It’s been a quiet time for the last three weeks as far as news from NASA’s Mars Science Laboratory is concerned. There have been a couple of reasons for this.
It’s been a quiet time for the last three weeks as far as news from NASA’s Mars Science Laboratory is concerned. There have been a couple of reasons for this.
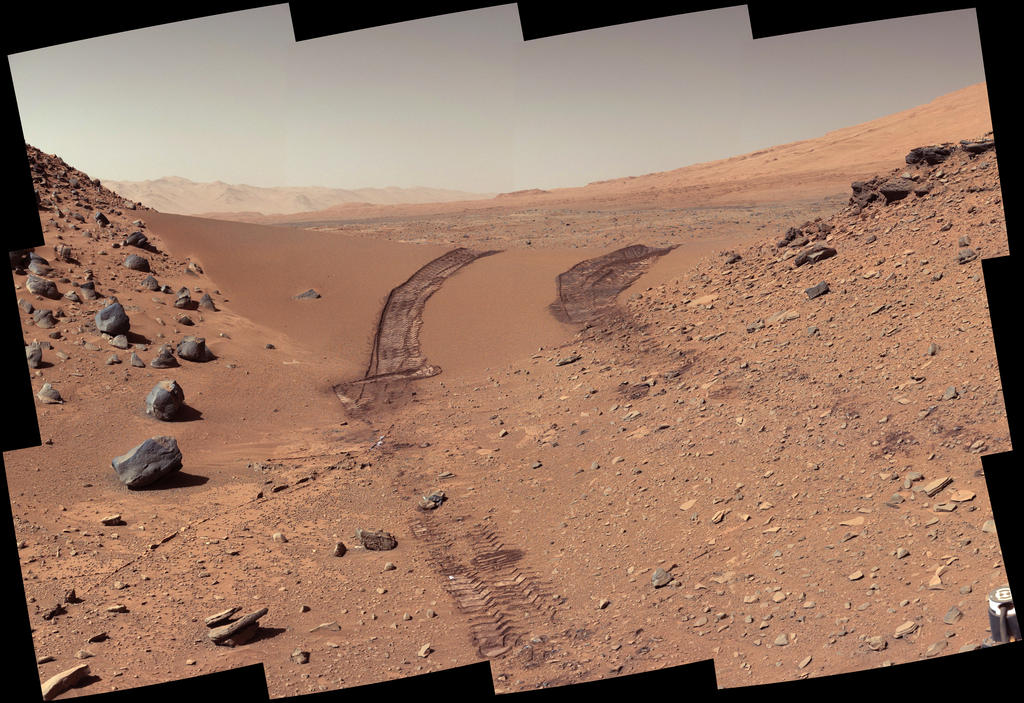
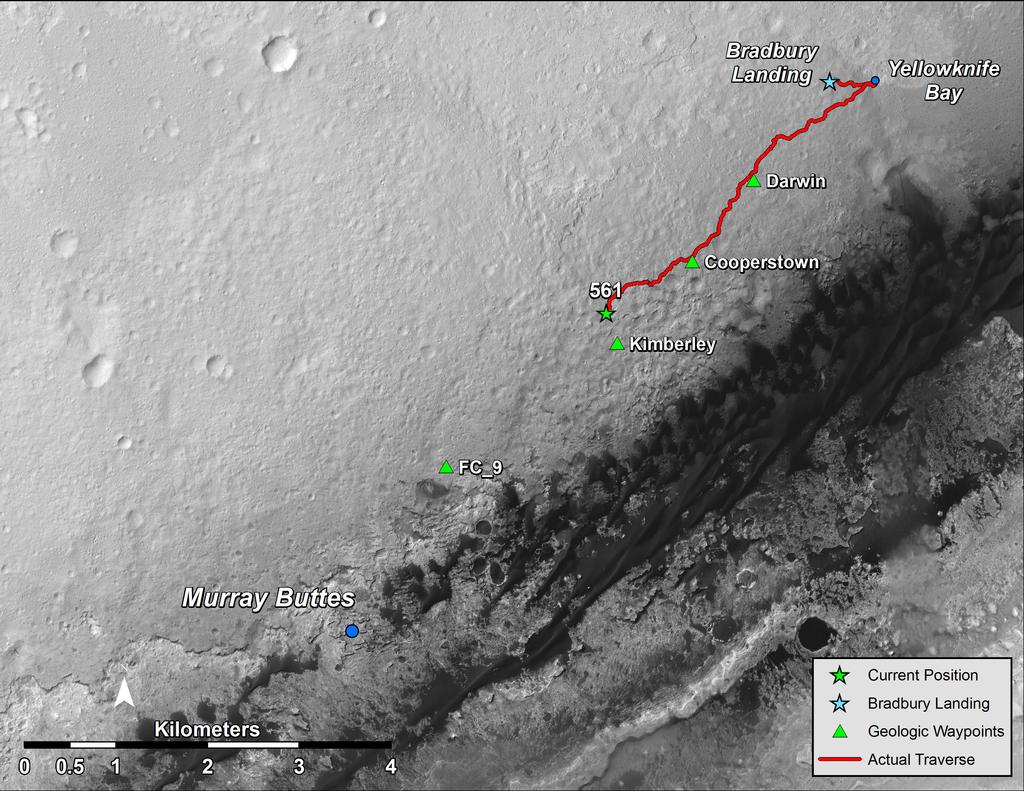
The primary reason is that the rover is on a slow but steady drive towards its next intended science waypoint while en route to the lower slopes of “Mount Sharp”. At the start of February, that waypoint had been around half a kilometre from the rover. However, concerns over the amount of wear and tear being suffered by the rover’s wheels as a result of traversing very rough terrain meant that Curiosity took a diversion.
