Last time around, I mentioned that the Curiosity team was looking at alternative routes to get the rover down to the crossing-point for the start of its explorations of “Mount Sharp” at the centre of Gale Crater and, more immediately, to a target of interest for further science studies.
The desire to seek alternative routes came as a result of periodic examinations of Curiosity’s aluminium wheels revealing they’d suffered more wear and tear during recent traverses of very rough terrain than had been anticipated. While not a threat to the rover, mission managers would still prefer to lessen the impact of the rover’s southerly transit over what has proven exceptionally rugged ground.
At the time of writing that last update, planners were considering taking Curiosity over a sand dune roughly a metre (3 feet) in height sitting between two rocky scarps, as the terrain beyond the dune, dubbed “Dingo Gap”, appeared to be markedly less rough. While a little more circuitous than a direct-line drive, crossing the dune would still allow the rover to get to its next target for taking samples, a rocky outcrop dubbed “KMS-9″.
The view over “Dingo Gap”, captured on Sol 528 (January 30th, 2014), shows a westward-leading valley of much smoother terrain compared to the rover’s recent drives. The largest of the dark rocks on the sand to the right of the scene are about 60 cm (2 feet) across. This image was captured via Curiosity’s Mastcam and is shown unprocessed: the colours are as the human eye would see them on Mars under local daylight conditions (click to enlarge)
While other routes were under consideration as well, it was decided to take Curiosity “Dingo Gap” after it had been ordered to drive up to the base of the dune and take a peep directly over the top of the mound to get a detailed view of the land on the other side. The rover actually made the crossing on Sol 535 (February 6th), and a series of nine black-and-white images captured by the rear hazard-avoidance cameras (Hazcams) were later strung together to form a short video of the crossing.
series of nine images captured by the rover’s rear Hazcams show progress over “Dingo Gap”. At the start of the sequence, Curiosity’s front wheels were on the base of the dune’s slope, and the entire traverse covered a distance of some 7 metres (23 feet) – click to enlarge
With the crossing made, Curiosity is set to travel to “KMS-9”, something over half a kilometre away, and which comprises three different terrain / rock types offer a relatively dust-free area for examination and further drilling operations. The area is one of the number of potential “waypoints” identified from orbit that missions scientists hope will help provide greater insight in the soil, rock and climatic conditions which may have once existed around “Mount Sharp” and help build up a clearer picture of changes in conditions which may have occurred within the region through which the rover is travelling.
The progress of NASA’s Curiosity rover on Mars has slowed somewhat in January, the rover having covered around 265 metres (865 feet) in the month, bringing the total distance Curiosity has travelled since arriving on Mars in august 2012 to some 4.89 kilometres (3.04 miles).
Part of the reason for the slow-down has been due to the recent traverse of considerably rougher terrain during the rover’s trek towards its encounter with “Mount Sharp” having resulted in somewhat more wear-and-tear of the aluminium wheels than had perhaps been anticipated.
While not of a serious concern – the rover can function with quite substantial damage having being done to the wheels – the mission team has nevertheless been looking for ways and means for the rover’s progress to continue at a reasonable pace, but without exposing the wheels to excessively rugged terrain.
Most recently, this has involved examining a possible gateway to a smoother route down to the point at which they plan to commence explorations of “Mount Sharp’s” lower slopes. This gateway is a 1-metre (3-ft) high sand dune sitting between two rocky scarps. Dubbed “Dingo Gap”, the dune appears to provide access to a smoother route heading south-west and towards the rover’s ultimate destination.
Dingo Gap, imaged on Sol 526 (January 28th, 2014). Taken by the “left eye” of Curiosity’s Mastcam, this mosaic shows the metre high dune in the upper centre of the picture, sitting between two rocky scarps and about 35 metres (115 ft) from the rover. The far horizon of the image is the wall of Gale Crater (click to enlarge)
“The decision hasn’t been made yet, but it is prudent to go check,” said Jim Erickson, NASA’s project manager for Curiosity. on January 28th. “We’ll take a peek over the dune into the valley immediately to the west to see whether the terrain looks as good as the analysis of orbital images implies.” The orbital images he referred to came from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter, while the “closer look” actually took place on January 30th.
In addition to using alternative routes, the drive team has also been evaluating possible driving techniques that might help reduce the rate of wheel punctures, such as driving backwards or using four-wheel drive instead of six-wheel drive. This may help is situations where some of the wheel damage may have resulted from the force of the rear wheels pushing the middle or front wheels against sharp rocks, rather than simply the weight of the rover driving over the rocks.
