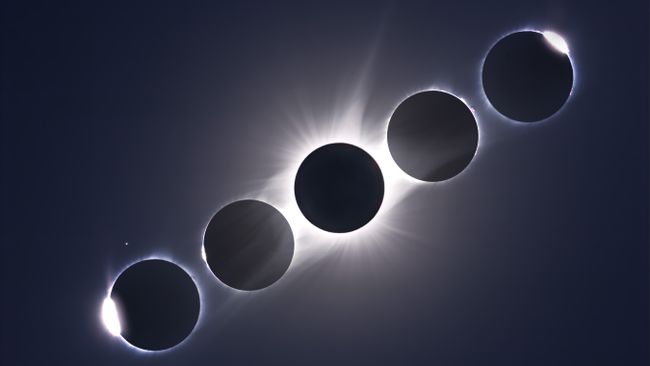
Total eclipse of the Sun. Credit: Alan Dyer/VW Pics/UIG via Getty Images
Monday April 8th 2024 marks 2024 only total solar eclipse of the year (and only one of two which might be witnessed during the year the other being an annular eclipse on October 2nd, 2024), with North America being treated to the spectacle.
A total eclipse is when the Moon crosses directly between Earth and the Sun in a manner which means it completely blocks the face of the Sun from view to those directly “under” the Moon’s path across the sky. This is the region known as the path of totality, marked by the Moon’s shadow marching its way across the face of the Earth as the Moon passes between planet and star. Within that path, the full light of the Sun is blocked for a brief period, plunging the land into twilight before the face of the Sun re-emerges from the limb of the Moon as the latter continued on in its orbit.
As I’ve mentioned before in these pages, a total solar eclipse is the most intense and fascinating of the various types of eclipse that can be observed from Earth, and they tend to occur roughly every 12-24 months, affecting different parts of the world depending on factors such as the Earth’s rotation at the time, the position of both the Sun and Moon relative to Earth, etc. Thus, not every total eclipse is necessarily so easily visible; the path of totality can often be in very remote places or over sparsely populated regions or even far out at sea.
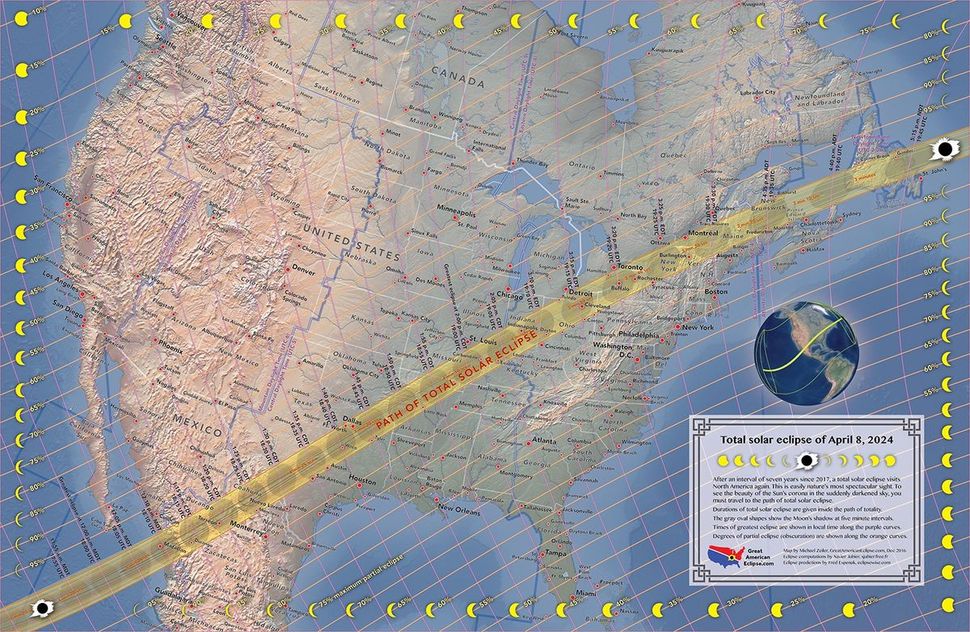
Track of the April 8th, 2024 total solar eclipse across North America, showing the main path of totality. Michael Zeiler/GreatAmericanEclipse.com
The event on April 8th 2024, however, is a little different. The 184-km wide path of totality will extend across 15 US states, whilst its ground track across North America will include Sinaloa, Durango and Coahuila in Mexico and Ontario, Quebec (where it will brush both Toronto and Montreal respectively), New Brunswick and sweep over the Labrador coast of Newfoundland close to St. Johns. This means it will be potentially visible (weather permitting) to around 32 million people in the US alone. What’s more, and in a rarity for total eclipses, it comes just seven years after the last total eclipse was visible from the continental United States (prior to that, the previous one to occur over the contiguous US was in 1979, and the next will not be until 2044).
Upcoming total solar eclipses and their visibility on Earth. Via timeanddate.com
If you are lucky enough to lie along the path of totality, and the weather is suitable for you to view it, please keep in mind these common sense guidelines:
Never look directly at the Sun – even with sunglasses or by using dark material such as a bin bag or photo negative; these filters do not protect your eyes against infrared radiation and can cause permanent eye damage.
Only look at the sun if you have certified eclipse glasses and are wearing them.
Only use a telescope or binoculars to project an image of the Sun onto white card, and never use either instrument to observe the Sun directly unless you have a certified solar filter fitted.
The best way to view an eclipse if you do not have eclipse glasses or have a telescope or binoculars to project the Sun’s image onto card, is via a pinhole camera:
Cut a hole in a piece of card.
Tape a piece of foil over the hole.
Poke a hole in the foil with a pin.
Place a second piece of card on the ground.
Hold the card with the foil above the piece of card on the floor to project an image of the Sun onto it, and look at the image. Do not use the pinhole to look directly at the Sun.
Eclipse Types (Moon and Sun not to scale). Credit: Cmglee
There are a number of terms common to eclipses which are worth mentioning for those who wish to follow the event, but are unfamiliar with the terminology. Specifically for a total eclipse these are:
The umbra, within which the object in this case, the Moon) completely covers the light source (in this case, the Sun’s photosphere).
The penumbra, within which the object is only partially in front of the light source.
Photosphere, the shiny layer of gas you see when you look at the sun.
Chromosphere, a reddish gaseous layer immediately above the photosphere of the sun that will peak out during the eclipse.
Corona, the light streams that surround the sun.
First contact, the time when an eclipse starts.
Second contact, the time when the total eclipse starts.
Third contact, the time when the total eclipse ends.
Fourth contact, the time at which the eclipse ends.
Bailey’s beads, the shimmering of bright specks seen immediately before the moon is about to block the sun.
Diamond ring, the last bit of sunlight you see right before totality. It looks like one bright spot (the diamond) and the corona (the ring).
Baily’s beads and the “diamond ring” effect seen during a solar eclipse on July 2, 2019 from the Cerro Tololo Inter-American Observatory in Chile. Credit: CTIO/NOIRLab/NSF/AURA/D. Munizaga
As noted, a total eclipse occurs when the observer is within the path of totality marked by the Moon’s shadow – which is formally called the umbra – passing along the surface of the Earth. For those in Mexico, much of the USA and Canada outside of the umbra, there is still the opportunity to see a partial solar eclipse if you are located within the penumbra.
If you are observing the eclipse (particularly along the line of totality), you might keep an eye out for some / all of the following:
If you look at the ground around you just before totality occurs and the Moon completely covers the disk of the Sun; you might see the phenomenon of fast-moving shadows, called shadow bands, racing across the ground under your feet. These might also occur as the Sun starts to re-emerge from behind the Moon.
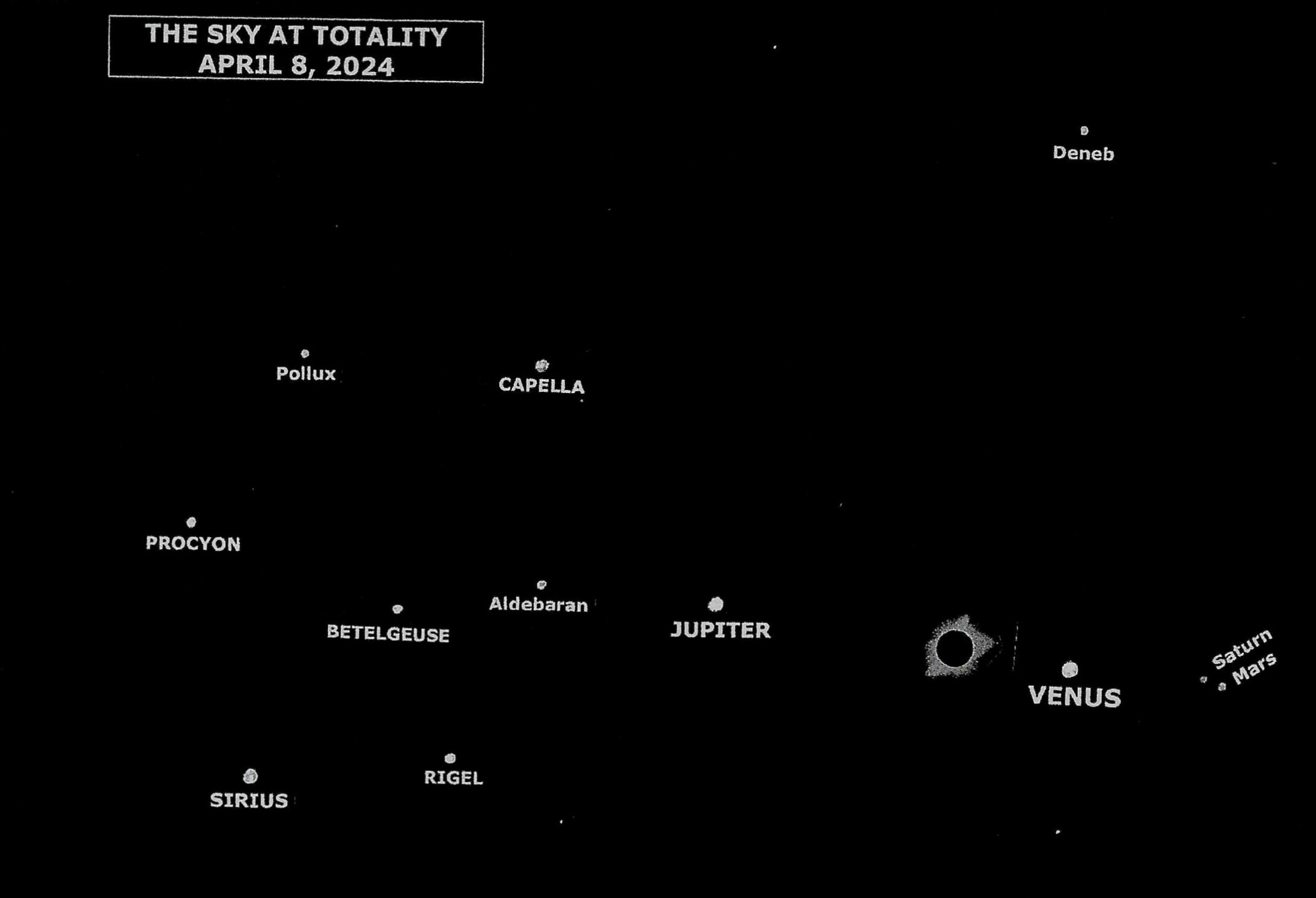
During totality, keep an eye out for the brighter stars becoming visible during totality, together with the following planets:
Jupiter: roughly 30o above and to the left of the Sun / Moon.