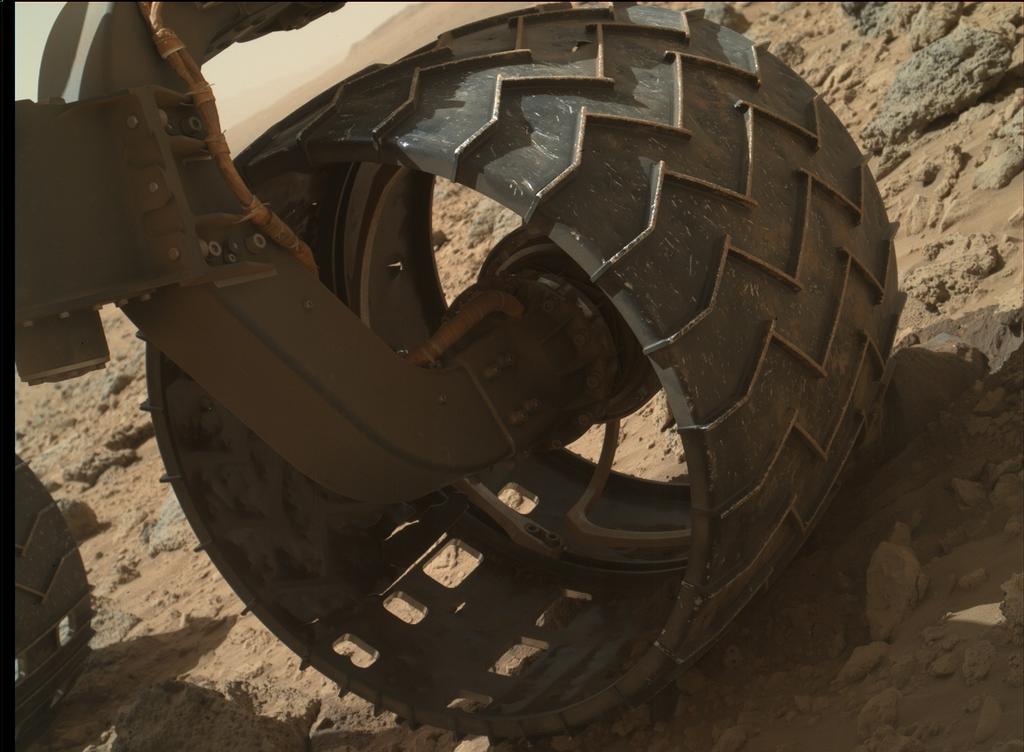
While this put the rover on much smoother – comparatively speaking – terrain, it also meant the route to the waypoint had become more circuitous, requiring Curiosity cover around a kilometre in order to reach its intended stopover. In addition, engineers have been periodically checking the amount of damage to the wheel which may be accruing, further slowing daily progress, as well as continuing to test alternative driving methods to further ease the load on the wheels – such as letting the rover drive backwards towards its destination. However, the good news is that in the month since crossing Dingo Gap on February 18th, wear on Curiosity’s wheels has been around one-tenth what had been experienced per month during the months traversing the rougher terrain.