As a result of the slow-down, JPL are considering introducing some evening and weekend drives into the February drive schedule.
A mosaic showing Dingo Gap (foreground) and the terrain beyond, as imaged by Curiosity’s monochrome Navcams on Sol 528 (January 30th, 2014) – click to enlarge
More Drilling
As well as providing a route southwards, Dingo Gap may also allow the rover easier access to its next waypoint on the journey, where it is expected to carry out further drilling and sample-gathering activities. The site, identified as “KMS-9” is around 800 metres (half-a-mile) from Curiosity’s current position when measured in a straight line – but that is over rugged terrain the mission team would potentially avoid if possible.
The drilling site has been imaged from orbit, and holds significant appeal to the mission team, as Katie Stack, a science team collaborator explained. “At KMS-9, we see three terrain types exposed and a relatively dust-free surface. This area is appealing because we can see terrain units unlike any that Curiosity has visited so far. One unit has striations all oriented in a similar direction. Another is smooth, without striations. We don’t know yet what they are. The big draw is exploration and seeing new things.”
“KMS-9” won’t be the first rocky area examined by Curiosity in 2014. On January 15th, the rover examined a rock dubbed “Harrison”, which revealed linear crystals with feldspar-rich composition.
Earth-side Tests
At the same time as the efforts to select a candidate route have been underway, other members of the team have been carrying out further tests to validate capabilities for the rover to drill for rock samples on the kind of slopes it will likely encounter when exploring and climbing “Mount Sharp”.
In particular, the tests have been focused on the drill mechanism’s ability to withstand damage as a result of slippage when the rover is parked on a sloping surface. So far, results have shown that the drill mechanism can withstand slippage of around 5 centimetres (2 inches) in the rover’s position without any real damage occurring. Such slippage could be induced through a number of circumstances, including the angle of slope, cumulative damage to the wheels which may impact their ability to grip the surface beneath them, and material on the surface which may also impact the rover’s ability to sustain a solid grip on underlying rock.
Curiosity, the NASA rover carrying the Mars Science Laboratory is continuing towards its rendezvous with the foothills of “Mount Sharp” (Aeolis Mons) in Gale Crater, Mars. As such, there is little coming out of NASA in terms of updates on progress (which would likely sound the robotic equivalent of “Are we there yet?” “No!” cycles).
However, on January 9th, NASA released several images captured by the High Resolution Imaging Science Experiment (HiRISE) camera aboard the Mars Reconnaissance Orbiter (MRO). Taken in both black-and-white and colour, these show Curiosity’s long and lonely drive across the “magnificent desolation” of Gale Crater.
Tracking Curiosity’s progress towards “Mount Sharp” – the arrows point towards to tracks left by the rover as it heads southwest towards a gap in the dune field (seen lower right) sitting between it and the foothills of its primary destination. For scale, the wheel tracks are about 3 metres (10 feet) apart (click to enlarge)
The images show the rover’s tracks as it manoeuvred around obstacles on its route toward the lower slopes of “Mount Sharp”, and were captured in early December 2013 as the MRO, which acts the and primary communications relay between Earth and Curiosity, passed over the rover’s location at an altitude of some 250-316 kilometres (160-196 miles).
HiRISE first imaged the Mars Science Laboratory spacecraft while it was descending on a parachute to place Curiosity on Mars 17 months ago. Since then, it has provided updated views of the rover’s traverse, as seen from orbit.
A rover’s progress: a large image of Curiosity’s journey, as captured by the HiRISE camera aboard the Mars Reconnaissance Orbiter in December 11th, 2013. The rover itself is just out of frame to the lower left of the image. The orientation is so that north is to the top (click to enlarge)
At the time the images were captured, Curiosity had clocked-up some 4.61 kilometres (2.86 miles) since its arrival in Gale Crater in August 2012. The long trek in a generally southwest direction commenced in the latter half of 2013, after the rover had spent some six months within the “Glenelg” and “Yellowknife Bay” areas of the crater studying a range of rock and surface conditions which allowed Curiosity to meet criteria relevant to its primary mission objective – to determine whether Mars may have once harboured conditions in which life might have arisen.