Venus roughly 15o below and to the right of the Sun / Moon.
Saturn and Mars (both very faint) roughly 20o below Venus, close to the horizon and further to the right.
The very keen eyed might also be able to spot comet 12P/Pons-Brooks as a fuzzy dot just off to the right of Jupiter (although you will need to be very keen-eyed!
Sky chart showing the most conspicuous stars and planets that might be visible in the vicinity of the totally eclipsed sun. Credit: Joe Rao
Watch and listen to the local animals and wildlife (if present). Birds may stop singing, with some flying to their roosts, cattle might behave is if it is evening , etc., as they become confused by the local twilight.
During the solar eclipse, you may see colours shifting, giving familiar objects unusual hues. This natural shift in colour perception is caused by fluctuating light levels resulting from the darkening of the sun.
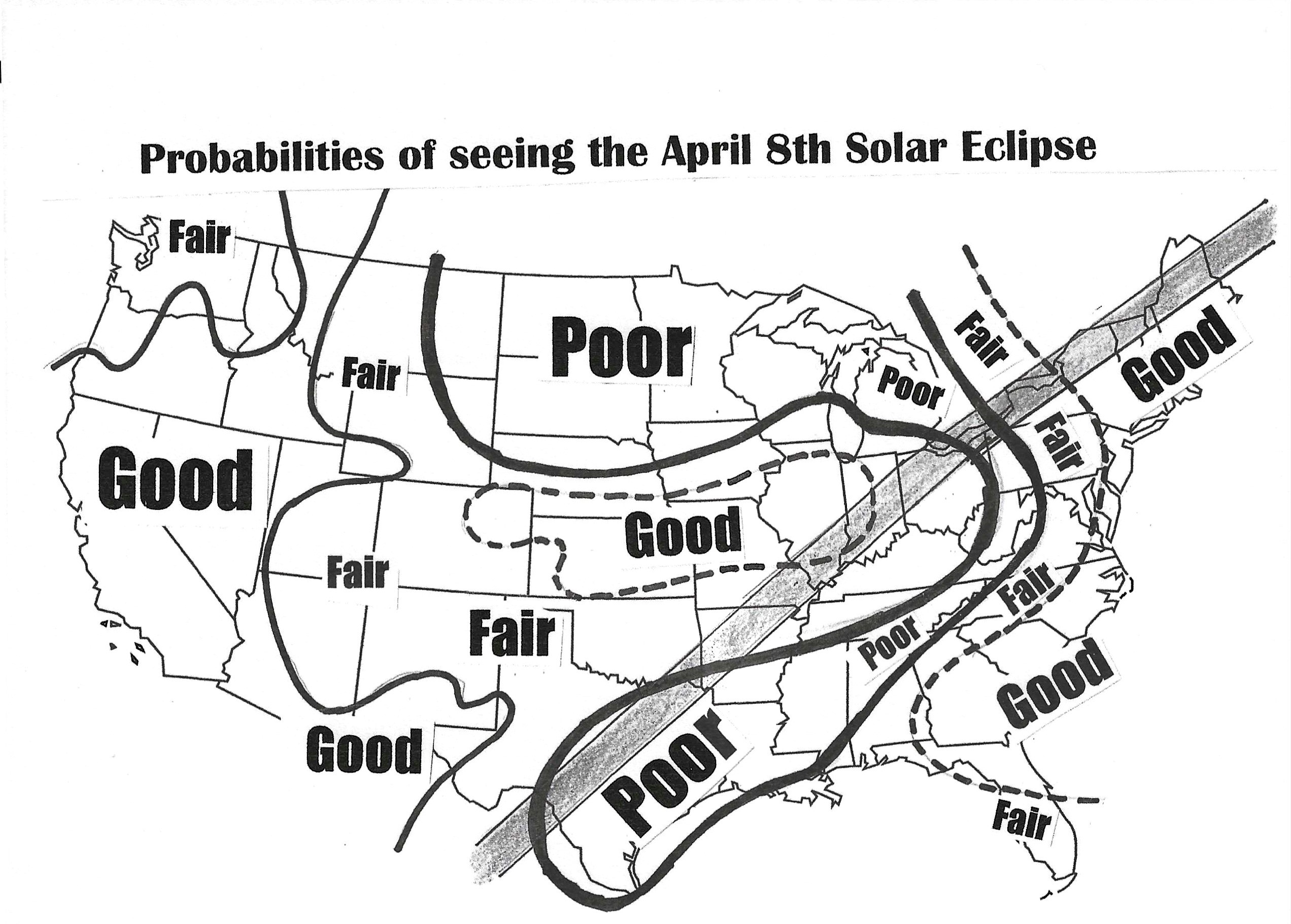
US Viewing probability map for the April 8th, 2024 total solar eclipse. Credit: Joe Rao
If you prefer not to watch the eclipse directly, or are not lucky enough to live along the path of totality (is the weather is pooping on you seeing it if you are), then it can be followed on-line at the following resources:
Plasma starts to form around the Starship’s thermal protection system as the vehicle starts to re-enter the denser part of Earth’s atmosphere, March 14th, 2024. Credit: SpaceX
Thursday, March 14th, 2024 saw SpaceX attempt the third Integrated Flight Test (IFT-3) of its massive Starship / Super Heavy launch system after the Federal Aviation Administration (FAA) granted a limited launch license to the company on March 13th.
Despite SpaceX and its followers hailing the first two launch attempts as “successes”, the short-order loss of both vehicles within 4 minutes of the launch of IFT-1 and which either vehicle achieving its core milestones in IFT-2, meant that both of those flights were extremely limited in their “success”. As a result of both, SpaceX spent considerable time reviewing the launch profile for the vehicles and making changes and improvement to both the Starship craft and Super Heavy. These resulted in IFT-3 being a broadly successful – although the loss of both vehicles at different points in the flight meant it was not an unqualified success.
Following lift-off at 13:25 UTC, with an initially perfect firing of all 33 Raptor engines on the booster, the stack of rocket and starship passed through Max-Q, the period where both experience maximum mechanical stresses as they ascend through the atmosphere, within the first minute of flight.
A clean burn: all 33 Raptors are at work as the IFT Starship / Super Heavy combination move towards Main Engine Cuto-Off (MECO). Credit: SpaceX
Even so, at 2:42 into the flight, the engines on the booster shut down and two seconds later, the starship upper stage ignited all six of its engines in a “hot staging” manoeuvre, separating from the booster after the engines had fired. This went a lot smoother than evidenced in the second launch attempt in November 2023, and the booster was this time able to change direction and execute an successful “boost back” burn – using the motors to kill its ascent velocity and push it back towards the launch site.
However, it was during the boost-back that possible hints of engine issues appeared: several of those recording and reporting on the launch noted that some of the engine exhaust plumes were tinged green, indicative of one or more engines consuming itself (green indicates the copper used in the engines is being consumed), a long-term issue with the Raptor 2. Nevertheless, the booster successfully re-oriented itself and started a planned engine-first descent towards the Gulf of Mexico and a splashdown.
For this to happen, the booster needed to slow itself by a further re-lighting several engines in a braking manoeuvre roughly a kilometres above the water. Whilst three engines did ignite, two immediately failed, and the vehicle was destroyed less than 500 metres above the Gulf – although it is not clear if the flight termination system was triggered or the booster blew itself apart. At the time of destruction, it was travelling with sufficient velocity to hit the water at 1,112 km/h.
A successful hot staging: with the super Heavy booster engines still glowing brightly, the Starship vehicle separates and moves away, the shockwaves of its exhaust ringing both vehicles after a successful engine start-up while still attached to the booster. Credit: SpaceX
Starship went on to achieve orbit, on course for a splashdown in the Indian Ocean. Travelling at around 240 km above the Earth, the vehicle carried out a test of the “Pez dispenser” payload bay door – a slot in the vehicle’s hull at the base of the payload bay and specifically designed to eject Starlink satellites (these being almost the only payload for Starship at present). Also tested was a so-called “propellant transfer” test, shunting a small amount of liquid oxygen between the vehicles’ main and header tanks.
However, SpaceX cancelled the vehicle’s planned de-orbit burn with one of its Raptor engines and instead allowed the vehicle to “go long”, continuing along its orbital track until gravity until drag caused it to re-enter the denser part of the atmosphere for a hoped-for splashdown. In the event, and following an initially very successful re-entry, the vehicle broke apart at an altitude of around 65 km.
The orbital flight segment of the test was impressive whilst also raising questions as to Starship’s future orbital flight dynamics. Notably, throughout its half orbit of the Earth, the Starship was in a state of continuous “bbq roll”, that is, spinning around its longitudinal axis (and making it seem like the Earth was constantly looping around it on videos). Such rolls are not uncommon on space vehicles when in sunlight, as they help spread the thermal load of the Sun’s heat over the vehicle’s outer skin, preventing uneven heating (or overheating).