Additional tests using Curiosity’s test bed “twin” on Earth have revealed that the rover could sustain substantially more damage than incurred so far, including breaks in the wheel treads themselves, and still remain operational. However, given the potential duration of the mission – Curiosity’s nuclear “battery” could provide it with an operational life measured in a couple of decades barring other failures – means caution is key at this stage of the mission.
“The wheel damage rate appears to have levelled off, thanks to a combination of route selection and careful driving,” said JPL’s Richard Rainen, mechanical engineering team leader for Curiosity. “We’re optimistic that we’re doing OK now, though we know there will be challenging terrain to cross in the future.”
MRO Computer Glitch
The other break in news, although brief in nature, was caused by an unexpected issue with Curiosity’s primary communications relay between itself and Earth – the Mars Reconnaissance Orbiter (MRO) unexpectedly switched itself into a “safe” operating mode on Sunday March 9th. This immediately brought a cessation in the orbiter’s communications relay function for both Curiosity and Opportunity on the surface of the planet, although it did not put either rover entirely out of communications with Earth.

While MRO forms the primary means of communications between the surface of Mars and mission control at NASA’s Jet Propulsion Laboratory facility at the California Institute of Technology, the rovers on Mars can also use NASA’s Mars Odyssey as a relay – and, should it be required, Europe’s Mars Express. However, Mars Odyssey, which has been operating around Mars for almost twelve and a half years, has much lower bandwidth and data transmission rates compared to MRO, which reduces the amount of information which can be relayed to Earth at any given time.
MRO’s issue first became apparent on March 9th, when the orbiter performed an unplanned swap between its duplicate computer systems. This is the prescribed response by a spacecraft when it detects conditions outside the range of normal expectations; the safe mode is initiated to reduce the risk of whatever caused the out-of-range event from being repeated by the second computer and potentially permanently harming the vehicle while matters are investigated. MRO has experienced unplanned computer swaps triggering safe-mode entry four times previously, most recently in November 2011, the root cause of which still hasn’t been clearly determined.
The March 9th safe mode entry also included a swap to a redundant radio transponder on the orbiter, marking the first time this has happened during the vehicle’s eight years in orbit around Mars. Whether or not the transponder issue triggered the computer swap-out is unclear. However, after carrying out a series of diagnostics on MRO from Earth, the mission team began bringing the orbiter back-up to full operational capabilities on March 11th, leaving it operating on the computer the swap-out switched to, together with the previously redundant radio transponder.
“The spacecraft is healthy, in communication and fully powered,” Mars Reconnaissance Orbiter Project Manager Dan Johnston said on March 11th. “We have stepped up the communication data rate, and we plan to have the spacecraft back to full operations within a few days.”
Charting a New Frost Channel
Since that event, MRO mission scientists have released a photo comparison showing the active nature of the Martian environment. The image shows two pictures of the same slope in the wall of crater Terra Sirenum, located in the southern highlands of Mars. There were captured some two and a half years apart (roughly equivalent to 1.2 Martian years), in November 2010 and May 2013 respectively.

The right-hand (May 2013) clearly shows the creation of a new gully down the inner wall of the crater, created when material flowing down the older channel broke out to form a new channel and corresponding fantail deposit. While the material responsible for the new gully was liquid in nature, as the event occurred in the Martian winter period in the southern hemisphere, it is believed that carbon dioxide ice, and not water, played the major role in forming the new channel.
NASA had previously experimented with dry ice to see if it could be responsible for such gullies, with interesting results.
Continue reading “On reaching Kimberley, managing communications and solving mysteries”