NASA’s Curiosity Mars rover and tracks left by its driving appear in this portion of a Dec. 11, 2013, observation by the Mars Reconnaissance Orbiter. The rover is near the lower-left corner of this view. For scale, the two parallel lines of the wheel tracks are about 3 metres (10 feet) apart (click to enlarge)
NASA’s Curiosity rover Has completed a significant software upgrade, marking the third time the rover’s flight software has been updated since arriving on Mars in August 2012. The update was originally scheduled to take place over the course of a week in early November. However, during the course of the software upload, Curiosity unexpectedly committed a (non-threatening) software reboot (technically referred to as a “warm reset”), which eventually saw the software reverted to its original state.
Analysis of data received as a result of the reset revealed a catalogue file for the existing onboard software was triggered as a result of the newly uploaded flight software. As a result of this analysis the rover team were able to determine the steps required to ensure the correct software execution took place before allowing the rover to resume normal operations using the existing flight software (version 10).
A second attempt was then made up upload and execute the new flight software (version 11) over the course of a week earlier in December, which saw the rover transition to the new software without incident.
The new software further expands the rover’s ability to deploy and use its robot arm and the turret-mounted science instruments and tools while the vehicle is operating on sloping surfaces – a vital requirement once Curiosity starts exploring the lower slopes of “Mount Sharp”. The software also further enhances the rover’s ability to safely store and retrieve navigational data, increasing its autonomous driving abilities even further.
Over the last several weeks, Curiosity has been driving over exceptionally rugged terrain while en route to a point where it can traverse a series of sand dunes lying between it and “Mount Sharp” and start its explorations there. As a result of this, concerns have been raised that the rover’s six aluminium wheels are perhaps suffering an accelerated wear.
While the wheels can sustain a significant amount of damage without impairing the rover’s driving abilities, the mission team have decided to locate and drive the rover to a relative smooth area of Gale Crater where the robot are can be deployed to use the Mars Hand Lens Imager (MAHLI) to inspect each wheel for holes and other signs of damage.
“We want to take a full inventory of the condition of the wheels,” said Jim Erickson, project manager for the NASA Mars Science Laboratory Project. “Dents and holes were anticipated, but the amount of wear appears to have accelerated in the past month or so. We would like to understand the impact that this terrain type has on the wheels, to help with planning future drives.”
Depending upon the outcome of these checks, it may be that mission planners will opt to review the rover’s course to “Mount Sharp” and destinations along the way in order to try to reduce the amount of time spent traversing such rough terrain.
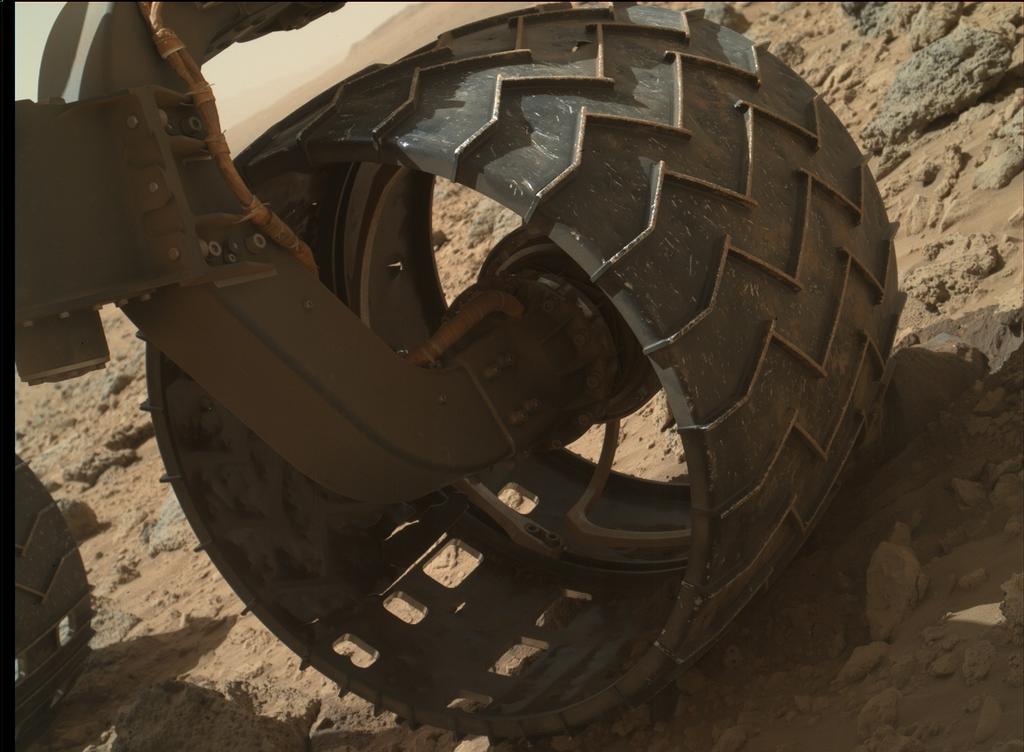
Curiosity’s left front wheel shows signs of accelerated wear as a result of travelling across terrain that is rough even by Martian standards. As a result of this, mission managers plan to have all six wheels checked-out for wear and tear in the near future. This image was taken by the Mars Hand Lens Imager (MAHLI) mounted on the rover’s robot arm turret on Sol 469 (November 30th, 2013). Note, also, the heavy coating of dust and dirt on the wheel’s drive arm. At the time this image was captured, Curiosity had driven 4.47 kilometres (2.78 miles).