In the first few seconds of flight: not the white ice enveloping the Super Heavy booster and the back of Starship -the result of the hulls of both forming the outer walls of their cryogenic tanks and being so cold frost ice forms on the metal, indicative of its poor thermal regulation. Credit: SpaceX
In this respect, Starship is especially vulnerable to such thermal stresses: it is completely reliant on cryogenic propellants which tend to revert to a gaseous state (and require venting to prevent tanks being over-stressed), and it is made of stainless steel, and extremely poor thermal insulator. This is compounded by the fact that the hull of the vehicle is also the the outer surface of the propellant tanks, so outside of the thermal protection system (TPS) tiles coating one side of the vehicle and designed to protect it during re-entry in to Earth’s atmosphere, there is next to no thermal insultation between the vehicle’s propellant reserved and the Sun, thus leaving rolling the vehicle as the simplest means of regulating internal temperatures.
Even so, the rate of roll, combined with its continuous does raise questions: was the rolling seen on this flight simply an overly precautious desire to limit thermal blooming inside the vehicle, or will it be part of starship SOP in the future. If the latter, then there are going to be some significant issues to address (how are to starships supposed to pump propellants being them in they have to roll like this once mated and the fuel to be transferred from one to the other is being exposed to a severe Coriolis effect as a result of the spin? Was the spin in this instance the cause of the planned de-orbit burn being cancelled because a smooth flow of propellants to the motor to be fired could not be guaranteed?
That said, the vehicle did perform its own mini “propellant transfer”, pumping a small amount of liquid oxygen between its own tanks. However, the overall value of this test is perhaps not as significant as some SpaceX fans have stated, given it is a long way short of the 100+ tonnes of propellants at a time that will need to be transferred between vehicles when it comes to sending the proposed Starship lunar lander to the Moon .
But leaving such thoughts aside, the one undoubted spectacular element in the flight were the initial phases of re-entry into the denser atmosphere, when cameras mounted on the vehicle’s control surfaces were able to video the build-up of super-heated plasma around the craft as it slammed into the atmosphere. While this has been filmed from within various space vehicles (Apollo, shuttle, etc.), this is the first time (I believe) it has ever been recorded from outside the vehicle going through re-entry.
Another unique element of the vehicle demonstrated prior to re-entry was the use of vented gas as a means of controlling the vehicle’s orientation. As noted above, cryogenic fuels tend to “boil off” and turn gaseous unless kept perfectly chilled. This gas must then be vented in order to prevent it becoming too voluminous and rupturing its containment tank (hence why rockets using cryogenic fuels are constantly venting gasses prior to launch following propellant loading & then having to be constantly “topped off”). However, rather than just letting go of this gas in space as they do on the ground, SpaceX channel it through a series of “cold thrusters” around the starship vehicle, enabling them to use the vented gas to “steer” the vehicle, avoiding the need for more traditional (and mass-using) thrusters systems requiring their own tanks of hypergolic propellants or gas.
While overall successful, the loss of both vehicles does mean a mishap investigation overseen by the FAA has been triggered, which may delay the planned launch of another test flight originally targeted for just a few weeks time. Even so, SpaceX are to be congratulated with the results overall, carrying the company as they do a modest step forward in the system’s development.
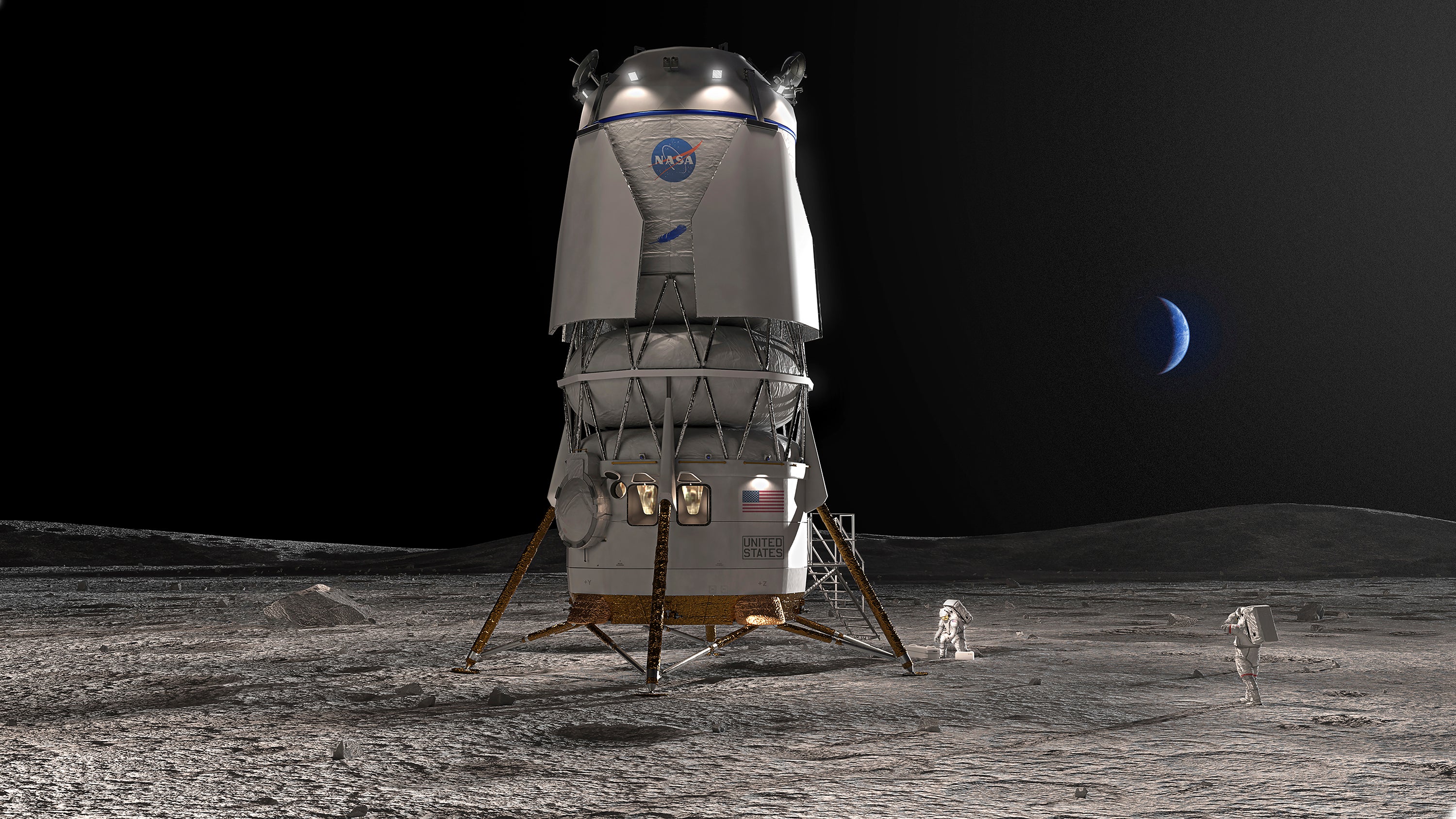
First to the Moon with Artemis: could Blue Origin (left) beat SpaceX (right) in delivering a US crew to the surface of the Moon this decade – and perhaps even eliminate SpaceX from the running? Credits: Blue Origin and SpaceX; images not to scale
The latest hype cycle about Elon Musk’s Starship / Super Heavy is starting to ramp in the lead-up to the next “integrated flight test” (IFT) of the system (SpaceX stopped calling them “orbital flight tests” aft the first one spectacularly firecrackered less than 4 minutes into the flight), and the second one fared somewhat better, prior to the booster and the starship both going the same way in separate explosions. As usual, the hype is being led by Elon Musk, stating that the third attempt could come on March 14th, 2024.
The Federal Aviation Administration (FAA) investigation into that mishap – actually led by SpaceX (as tend to generally be the case) – closed at the end of 2023; however, the closure did not mean SpaceX would be granted a license for resuming launches. That was dependent upon the company completing all identified remedial / corrective actions the FAA felt required in light of the mishap report. As of the end of February, 2024, it was not clear if all such action points had been addressed. However, SpaceX have renewed preparations for the next launch from the Starbase facility at Boca Chica, Texas.
If this third flight – regardless of when it takes place – does in fact deliver a starship test vehicle to orbit, it will be the first genuine success of the launch attempts thus far (whilst SpaceX fans might have lauded the first two attempts as successes, the fact remains that if ULA, NASA or any other company had seen their vehicles similarly destroyed, their flights would have been seen as abject failures), it is merely the smallest of steps SpaceX is committed to taking if it is to meet its obligations to NASA in providing the agency with a lunar lander vehicle in a timely manner – or at all.
As a quick recap: unlike Apollo, NASA is not relying solely on “in-house” designed hardware and systems for their return to the Moon, but are utilising private sector capabilities as well, theoretically on a fix-price basis. In particular, they have turned to the private sector for the development and operation of their Human Landing Systems (HLS) – that’s lunar landers to you and me.
Originally, two major teams of companies bid for the contracts for NASA’s first HLS systems, one led by Blue Origin (with Lockheed Martin) and one by Dynetics. SpaceX jumped into the proceedings very late in the process with a very questionable proposal to use a modified version of their Starship vehicle, and not only walked off with the contract under somewhat extraordinary decision-making at NASA, actually ended up as the sole contractor, despite NASA stating two contracts would be awarded.
Whilst one element of this 2021 graphic are outdated (the SpaceX Boca Chica facility very much does exist), the overall flight outline it presents is correct in terms of the number of flights required to get a single SpaceX Starship HLS to the Moon – as confirmed by NASA in November 2023. Credit: Blue Origin
That was in 2021. Since then, SpaceX has failed to achieve every single milestone Musk has set for Starship development, leaving a lot for the company to achieve if they are to meet NASA’s goal of delivering two people to the surface of the Moon and returning them safely to the surface of the Earth by late 2026 / early 2027. In particular, they need to not only get a Starship into orbit, they must:
Show they can launch a starship / super heavy combination not just once, but multiple times – and show they can actually capture them again on landing at the launch site without actually having them fall short or even crash into the launch / recovery tower.
