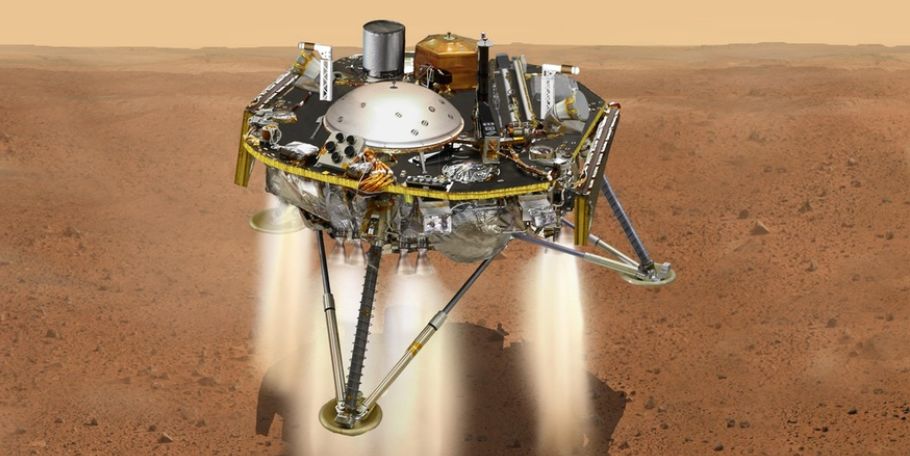
On Monday, November 26th, 2018, the latest in a series of NASA missions, the InSight lander – built with international cooperation -, arrived on the surface of Mars.
As noted in my previous Space Sunday report, confirmation that InSight (Interior Exploration using Seismic Investigations, Geodesy and Heat Transport) had safely arrived could only be received by mission control at NASA’s Jet Propulsion Laboratory (JPL) after the team there had endured the “seven minutes of terror”, more officially known as the Entry, Descent and Landing (EDL) phase of its journey, the time when the vehicle would enter Mars’ atmosphere and hopefully make a reasonably soft-landing on the planet’s surface.
While undeniably tense, when it came to it – and watched live via social media, and assorted web broadcast channels put out by NASA – EDL was completed flawlessly. After separating from is cruise element around 7 minutes prior to EDL, InSight, protected by its heat shield and aeroshell, entered the upper reaches of the Martian atmosphere almost precisely on schedule, where over a 4-minute period, the frictional heat created by is passage helped decelerate it from an initial entry velocity of 19,800 km/h (12,300 mph) to 1,400 km/h (860 mph). At this point, telemetry once again being relayed, the supersonic braking parachute was been deployed.
After this things moved quickly: the heat shield was jettisoned from under the lander, which itself dropped free of the parachute and conical aeroshell, using its 16 rocket motors to achieve a “soft” landing on the surface of Mars – travelling at just 8 km/h (5 mph). A video compressing the seven minutes into just over a minute and a half captures the landing – and the joy at mission control (not the celebratory handshake at 1:19!).
It had been anticipated that the first “official” confirmation that InSight had arrived safely would be a “beep” sent directly to Earth from the lander’s X-band radio – and this might be followed a few minutes later by a photograph taken by the lander. As it turned out, and thanks to two tiny CubeSats – of which more in a moment – it was the photo that arrived first. Grainy and indistinct due to it being taken by a camera still with its protected lens cap in place (itself splattered with dust), it shows a rocky surface and a tightly curved horizon – caused by the camera still being in its stowed configuration.

Initially after landing, InSight was operating on battery power whilst awaiting the dust to settle out of the atmosphere so the two circular solar panels could be deployed. This occurred some 30 minutes after touchdown, with the panels proving so efficient that . So efficient are these panels that during their Martian Sol of operation, they set a new record for power generation: 4,588 watt-hours – well over the 2,806 watt-hours generated in a single Sol by the “nuclear powered” Curiosity.
The efficiency of InSight’s solar arrays will deteriorate over time – the result of general wear-and-tear and the influence of dust that will inevitably accumulate on them – but the power levels have been more than enough for the lander to start flexing its muscles – including testing its robot arm, which is essential to it being able to place key experiments on the surface on Mars.
It is going to be early spring 2019 before InSight is fully involved in its science mission. There are a lot of equipment check-outs and calibration test to be undertaken, as well as the surface deployment of key instruments. However, there have been some external concerns raised over how well InSight will fulfil its science objectives. As data started coming back from the lander, it was noted that it had touched down in a shallow impact crater, almost completely filled by sand and dust (such craters being known as “hollows” on Mars), which has given InSight a 4-degree tilt.
Overall, the lander can in theory operate with up to a 15-dgree cant (the result of one of this three landing legs coming down on a boulder, for example), but here is a worry about how the tilt may impact placing the Seismic Experiment for Interior Structure (SEIS) and HP3, the Heat Flow and Physical Properties Package, on the surface of Mars, and how the material filling the hollow might affect the operation of HP3’s “mole”, which is designed to burrow into subsurface rock and measure the heat flow from the centre of the planet.
Nevertheless the mission team remain in a positive mood and are delighted with both the landing and the first few days of operations.
We couldn’t be happier. There are no landing pads or runways on Mars, so coming down in an area that is basically a large sandbox without any large rocks should make instrument deployment easier and provide a great place for our mole to start burrowing.
– InSight project manager Tom Hoffman
Further examination of the lander’s surroundings will be made once the dust covers have been ejected from the on-board cameras, something that should happen in the next few days. This work will include a careful study of the ground to determine the best placement for SEIS and HP3, as well as a general surveying of the location, which in the initial images, appears a lot less rock-strewn than other locations visited by landers and rovers.
We are looking forward to higher-definition pictures to confirm this preliminary assessment. If these few images—with resolution-reducing dust covers on—are accurate, it bodes well for both instrument deployment.
– Bruce Banerdt, InSight principal investigator
I’ll have more on InSight as the mission develops.
Continue reading “Space Sunday: InSight, MarCO and privately to the Moon”