Almost Four Miles
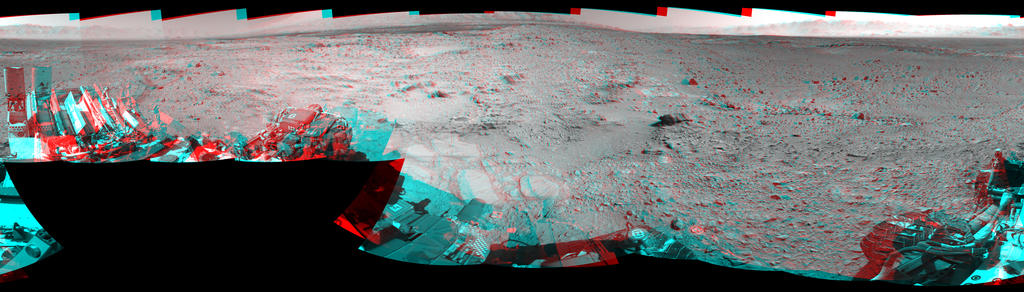
On December 8th, 2013 – Sol 477 of the mission, Curiosity clocked-up a distance of 4.61 kilometres (3.86 miles), and the rover paused to take a series of images of its location using the mast-mounted monochrome Navcams, which were then put together to form a cylindrical mosaic (below).
Click to enlarge
In the image, north is at either end of the mosaic, and south in the centre . The black squares are areas outside of the visual range of individual images used to create the mosaic. The images were individually captured by the left and right Navcam systems, and the two sets of images combined to offer a stereo view of Curiosity’s surroundings which can be seen using red-blue glasses with the red lens on the left (below).
Click to enlarge
In my last MSL report, I referenced the research into the age of the rocks in Gale Crater and the effects of weathering and erosion. Understanding of both helps scientists learn about the processes at work close to the surface of Mars, infer whether features were predominantly formed by action of wind or water (or a combination of both, and where one took over from the other), and understand relative levels (in ages) different rock has been exposed to cosmic radiation. Further images used in that research have since been released.
Click to enlarge
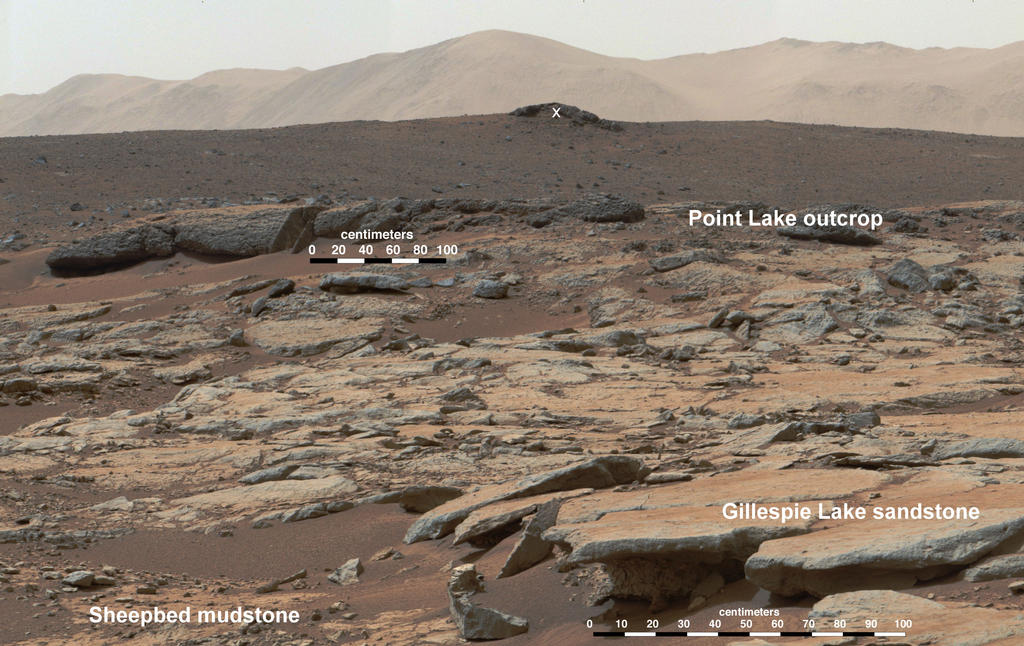
The image above show a mosaic put together using pictures captured by Curiosity’s Mastcam system on Sol 188 (February 14th, 2013), while the rover was operating in the “Yellowknife Bay” area. Looking west-northwest, the scene shows the various levels of rock which have been exposed in a process known as wind-driven scarp retreat, which can be described as the sideways erosion of a vertical face.