Demonstrate this can be done over multiple launches in a relatively short time frame (e.g. at least once a day) without incident.
Develop, test and prove capabilities to deliver large payloads (100 tonnes) of cryogenic propellants to orbit and transfer them between craft with minimal boil-off, and again do so up to 14 or 15 times.
Carry out two demonstration flights of the HLS vehicle in orbit, one uncrewed and the other crewed.
Given the company’s rate of progress thus far, a 2 to 2.5 year time frame to complete all this is, frankly, liable to be well beyond SpaceX’s capabilities; particularly when you consider that in a Twitter Spaces meeting in December 2023, SpaceX personnel engaged in the HLS development programme admitted they hadn’t even started to conceptualise the crew facilities and support systems the vehicle must carry. Add to that the fact that the only actual hardware under development are both coming in part from NASA: the elevator needed to get the crew down and up the 30 metres of spacecraft and the lunar surface and the docking mechanism to allow the Orion crew vehicle to transfer crew from itself to the lander, once in lunar orbit.
And that’s not me saying it subjectively; Musk himself has stated Starship HLS will take around another 5 years to be realised. That’s 2029, and the time frame of the Artemis 5 mission. Hence why Jim Free, the man at NASA charged with overseeing the Artemis programme, is talking more and more robustly about bypassing SpaceX altogether in terms of that first crew landing. And there is a strong contender to take SpaceX’s place to take over the primary slot: Blue Origin.
Whilst smaller than the 40-tonne Blue Moon 2 crew lander, the Blue Moon 1 cargo vehicle will be capable of delivering up to 3 tonnes to the moon, and utilises the same propulsion unit (a single Blue Origin BE-7 engine as opposed to 3 on the crew lander), navigation, power systems and precision guidance and landing capabilities. Credit: Blue Origin
One of the original bidders for the first HLS contract, Blue Origin were awarded a contract to develop NASA’s “sustainable” lunar lander in May 2023 (the “sustainable” term a tacit admission by NASA that the SpaceX design, with its maximum 2 landing capability and the need for as many as 15 support launches to get it to the Moon is entirely unsustainable). Since then – and allowing for the fact they continued to develop their lander idea between 2021 and 2023 in the form of a cargo variant (“Blue Moon 1”) which shares several significant systems as the crewed lander proposal (“Blur Moon 2”), including navigation and landing systems, propulsion module / landing legs and power generation – the Blue Origin design is potentially far ahead of that of SpaceX.
Specifically, Blue Original have already delivered to NASA a walk-through mock-up on the lander’s pressurised module, allowing NASA engineers and astronauts to properly determine how the module should be laid out, workspaces and living areas be defined, and where and how all the required internal systems and services should be best installed.
In addition, the development of the cargo lander has reached a point where Blue Origin has announced it plans to send the lander to the Moon at its own expense, with the first taking place in 2025. Whilst these will deliver science payloads to the Moon, their primary goal will be to check-out those same navigation, propulsion, power and landing systems that will be used on the crewed lander, thus demonstrating their fitness for purpose (and flight readiness).
Given all this, and the pace of development at Blue Origin, it is possible their Blue Moon 2 lander system could be ready to fly in late 2027 – still outside of the NASA time frame, but likely well in advance of SpaceX’s HLS. This is something Free has openly acknowledged, expressing the point of view that if SpaceX isn’t ready, not only will they be held accountable for failing to meet their contract, the Artemis 5 mission featuring the first use of Blue Origin’s lander could be brought forward as the first Artemis crewed landing mission, and Artemis 3 shuffled back.
That said, the Blue Origin / Lockheed approach must clear some of the same hurdles as face by SpaceX in order to be able to perform crewed landing on the Moon. These include developing the means of transferring cryogenic propellants between spacecraft, and limiting propellant boil-off. However, the overall scale of operations is much smaller: Blue Origin and Locked are only dealing with tens of tonnes of propellant transferred in relatively small quantities (but stored in lunar orbit for a much longer period), rather than up to 1000-1200 tonnes for Starship HLS. This means that a Blue Origin lander only needs a single refuelling launch to see it through a number of lunar landings / lift-offs, not anything between 10 and 15 required by Starship HLS requires.
The Blue Origin / Lockheed approach to Artemis 5. Left: two New Glenn rockets place Lockheed’s cislunar transporter and a propellent carrier into LEO. After docking, the transporter pushes the carrier to a NRHO around the Moon. A third New Glenn launches the Blue Moon 2 lander (uncrewed) to NRHO, where it rendezvous with the transporter / carrier and takes on the fuel required to land on the Moon and lift off. Assuming Gateway station is operational, the lander docks there and waits a crew to arrive via Orion. Surface crew then use the lander to reach the Moon and return to Gateway (or dock directly with the Orion vehicle), returning to Earth in Orion. The lander performs an automated rendezvous with the transporter / propellant carrier and refuels, then awaits the next crew. The transporter can also return to Earth orbit to drop-off used tanks and pick up new ones. Credit: NASA / Blue Origin / Lockheed
Another critical aspect of the Blue Origin lunar capabilities is to enter service this year: the New Glenn rocket. Capable of delivering 45 tonnes to low Earth orbit and smaller payload out as far as Mars, New Glenn will enter service in August of this year, its maiden flight being to launch NASA’s EscaPADE spacecraft to Mars. With the lunar missions, it will be lifting the cislunar transporter (under development by Lockheed Martin) and the fuelling / refuelling tank the mission will require, as well as the lander itself. Providing there are no issues with the August 2024 launch, New Glenn should have an established track record by the time Artemis 5 is ready to fly.
This gives rise to the possibly that NASA might, if Blue Origin and their team are ready, simply drop the SpaceX option altogether. Why have a non-sustainable, complex lander system utilising a vehicle inherently unsuited to the task, when there is a sustainable, proven vehicle already doing the work? The issue here would be one of when such a decision should be taken. NASA has already contracted SpaceX to the tune of close to US $3 billion for Starship HLS – and has precious little to show for it; given the contract negotiated between SpaceX and a former NASA deputy administrator who might be said to have been overly biased towards SpaceX (the company now employing her as a senior executive), it is hard to know what, if any, penalty / get out clauses might have been written-in.
Blue Moon 2 will stand 16 metres tall – just under one-third the height of SpaceX Starship HLS, allowing the crew to reach the lunar surface without the need for complicated external elevators, as will as a much lower centre of mass for greater stability on landing. It will also be capable of supporting up to 4 people for 30 days at a time on the Moon. Credit: Blue Origin
That said, there are those – such as NASA’s own Office of Inspector General and the federal Government Accountability Office (GAO) – who feel that the Artemis programme is inherently too costly to be sustained beyond the currently defined missions (Artemis 3 through 9), and that it might be too costly to even go beyond Artemis 5 or 6. As such, a move to cut (and perhaps reclaim) costs associated with the system that is somewhat questionable in its ability to meet the requirements placed on it, and which could be redundant by the time it is ready, might go some way towards NASA demonstrating it really is trying to manage its costs effectively.
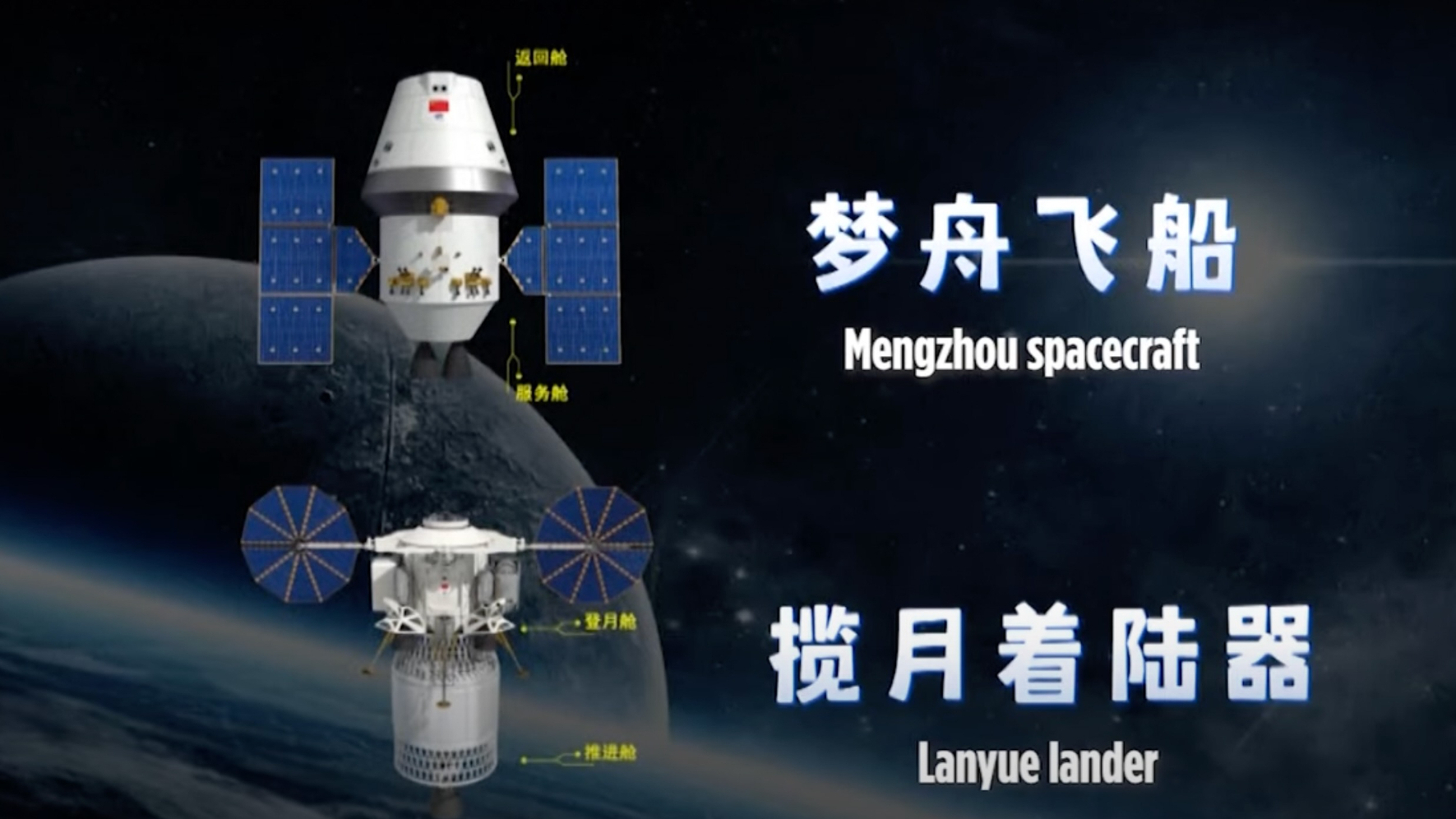
The February 24th, 2024, Chinese state media broadcast formally announcing the naming of the vehicle classes that will fly taikonauts to the Moon. Credit: CCTV
The China’s Manned Spaceflight Agency (CMSA) has revealed the names and preliminary drawings of the vehicles China plans to use to deliver its own astronauts – called taikonauts in Chinese – to the lunar South Polar Region.
