannot change, but when it comes to processes and policies I believe that those require frequent review and tweaking to keep up with current Internet trends and community use.
With Tommy further adding:
As someone who has worked on the Governance team for the past 12 years both as an agent and the leader of the team, I can say that we have very rarely taken action on just appearance alone, there has almost always been additional factors leading to action.
For those asking about clarification on age, regardless of your gender, whether or not you are a furry, or participating in the anime community, if you are presenting as under the age of 18, that is required to follow our policy regarding child avatars.
(video from 35:02 onwards): Various concerns and questions were raised, relating to (responses quoted, where given):
The use of non-human avatars, and the use of modesty layers.
The requirement for female babies to have a “bra” modesty layer potentially sexualising them.
Whether anyone in an under-5 avatar can requires the “bra” modesty cover when just the “panties” cover should suffice.
I hear you all on the modesty layer on infants, and is something I am willing to consider, but I can’t promise that any change will be made at this time.
Had the fact that by enforcing baked modestly layers in skins potentially “breaks” the baby / young child skin market (which is currently unisex).
Can the technical aspects of the modesty layer can be discussed in more detail between creators and the Lab.
I am open to discussing it further. Feel free to email me or send in a support ticket to my attention.
How is “presenting as” treated? Many have Profiles which present as children, but adopt adult avatars for certain aspects of their SL. Are they allowed to visit with friends who have homes on A-rated regions, or A-rated combat regions? If they have a Profile referencing being as a child and are reported for being child whilst visiting an A-rated region, how would the report be evaluated? What happens if someone as a child avatar inadvertently teleports to an A-rated region and gets reported?
Kiera (video: 43:38, 44:16 and 48:02 – concatenated into a single response for readability):
You can still go there just not as a child avatar If you are reported and you are in an adult avatar that is how we will evaluate the report. If a report is made we do look at the intent of the Resident. We can tell if someone popped into a region then immediately left.
Are adult bodies such as Maitreya allowed for teens (Maitreya has some geometry in the groin that cant be removed); does the need for child avatars to be “G-rated” mean they are unable to purchase / wear M-rated items (jewellery, hair, etc.)?
Questions passed as unanswered will hopefully be addressed through other means.
† The header images included in these summaries are not intended to represent anything discussed at the meetings; they are simply here to avoid a repeated image of a rooftop of people every week. They are taken from my list of region visits, with a link to the post for those interested.