In the lower left corner is the “Sheepbed” mudstone deposit, which contains the “Cumberland” rock formation from which Curiosity gathered drilling samples. Gas analysis of the samples (some of which were saved by the rover and further analysed during the long road trip towards “Mount Sharp”) suggest the rock has only been exposed for about 80 million years – which is a lot more recent an exposure than previous estimates of the overall exposure of the Martian surface to the rigours of cosmic and solar radiation had suggested.
The evidence for wind erosion being the primary cause of exposure is strongly suggested to the right of the image, where erosion of the mudstone is clearly undercutting the “Gillespie Lake” sandstone layers. These layers were about 15.4 metres (50 feet) from the rover. The mid-image “Point Lake” layers are some 36 metres (118 feet) from the rover, while the rocky outcrop marked by the white “X” is around 240 metres (780 feet) away, and on an elevation about 13 metres (43 feet) higher than “Sheepbed” and “Gillespie”.
A key aspect of understanding how and when such exposure of previously hidden rock layers occurred is that it gives the rover team better insight for selecting future targets for drilling to investigate whether organic chemicals have been preserved in rocks.
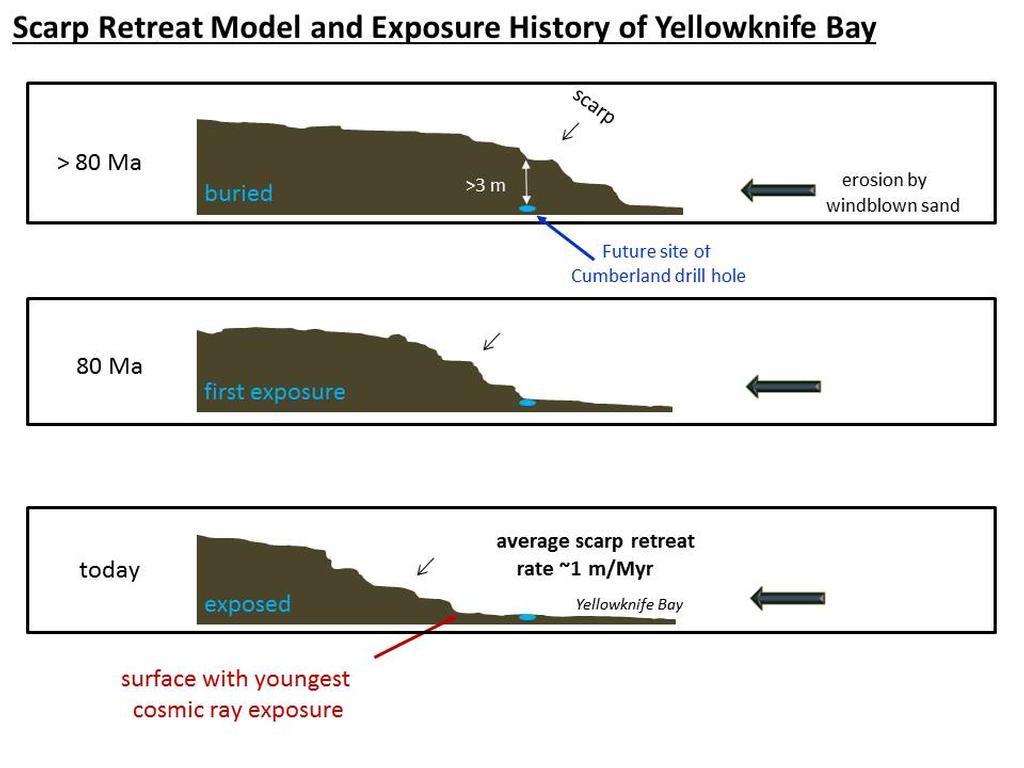
This set of drawings depicts cross sections of the “Yellowknife Bay” area of Mars’ Gale Crater at three points in time going back more than 80 million years (>80 Ma). Analysis of samples indicate the “Cumberland” rock target has been exposed at the surface for about 80 million years. Longer ago than that, the drill site was covered with about 10 feet (3 meters) of rock, as depicted in the top panel. At about 80 million years (middle panel), “Cumberland” was exposed as the scarp retreated due to abrasion by windblown sand. The sideways erosion, or retreat, occurred at an average rate of about one metre (3 feet) per million years (click to enlarge)
NASA’s Mars Science Laboratory (MSL) rover Curiosity chalked-up another milestone on October 30th, 2013, when the laser which comprises part of the Chemistry and Camera instrument (ChemCam) system mounted at the top of the rover’s mast, was fired for the 100,000 time.