For their human missions to the Moon, China is going the “easy” (that is, largely tested) way. No complicated drives to HALO orbits around the Moon and high-risk approaches such as 14 refuelling flights for the lunar lander after it has reached Earth orbit just so it can get to the Moon (yes, I’m looking at you, NASA – chuck the SpaceX idiocy, will you, please?). Instead, China is going a-la Apollo, using a two-ship system.
Chinese next-generation crewed spacecraft mock-up with its solar panels in the stowed launch position, displayed at the National Museum of China, September 2023. Credit: Shujianyang
The first of these has been in development for a while, and has been referred to in the past as China’s “next generation crewed spacecraft” designed to replace the Soyuz-inspired Shenzhou vehicle the country currently uses to reach low Earth orbit, as well as forming a basis for excursions further afield – such as to the Moon.
As announced by via Chinese state media on February 24th, 2024 during the Lantern Festival – the last day of traditional Chinese new year festivities and which takes place, appropriately enough during a full Moon -, the new class of crewed space vehicle will now be called Mengzhou (“Dream Vessel”). The name was selected after China held a national competition to name the programme, and is in keeping with the naming convention for its orbital classes of space vehicle (e.g. Shenzhou and Tianzhou).
Mengzhou is a two-stage craft comprising a useable capsule system capable of seating up to six taikonaut, and an expendable service module providing propulsion, power and life support. The vehicle’s overdesign is fairly advanced: a scale model version of the capsule was flown in space in 2016 on a mission designed to provide engineers with the data they required to finalise the capsule’s overall design and flight characteristics.
A second flight in 2020 using a full-scale proof-of-concept vehicle used to evaluate vehicle avionics, orbit performance, new heat shielding, parachute deployment and a cushioned airbag landing and recovery system. Currently, the first crewed test flight of the craft in either 2026 or 2027.
Four lunar missions, Mengzhou will fly with a crew of three and extended life support capabilities and additional supplies. It will be joined on missions by the Lanyue (“embracing the Moon”) lander. This again borrows somewhat from the Apollo missions of the late 1960s / early 1970s, being a spindly-legged craft built around a squat crew compartment supporting (initially) two taikonauts. Like the Apollo lunar lander, the craft is two staged; unlike the American lunar lander – which landed on the Moon fully intact, with the lower (“descent”) stage becoming a launch pad for the upper (“ascent”) stage for getting the crew back up to lunar orbit – Lanyue will use the same stage for both the landing and ascent phases of a mission.
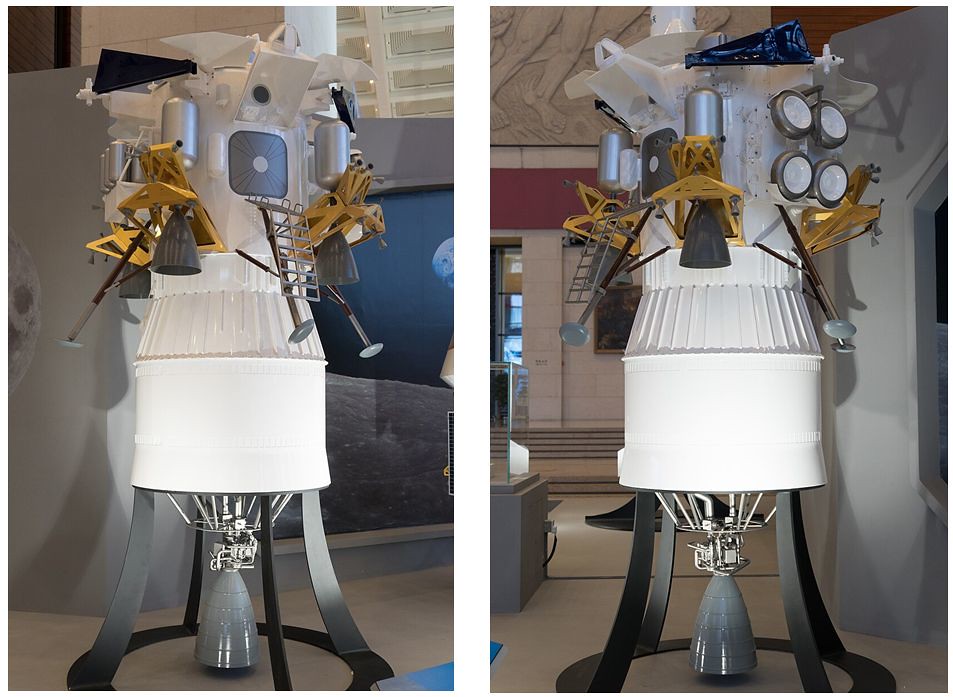
Two views of a mock-up of a Lanyue lunar lander (top) mated to its large propulsion module. The black panels at the top of the lander are its solar panels in their stowed configuration. Note the collapsed rover vehicle mounted on the lander in the right-hand picture. Credit: Shujianyang
The second stage of the vehicle will be a propulsion module which will power the lander to lunar orbit and then “park” it there. The crew will then travel to lunar orbit aboard a Mengzhou vehicle and dock with Lanyue. Two will transfer to the lander vehicle and undock to use the lander’s propulsion module to decelerate out of lunar orbit and into a descent towards the surface. Once the descent commences, the propulsion stage will be jettisoned to crash on the Moon, while the lander/ascent stage will continue on to a soft landing.
Information on how long a time the initial crews will spend on the Moon is unclear, as the details thus fair released are ambiguous in their interpretation. For example: the term “six hour stay” is used, but both in terms of the complete surface mission and in reference to crew EVA time. Most analysts in the west believe the first missions will equate to the stays of Apollo 11 and Apollo 12 – so “six hours” refers to actual EVA time -, with subsequent missions staying for increasingly extended periods, up to the limitations of the lander in terms of consumable supplies.
Artist’s illustration of a Chinese astronaut on the moon. Credit: CCTV
Plans for Lanyue include the provision of a collapsible rover vehicle of a similar nature to the Apollo Lunar Rover, and several models of the lander show the rover stored on its flank. However, it is not clear if it will be part of the first landing(s) or a subsequent addition to missions.
For lunar missions, both Mengzhou and Lanyue will be launched by China’s upcoming Heavy Lift Launch Vehicle (HLLV) Long March 10. Due to make a maiden flight possibly as early as the latter half 2025, this booster is an evolution of China’s Long March 5, and is slated to be able to deliver up to 70 tonnes to LEO or send up to 27 tonnes on its way to the Moon. As noted above, each lunar mission will comprise two Long March 10 launches, one for the lander vehicle and its propulsion module, and one for the crewed vehicle. In addition and when used on Earth orbital missions, elements of the Long March 10 might be evolved to be reusable.
Currently, China is looking at 2030 for their first crewed landing on the Moon, with subsequent mission intended to establish a research outpost in the lunar South Polar Region. From around 2034/35 onwards, China claims this outpost will be expanded into a permanently occupied base open to all countries joining its International Lunar Research Station Cooperation Organization (ILRSCO), seen as a direct alternative / “competitor” to the American-lead Artemis Programme.
One Lander Goes to Sleep, Another Unexpectedly Awakens
They are in many ways the joint tale of two lunar landers, both of which suffered mishaps as they arrived on the Moon, and both of which have nevertheless met the majority of their mission expectations.
Japan’s SLIM
On January 19th, 2024, the Japanese Smart Lander for Investigating Moon (SLIM – also called “Moon Sniper”) arrived on the lunar surface – upside down (see Space Sunday: a helicopter that could; a lander on its head). Despite this, the landing meant Japan had become only the fifth nation to successfully land a vehicle on the Moon after America, Russian and India, and the mission carried out most of its assigned science despite being inverted, prior to the long lunar night (14 terrestrial days long) settling over it.
Japan Aerospace Exploration Agency (JAXA) released this image, captured by the LEV-2 mini-rover, of their SLIM lander upside down on the Moon. Credit: JAXA
Lacking sunlight to provide energy for its batteries, the chances of SLIM making it through the long, cold night were low, but the mission team at JAXA, the Japan Aerospace Exploration Agency, powered-down the craft ahead of night arriving in the hopes its batteries might retain sufficient power to keep the electronics warm until the Sun rose over the landing site once more.
On February 25th, this optimism was rewarded: following sunrise over SLIM, the team were able to establish contact – albeit it intermittently. Attempts were then made to resume some of the lander’s science work, notably with the multiband spectroscopic camera (MBC). Unfortunately, these were unsuccessful, mission engineers believing MBC may have suffered damage as a result of the extreme low night-time temperatures.
Attempts to engage the system were abandoned on February 29th when, with night again approaching, SLIM was once again ordered to go to sleep in the hope its batteries will again see it through to the next lunar midday period in the latter part of March, when the sunlight will again be directly on its solar array.