The shot was one of a series of 300 fired at a total of 10 locations on a rock called “Ithaca”, and was taken at a range of 4.04 metres (just over 13 feet) from the target. The laser is used to vaporise tiny amounts of an object (the target area being around the size of a pin head), producing a spark of plasma (ionised gas). This spark is observed via a telescope which also forms a part of the ChemCam system, and the spectrum of light from the spark is analysed to identify chemicaal and mineral elements within it.
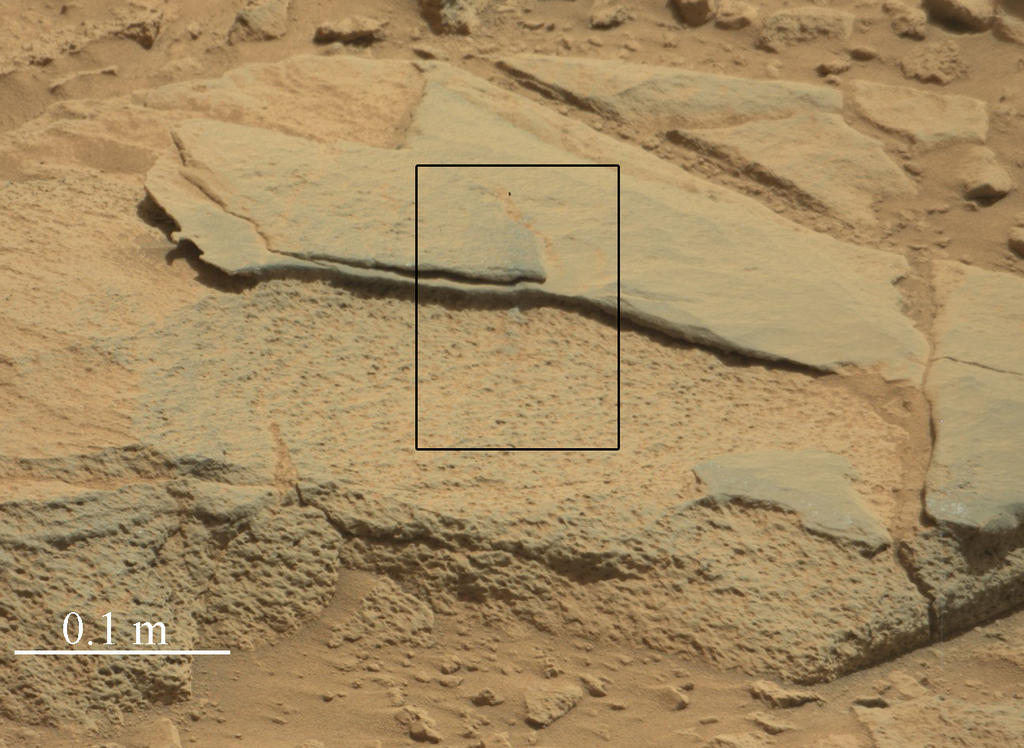
The rock “Ithaca” shown here, with a rougher lower texture and smoother texture on top, appears to be a piece of the local sedimentary bedrock protruding from the surrounding soil in Gale Crater. This image, taken by Curiosity’s Mast Camera (Mastcam), was captured on Sol 439 (October 30th, 2013). The rectangle indicates the area where ChemCam used its laser and remote micro-imager to inspect “Ithaca”. That inspection included the 100,000th laser shot fired by ChemCam on Mars
Each pulse from the laser delivers more than a million watts of power for about five one-billionths of a second. The technique used by ChemCam, called laser-induced breakdown spectroscopy, has been used to assess composition of targets in other extreme environments, such as inside nuclear reactors and on the sea floor. Experimental applications have included also environmental monitoring and cancer detection. MSL is the first mission to use the technique on another planet.