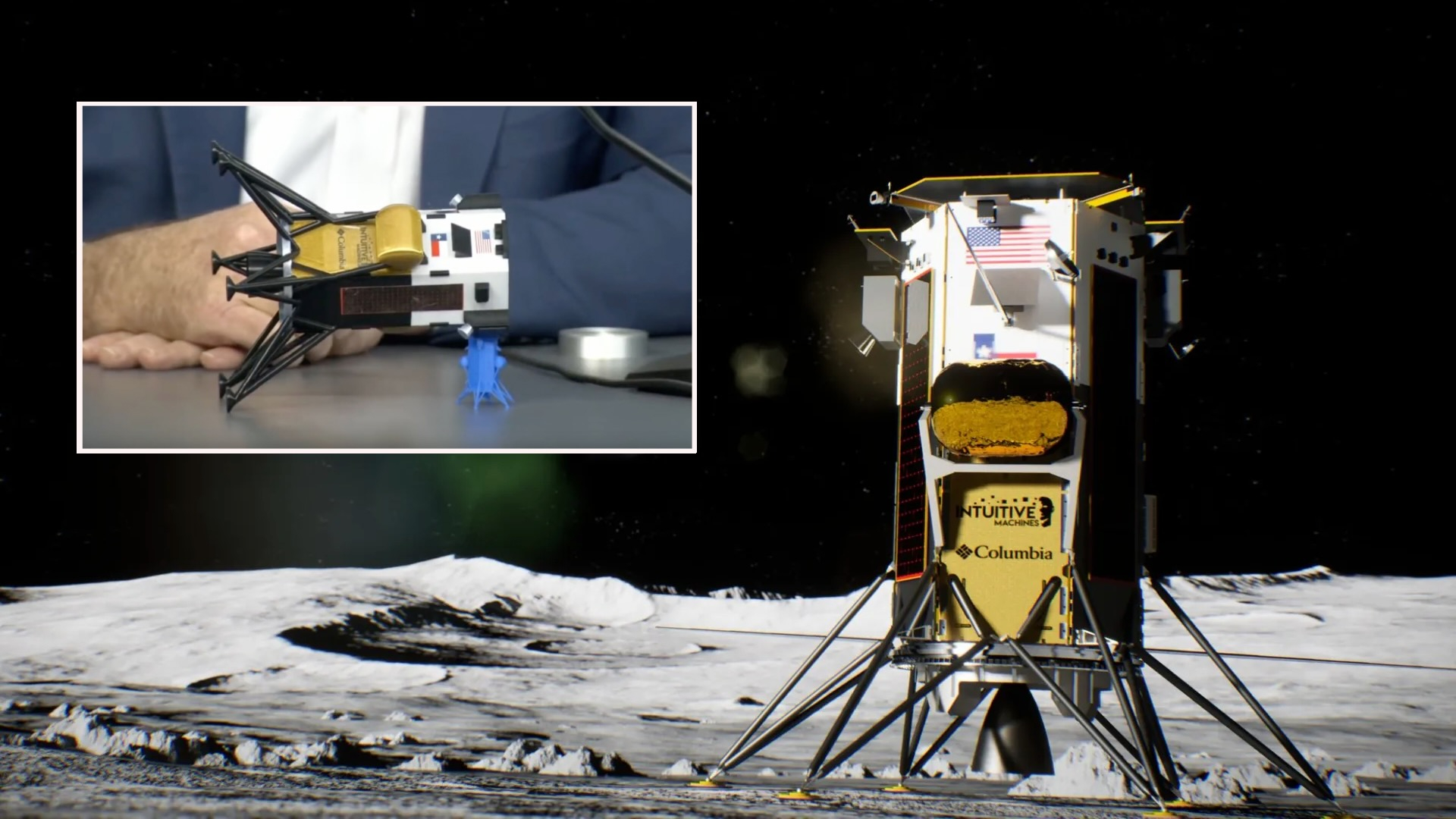
As it should have looked: an artist’s impression of the Intuitive Machine IM-1 Odysseus Nova-C lander on the surface of the Moon. Credit: Intuitive Machines / Columbia Sportswear
The second private mission to fly to the Moon under NASA’s Commercial Lunar Payload Services (CLPS) programme, and launched on February 15th, arrived on the lunar surface on February 22nd.
Following a successful launch, the mission – referred to as IM-1, for Intuitive Machines (the company that built the vehicle) mission 1, and the Nova-C lander itself christened Odysseus, had a slight wobbly start to its time in space after successfully being delivered into Earth orbit by a SpaceX Falcon 9 rocket.
Following its separation from the launch vehicle’s upper stage, the 675 kg Odysseus had been due to carry a “commissioning burn” of its main liquid methane / liquid oxygen (“methlox”) engine, firing it, then stopping it and then restarting it, a critical requirement of the motor if the lander was to enter lunar orbit and land. However, issues with the lander’s navigational star tracker and then with the liquid oxygen tank’s cooling lines meant the test had to be delayed until February 16th, when it was completed successfully, marking the first time a methlox propulsion system had ever been successfully re-started in space.
Intuitive Machines’ Nova-C lander Odysseus returned this selfie on Feb. 16th, 2024 as it orbited Earth in preparation for the commissioning test of its main motor. Credit: Intuitive Machines
Following its departure from Earth, the craft had been scheduled to make three trajectory adjustment manoeuvres whilst en route to the Moon, but only required the first two, such was the accuracy with which it matched its flight plan. On February 21st, the lander performed a Lunar Orbit Insert (LOI) manoeuvre, firing the main engine for 408 seconds to slow its velocity by 88 metres per second and place it in a 92 km orbit around the Moon.
After 24 hours in orbit, returning high-resolution images of the lunar surface to Earth, the vehicle was prepared to start its decent – and the mission hit another slight hiccup: a safety switch on the primary descent laser rangefinder had not been correctly set prior to launch, leaving the lander unable to accurately determine its distance from the Moon’s surface.
To compensate, the IM team worked with NASA to allow the latter’s experimental Navigation Doppler Lidar for Precise Velocity and Range Sensing system (called simply NDL to avoid a mouthful of an acronym) carried by the lander to take over the role of the laser rangefinder (and thereby also proving the NDL’s ability to guide a vehicle to a precise landing on another celestial body). This allowed the lander to commence its descent; unfortunately, it also meant that one of the other payloads on the lander had to be powered down.
Gazing at the Moon: Intuitive Machines’ Nova-C lander Odysseus catches a look at the Moon after entering lunar orbit, February 21st, 2024. Credit: Intuitive Machines
This was EagleCam, a small box of cameras developed by students and designed to be ejected from the lander when it was some 30 metres above the Moon in the hope that it would land ahead of Odysseus and provide the first-ever images of a space vehicle landing on the Moon. But the need to re-route power to NDL meant the ejection system for the camera had to be turned off.
Everything else with the descent seemed to go exactly as planned, and at 23:53 UTC on February 22nd, the lander settled on the Moon close to the crater Malapert A, about 300 km from the lunar south pole, only for another issue to occur: the mission team could not fully acquire the lander’s transmissions. After 15 minutes, it became apparent that whilst the vehicle was safely on the Moon, something was preventing it from sending a full-strength signal, leaving the mission team unable to lock-on to it. During the next several hours, the team worked to establish a firm contact with the lander – which they managed, to a degree – and obtain data on its approach and landing on the Moon, and general condition. The data received allowed them to reach a conclusion as to what had happened.
It had been thought that the 4.3 metre tall craft had made a proper vertical descent, slowing its horizontal speed to zero before lowering itself onto the Moon vertically at a rate of 3.6 km/h. But the telemetry finally obtained by the mission team revealed that at touchdown, the vehicle was vertically descending at close to 10 km/h, and moving horizontally at 3.2 km/h.
As it should have been compared to how it is believed to be (inset), as demonstrated by Intuitive Machines’ CEO Steve Altemus during a February 23rd media briefing. The small blue model of the lander represents the rock the lander is believed to be leaning against. Credit: NASA TV
This has led Intuitive Machines to conclude the lander was crabbbing sideways immediately before landing, rather than hovering in place, and one of the landing legs snagged on a rock or lip of a crevice, causing the vehicle to gently topple onto its side. Further data suggested that in toppling, Odysseus had ended-up leaning against a rock, allowing it to communicate, but with its antenna mis-aligned.
While communications had been stabilised, as of the time of writing the piece, it was unclear how many of the lander’s science packages would be able to function successfully. Even so, the landing is both a success – the first time an operational lunar lander built and operated by the private sector has landed on another celestial body, and the first time America has returned to the surface of the Moon since Gene Cernan and Harrison Schmitt departed on Apollo 17 in 1972 – and a warning.
Like the planned SpaceX Starship Human Landing System vehicle (HLS) intended to return humans to the lunar surface as a part of the Artemis Project, Odysseus is a tall, slim vehicle in terms of its overall proportions. Even with two extra landing legs compared to the SpaceX HLS (a altogether taller vehicle with a higher centre of mass), The IM-1 mission demonstrates how just a slight horizontal drift can be sufficient for such a vehicle to topple itself where a squatter, broader vehicle probably would not have done so.
Currently, IM-1 has sufficient sunlight to remain in operation through until the latter part of the coming week, after which the sun will set relative to its location on the Moon, depriving it of energy to power its battery systems.
Wooden Wonder
Want to have more eco-friendly satellites? Then why not make them out of … wood.
No, I’m not being sarcastic nor have I gone space happy. The above proposition was first put forward in 2019/2020 by a team of Japanese researchers at Kyoto University. It was born out of concern about the on-going practice of allowing / causing expired satellites to re-enter the upper atmosphere to burn up as a result of the frictional heat created by their passage through the atmosphere.
Whilst this generally results in the destruction of the greater portion of a lump of debris entering the atmosphere and helps reduce the dangerous clutter of junk whipping around the Earth, it is not entirely “clean”: every satellite or piece of rocket that burns up in this way leaves behind a trail of alumina particles which remain suspended in the atmosphere for decades. With the explosion of the private space sector and the growing use of “constellations” of thousands of low-orbiting, expendable satellites such as the (as of January 2024) 5,289 SpaceX Starlink network, these trails or clouds of alumina particles are set to increase exponentially, potentially having an undesirable impact on the upper reaches of the denser atmosphere and the environment as a whole.
So the researchers set out to find an alternative material for making satellites – and came to the conclusion that wood might be the best. Thus, the LignoStella Space Wood Project was born.