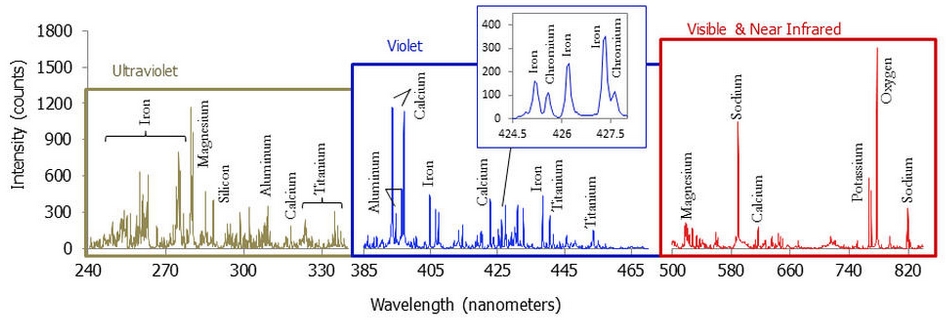
A graph showing a spectrum recorded by ChemCam which averages data from multiple laser firings at the same point on the rock “Ithaca” on Sol 439, and which included to 100,000th laser shot. The spectrum is typical of Martian volcanic (basalt) material. Although Ithaca is a sedimentary rock, the particles in the sediments that became the rock originated in igneous source rocks. The elements identified from the spectrum include a standard major-element suite of silicon, magnesium, aluminium, calcium, sodium, potassium, oxygen and titanium. Chromium and manganese, though not labelled, were also present (click to enlarge)
Virtually every shot taken by the laser yields a spectrum of data which is returned to Earth. Most targets get zapped at several points with 30 laser pulses at each point. An international team of scientists and students is mining information from ChemCam to document the diversity of materials on the surface of Gale Crater and the geological processes that formed them. The range of materials recorded so far includes dust, wind-blown soil, water-lain sediments derived from the crater rim, veins of sulphates and igneous rocks that may be ejecta from other parts of Mars.
Since reaching the 100,000 total in late October, the laser has been fired a further 2,000 times. ChemCam also includes a micro-imager camera, which has taken over 1600 images during the time the rover has been operating on Mars.
The ChemCam mast element on Curiosity
Four Billion Years
In a little more than a year on the Red Planet, Curiosity has determined the age of a Martian rock, found evidence the planet could have sustained microbial life, taken the first readings of radiation on the surface, and shown how natural erosion could reveal the building blocks of life. MSL team members presented these results and more from Curiosity in six papers published on December 9th, 2013 by Science Express and presented them in press briefings and talks at the Fall Meeting of the American Geophysical Union in San Francisco.
As a part of its operations, Curiosity has carried out a number of sample drillings into rocks on Mars. The second rock, dubbed “Cumberland” from which the rover obtained cuttings for analysis is now the first rock ever to be dated while sitting on another planet. Analysis of the mineral ingredients in the cuttings obtained from “Cumberland” estimates the age of the rock to be about 3.86 to 4.56 billion years; this matches estimates as to the overall age of Gale Crater itself, obtained through other means, which suggests that the techniques being used to analyse the samples gathered by the rover are reliable.
“The age is not surprising, but what is surprising is that this method worked using measurements performed on Mars,” Kenneth Farley, from the California Institute of Technology and a co-author of one of the new papers, said. “When you’re confirming a new methodology, you don’t want the first result to be something unexpected. Our understanding of the antiquity of the Martian surface seems to be right.”
Before they could measure rocks directly on Mars, scientists estimated their ages by counting and comparing the numbers of impact craters on various areas of the planet. The crater densities are correlated with ages based on comparisons with crater densities on the moon, which were tied to absolute dates after the Apollo lunar missions returned rocks to Earth.
The Cumberland sample analysis was a fundamental and unprecedented measurement which had been considered unlikely even as recently as the rover’s arrival on Mars in August 2012. To obtain it, Farley and his colleagues adapted a 60-year-old radiometric method for dating Earth rocks that measures the decay of an isotope of potassium as it slowly changes into argon, an inert gas. Argon escapes when a rock is melted. This dating method measures the amount of argon that accumulates when the rock hardens again.
The researchers also assessed how long Cumberland has been within about an arm’s reach of the Martian surface, where cosmic rays striking the atoms of the rock produce build-ups of gasses Curiosity can measure. The analysis of different gases present in the rock yielded exposure ages in the range of 60 million to 100 million years. This suggests shielding layers above the rock were stripped away relatively recently. Combined with clues of wind erosion Curiosity has observed, the exposure-age discovery points to a pattern of windblown sand eroding relatively thick layers of rock, which form a retreating vertical face, or scarp.
“The exposure rate is surprisingly fast,” Farley said. “The place where you’ll find the rocks with the youngest exposure age will be right next to the downwind scarps.”
It’s been an eventful week for Mars-related activities. After suffering a software reset on November 7th, as reported on in my last MSL update, the rover Curiosity experienced a second problem on November 17th.
This was caused by an unexpected voltage change being detected in the vehicle, described as a “soft” short, meaning that electricity is unexpectedly passing through something that is partially conductive, and in difference to a “hard” short, such as one electrical wire contacting another.
The short was first noted as a voltage difference between the chassis and the 32-volt power bus that distributes electricity to systems throughout the rover. Data indicating the change were received on Sunday November 17th, Curiosity’s 456th Martian day. Prior to the short occurring, the voltage level had been a consistent 11 volts; however, the data received indicated it has dropped to 4 volts.
While there was no immediate danger, as the rover’s electrical system is designed with the flexibility to work properly across a range of voltages – a design feature called “floating bus” – the decision was taken to suspend science operations while matters were investigated.
The Liberty 1909 penny mounted on Curiosity’s flank and used to calibrate the Mars Hand Lens Imager (MAHLI) mounted on the robot arm, as imaged on Sol 411 (October 2nd, 2013) at MAHLI’s highest resolution, some 14 micrometres per pixel. Note the dust and clumps of dust adhering to the coin despite it being vertically mounted on the rover
This was actually the second soft short Curiosity has experienced. The first occurred on the very day it arrived on Mars – August 5th/6th 2012 – when the bus-to-chassis voltage dropped from about 16 volts to about 11 volts. This was thought to be related to explosive-release devices used for deployments shortly before and after the landing, but did it not and has not interfered with the rover’s operational capacity or capabilities.
Although the voltage change did not pose any immediate threat, and the vehicle did not enter a safe mode status, nor was it related to the earlier software reset, such soft shorts can reduce the robustness of the rover’s electrical systems for tolerating other shorts in the future. Further, they can indicate a possible problem in whichever component is the site of the short. Hence the decision to suspend science operations and take time to check some of the possible root causes for the voltage change.
Subsequent analysis revealed that the voltage drop occurred intermittently three times in the hours before it became persistent. Some six days were spent in root cause analysis using data returned by the rover, which saw a number of potential causes suggested by mission engineers eliminated. This resulted in the most likely cause being identified as an internal short in Curiosity’s power source, the Multi-Mission Radioisotope Thermoelectric Generator (MMRTG or RTG for short).
Due to resiliency in the RTG design, this type of short does not affect operation of the power source or the rover. In fact, similar generators on other spacecraft, including NASA’s Cassini at Saturn, have experienced shorts with no loss of capability, and testing of an Earth-based RTG over many years found no loss of capability despite the presence of these types of internal shorts.
As a result of these findings, the rover was commanded to re-start science activities on November 23rd, and data returned from Curiosity’s onboard monitoring systems indicated that voltage levels had successfully returned to levels prior to that of the November 17th incident, a sign which is again indicative of an internal short within the RTG systems.
The resumption of science activities was marked by the rover delivering a further sample of rock cutting gathered some 6 months ago from an outcrop dubbed “Cumberland” in the “Yellowknife Bay” area of Gale Crater. A number of samples from the outcrop have already been analysed by the Sample Analysis at Mars (SAM) suite of instruments, which has the flexibility to be able to carry out such analyses a number of different ways, allowing significantly more data to be gathered on samples of the same rock gathered and stored by the rover.
 Last time around, I mentioned that the Curiosity team was looking at alternative routes to get the rover down to the crossing-point for the start of its explorations of “Mount Sharp” at the centre of Gale Crater and, more immediately, to a target of interest for further science studies.
Last time around, I mentioned that the Curiosity team was looking at alternative routes to get the rover down to the crossing-point for the start of its explorations of “Mount Sharp” at the centre of Gale Crater and, more immediately, to a target of interest for further science studies.