When you use wood on Earth, you have the problems of burning, rotting and deformation, but in space, you don’t have those problems: There is no oxygen in space, so it doesn’t burn, and no living creatures live in them, so they don’t rot. Some woods are extremely durable, so we set out to see if wood could be practically applied for use in small satellite systems.
– Koji Murata, LignoStella Space Wood Project
To test their ideas, the team examined various types of wood and determined three – Erman’s birch, Japanese cherry and magnolia bovate – had the precise properties required of a satellite body: they are lightweight, strong and durable. Just how durable was demonstrated when samples of the woods were flown to the International S[ace Station (ISS) in 2022 and exposed to the vacuum of space and the unfettered blasting of solar radiation for 290 days, being returned to Earth in mid 2023.
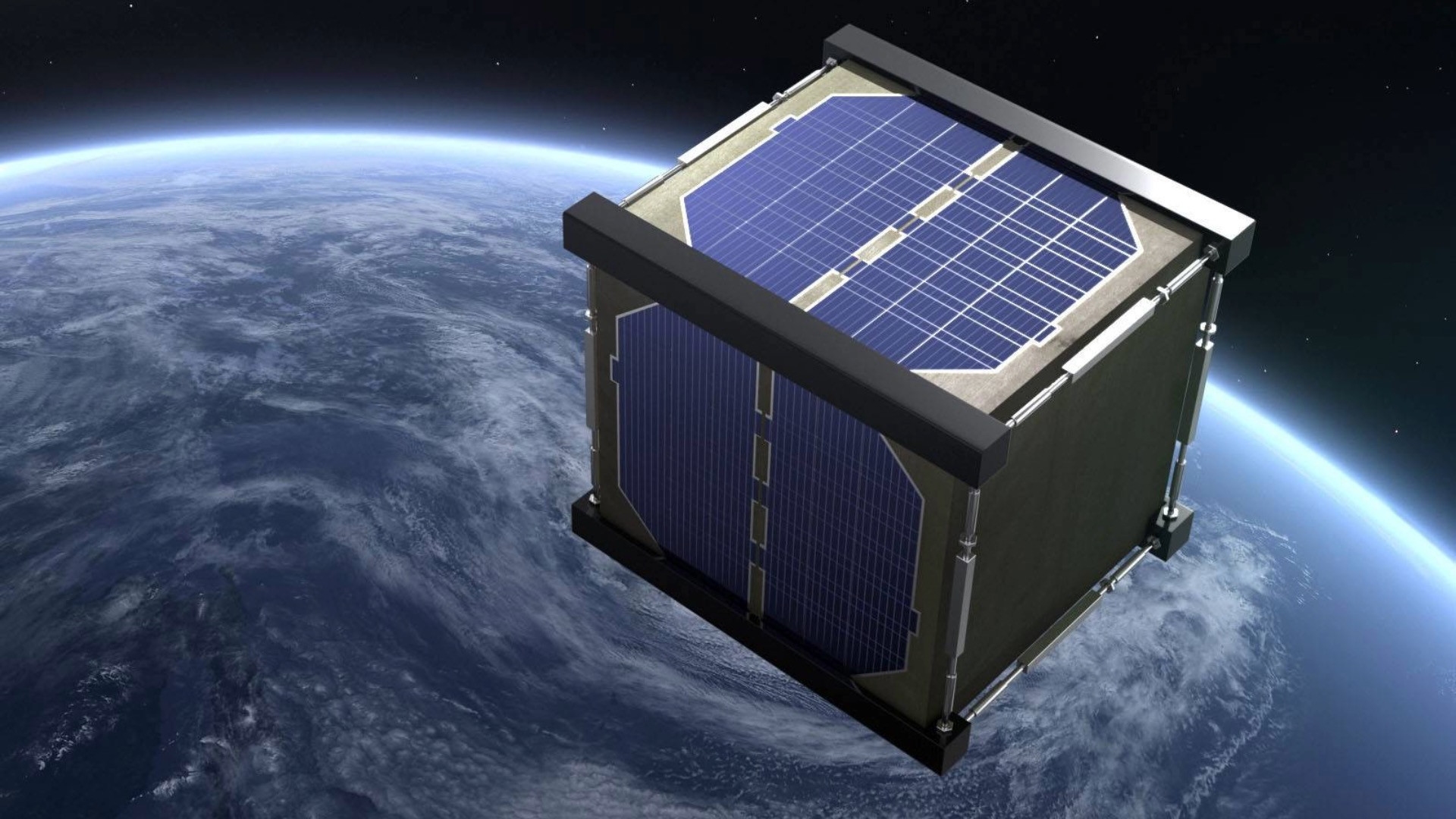
An artist’s depiction of LignoSat wooden satellite in orbit, with mini solar arrays mounted on its wooden surface. Credit: Kyoto University.
Analysis for the samples revealed that despite the harsh conditions to which they had been exposed, they had no measurable changes in mass and showed no signs of decomposition or damage. Meanwhile, tests of the woods on Earth indicated that of the three flown on the ISS, the magnolia wood – Hoonoki in Japanese – offers the best choice in terms of “workability, dimensional stability and overall strength” for use in a satellite design.
Now, and with the involvement of the Japanese Aerospace Exploration Agency (JAXA) and America’s NASA, the researcher are aiming to launch their first wooden satellite this coming summer. Currently, the plan is to carry it to orbit aboard an Orbital Sciences Cygnus automated resupply vehicle delivering supplies and equipment to the ISS. If all goes according to plan, the Cygnus vehicle will release the little satellite into its own orbit, where it will remain for 6 months.
LignoStella Space Wood Project’s Koji Murata with mock-ups of the LignoSat-2 satellite. Credit: Kyoto University
Called LignoSat-2, the vehicle is roughly the size of a cubesat – no more than 10cm on a side. Its primary purpose will be to test a number of factors in the use of wood which could dramatically change the design of such small satellites, which are growing increasingly popular in a growing number of roles. For example, wood can be penetrated by electromagnetic waves, so delicate and awkward elements of a satellite – sensors and antennae – could be mounted inside the satellite’s overall structure, helping to protect them whilst simplifying the overall design of the vehicle.
The overall durability of wood will also be monitored, as will be the eventual destruction of the satellite, the majority of which should burn-up “cleanly” in the atmosphere at the end of the mission, leaving only minute amounts of trace particulates.
One of the missions of the satellite is to measure the deformation of the wooden structure in space. Wood is durable and stable in one direction but may be prone to dimensional changes and cracking in the other direction.
– Koji Murata, LignoStella Space Wood Project
The LignoSat project is not the only team to consider the use of wood in satellites. Working entirely independently to them, a consortium of researchers and businesses out of Finland, supported by the European Space Agency (ESA) and Rocket Lab were developed a similar project with a cubesat built primarily out of plywood and called WISA Woodsat.
Heavily promoted and slated to fly in 2022, the project as (and still is) billed as the “world’s first wooden satellite”. However, since mid-2022 the project has been stalled, with no website updates or further information from ESA since April of that year.
Medical Crystals Grown in Space
One of the major promises of near-Earth space operations has long been that of leveraging the micro-gravity environment in the manufacture of ultra-pure drugs and the components used within them. Multiple experiments in this regard have been carried out over the decades, using facilities on space stations such as Mir and the ISS, or aboard the space shttle when it flew the European Spacelab, and so on.
Now a US company is looking to take matters a stage further – and have just successfully recovered their first attempt.
Touchdown: Varda Space’s off-Earth manufacturing capsule on the desert floor of the Utah Test and Training Range (UTTR) on Feb. 21st, 2024. Credit: Varda Space/John Kraus
Varda Space Industries is a relative new US start-up which has grand designs on microgravity manufacturing involving pharmaceuticals, fibre optics and computer chips. And they’ve moved fast. In 2021 the company purchased three Photon satellite buses from Rocket Lab to provide power, propulsion and navigation capabilities for the company’s “Winnebago” automated production satellites, the first of which – Winnebago-1 (W-1) – launched in June 2023, as a payload within a SpaceX Falcon 9 Transporter rideshare launch.
Originally, the craft was supposed to spend three months in orbit, growing exceptionally pure, “near-perfect” crystals used in an anti-viral medication called Ritonavir, a highly active antiretroviral therapy (HAART). The selection of a pharmaceutical product for the first Winnebago mission as this is seen as the largest market which might benefit from the benefits of microgravity production techniques. However, the capsule remained in orbit far longer than intended, thanks to the US Department of Defense (DOD), having originally agreed in principle to allowing Varda to use its Utah Test and Training Range (UTTR) as their landing site, withdrew that permission after the mission had been launched.
Thus began a multi-month series of negotiations involving the DOD, the Federal Aviation Administration (FAA), Varda and Rocket Lab to try and reach an agreement on the use of UTTR to recover the capsule. So protracted did this became that Varda, rather than lose their product, actually started looking at overseas recovery options such as the Koonnibba Test Range in Australia.
A Varda technician evaluated the company’s off-Earth manufacturing capsule prior to it being taken by helicopter to a receiving facility. Credit: Varda Space/John Kraus
On February 14th, however, the required agreement to use UTTR was reached and the FAA expedited granting Varda a licence to carry out a controlled re-entry into, and descent through, Earth’s atmosphere. As a result, on February 21st, 2024, Varda were finally able to bring their W-1 mission home on February 21st, 2024.
After the Photon buss had been used in a de-orbit manoeuvre, the capsule containing the automated manufacturing plant successfully re-entered the atmosphere and deployed its main parachute, touching down within the UTTR at 21:40 UTC in February 21st, marking the second time the range has been used for the recovery of space science capsules – the first being NASA’s OSIRIS-REx capsule, bringing samples from asteroid Bennu back to Earth for analysis.
Following touchdown, the capsule was subject to analysis and cooling prior to being harnessed to a helicopter for transfer to a Varda receiving station where it could be opened in suitable lab conditions, and the crystals produced initially assessed.
From there, the Ritonavir vials onboard the spacecraft will be shipped to our collaborators Improved Pharma for post-flight characterisation. Additionally, data collected throughout the entirety of the capsule’s flight — including a portion where we reached hypersonic speeds — will be shared with the Air Force and NASA under a contract Varda has with those agencies.
– Varda statement
No information has been given on the next Varda mission, called Winnebago-2, or its likely payload.
An artist’s rendering of the PACE Earth observation platform in orbit. Credit: NASA
On Thursday, February 10th, 2024, NASA launched a critical Earth observation satellite intended to study the world’s oceans and atmosphere in the face of increasing climate change.
PACE – the Plankton, Aerosol, Cloud, ocean Ecosystem remote sensing platform – is designed to operate in a geocentric, near-polar Sun-synchronous orbit, allowing it to observe all of Earth’s atmosphere and oceans over time. In doing so, it will study how the ocean and atmosphere exchange carbon dioxide and how microscopic particles (aerosols) in our atmosphere might fuel phytoplankton growth in the ocean. The data it accumulates will be used to identify the extent and duration of harmful algae blooms and extend NASA’s long-term observations of our changing climate.
Referred to as autotrophic (self-feeding), phytoplankton are present in both oceanic and freshwater ecosystems and play a key role in sustaining them – and in managing the planet’s carbon dioxide absorption and oxygen production. With the former, phytoplankton absorb carbon dioxide from the atmosphere and convert it into their cellular material, serving as the base of the global aquatic food web, a critical resource for countless species – including humans. In terms of the latter, phytoplankton are responsible for around half the planet’s natural oxygen production despite being around just 1% of the global plant biomass.
Phytoplankton can be imaged in a range of wavelengths (visible light, infra-red, ultraviolet, etc.), allowing colours to be used to assess their bloom size, drift, health, etc. In this 2016 image captured by the Visible Infrared Imaging Radiometer Suite (VIIRS) on the Suomi NPP satellite, the Southern Ocean phytoplankton bloom extending outwards from either side of the South American continent and down to the Antarctic Peninsula is clearly visible. Credit: NASA
Occupying the photic zone of oceans, where photosynthesis is possible, phytoplankton are crucially dependent on large quantities of nutrients, including nitrate, phosphate or silicic acid, iron, and also large amount of vitamin B. The availability of these nutrients is governed by a range of factors: the so-called ocean carbon biological pump; nutrients delivered into the photic zone via freshwater sources emptying into the oceans, natural organic decay, etc.
Both anthropogenic global warming and pollution are particularly harmful to phytoplankton; the former can lead to both changes in the vertical stratification of the water column and the supply of nutrients vital to phytoplankton. Similarly, increased acidity within ocean waters and currents can also adversely affect phytoplankton, up to an including causing biochemical and physical changes. In this, the colour changes exhibited by phytoplankton are considered important indicators of estuarine and coastal ecological condition and health.
Thus, the study of the global distribution and health of phytoplankton communities could profoundly advance our knowledge of the ocean’s role in the climate cycle, whilst at the same time providing real-time data on the negative effects of coastal and deep-water pollution and the impact of climate change and increasing temperatures on the world’s aquatic ecosystem.
A SpaceX Falcon 9 rocket lifts-off from Cape Canaveral Space Force Station, Florida, carrying NASA’ PACE platform up to orbit. Credit: SpaceX
In this, PACE will operate in unison with the French-American Surface Water and Ocean Topography (SWOT) mission. Launched in 2022, SWOT is designed to make the first global survey of the Earth’s surface water, to observe the fine details of the ocean surface topography, and to measure how terrestrial surface water bodies change over time to allow a more complete picture of the impact of anthropogenic global warming and pollution on the planet’s aquatic biodiversity and life-giving water cycle.
“Death Star” Moon’s Underground Ocean
We’re becoming increasingly familiar with the solar system being potentially full of so-called “water worlds” – bodies that may be home to vast subsurface oceans. Jupiter’s Europa and Saturn’s Enceladus are perhaps the most well-known, with both showing visible signs of water vapour escaping in geyser plumes through cracks in their surfaces. However, there are other bodies scattered around the solar system where water could be present beneath their surfaces, if not in liquid form, then at least in either a semi-liquid icy slush or solid ice.
Now a team of French-led scientists believe they have another candidate for holding a sub-surface ocean: Saturn’s moon Mimas.
Mimas, moon of Saturn, compared roughly to scale to the original Death Star and from a similar viewing angle, helping to show why it is often compared to the fictional battle station. Credit: Jason Major
This tiny moon – officially designated Saturn I – is the smallest astronomical body yet found in our solar system known to be roughly rounded in shape due to its own gravity. However, Mimas – with a mean diameter of 396.4 km – is perhaps most famous for resembling the fictional Death Stars of the Star Wars franchise. This is because one face of the moon is dominated by a huge, shallow impact crater 139 kilometres across, which has an almost sinister resemblance to the depression housing the primary weapon found on the fictional doomsday space vehicle.
Discovered in 1789 by William Herschel – after whom the distinctive crater is named – Mimas is responsible for one of the largest gaps in Saturn’s complex ring system, the Cassini Division, and had long be thought to be primarily made up of water ice rather than rock, simply because of its relatively low density (1.15 g/cm³).
However, the research team, using data gathered by the NASA / ESA Cassini mission which studied Saturn and its complex system of moons and rings between July 1st, 2004 and September 15th, 2017 (Space Sunday: Cassini – a journey’s end), believe that Mimas most likely has a watery ocean which exists at around the freezing point of water where it is closest to the moon’s surface, whilst potentially being several degrees warmer at the sea floor.
“That’s no moon… No, wait – yes it is!” – Mimas (lower left) shown to scale with the Moon (upper left) and Earth. Credit: unknown.
Building models to account for the moon’s mass and motion, and which also incorporate data on potential core warming and tidal flexing due to the influence of Saturn and other bodies orbiting the planet, the research team concluded that it is likely the ocean on Mimas accounts for around 50% of its total volume, and reach up to around 30 or 20 km below the moon’s crust. This would put the total amount of water within the moon at around 1.2%-1.4% that of all the Earth’s oceans; a not inconsiderable volume, given Mimas’ tiny size.
What has excited planetary astronomers the most, though, is the suggestion that this ocean might only be around 15 million years old – too young to have influenced the moon’s surface, but old enough that – assuming the conditions within it were right – it might actually be home to basic life still in the earliest stages of development; not that actually studying that life would be in any way easy (if at all possible). Even so, Mimas has possibly revealed that even the tiniest bodies in our solar system, if given the right circumstances, could be home to bodies of liquid water and perhaps to the basics of life.
Second CLPS Lunar Mission Set for Valentine’s Day Launch
The second private mission to fly to the Moon under NASA’s Commercial Lunar Payload Services (CLPS) programme is set to launch on February 14th, 2024.
The 675 kg IM-1 lander, also known as a Nova-C lander and christened Odysseus by its makers, has been built by Intuitive Machines, a Texas-based start-up. It had originally been scheduled to be the first lunar lander to be launched under the CLPS programme, in October 2021. However, a series of slippages – one of which one of the losing parties (Deep Space Systems) for the CLPS contract unsuccessfully challenging the US $77 million award – led to the mission being pushed back several times, enabling the recent Astrobotic Peregrine Mission One to claim the title of the first successful CLPS mission launch (January 8th, 2024 and the maiden flight of the ULA Vulcan Centaur rocket).
Intuitive Machines’ IM-1 lunar lander Odysseus undergoing testing. The vehicle is due to launch on February 14t, 2024. Credit: Intuitive Machines
Intuitive machines, who will be using a SpaceX Falcon 9 rocket as their launch vehicle, are hoping for a better result than that of Astrobotic – as I reported at the time, whilst the launch of the latter mission was successful, the lander suffered a malfunction and never reached the Moon, instead eventually re-entering Earth’s atmosphere and burning up.
Odysseus will be carrying 12 payloads to the Moon – six provided by NASA and 6 privately-funded. Included in the latter are sculptures by artist Jeff Koons entitled Moon Phases, and are tied to his first foray into the rabbit hole of NFTs (and in the process potentially furthering his critics’ view that his work could be considered little more than cynical self-merchandising). However, its sculptures will form the first set of sculptures to reach the Moon since 1971, when Apollo 15 astronaut David Scott placed the 9-cm tall Fallen Astronaut by Belgian artist Paul Van Hoeydonck on the Moon alongside a plaque commemorating the astronauts and cosmonauts who have lost their lives in space missions up until that time.
Also aboard the lander is a system called EagleCAM, a camera system designed to gain the first ever “third-person” images of a vehicle landing on the Moon. It will attempt to achieve this by being ejected from the lander when it is 30 metres above the lunar surface. Falling ahead of the lander, it is hoped EagleCAM will arrive on the Moon in such a way that one of his lens will be pointing at the landing site, allowing it to record Odysseus’ arrival. Any images it does capture will be transmitted to the lander via a wi-fi connection for transfer to Earth.
Thew utterly unassuming EagleCAM by Embry-Riddle University. Credit: ERU
The NASA instruments include a laser retro-reflector array (LRA), designed to provide precise measurements of the distance between the Earth and the Moon using lasers fired from Earth. Six LRAs were left on the Moon by the Apollo missions, and three more have been placed by the two Soviet Lunokhod rover missions of the 1970s, and one by the Indian Vikram lander in 2023.
The lander also carries the Lunar Node-1 (LN-1) prototype for a radio navigation system NASA hopes to utilise on the Moon for precise geolocation (or should that be selenolocation?) and navigation. The idea is that every unit on the Moon – base camps, rovers, astronauts, landers – and incoming vehicles – will have such beacons, and will be able to use the signals from multiple beacons to precisely confirm their position relative to one another. In theory, such a system would allow an automated lander make a precise landing wherever it was required, or allow two rovers to rendezvous with one another without the need for mission controller Earthside to direct them. LN-1 would therefore provide a local radio navigation system, one of several options for surface vehicle and lander navigation being investigated by NASA.
Following its launch at 05:57 UTC on February 14th, Odysseus will make a 5-day cruise to the Moon and has a provisional landing date of February 19th, 2024. It is due to land at Malapert A, an impact crater near the southern limb of the Moon and once on the surface, it is expected to operate for some 14 days – as long as the Sun is above the horizon to provide it with energy.
The total cost of the mission to NASA has been US $118 million, including some US $40 million towards launch and operation costs associated with the Falcon 9 rocket.
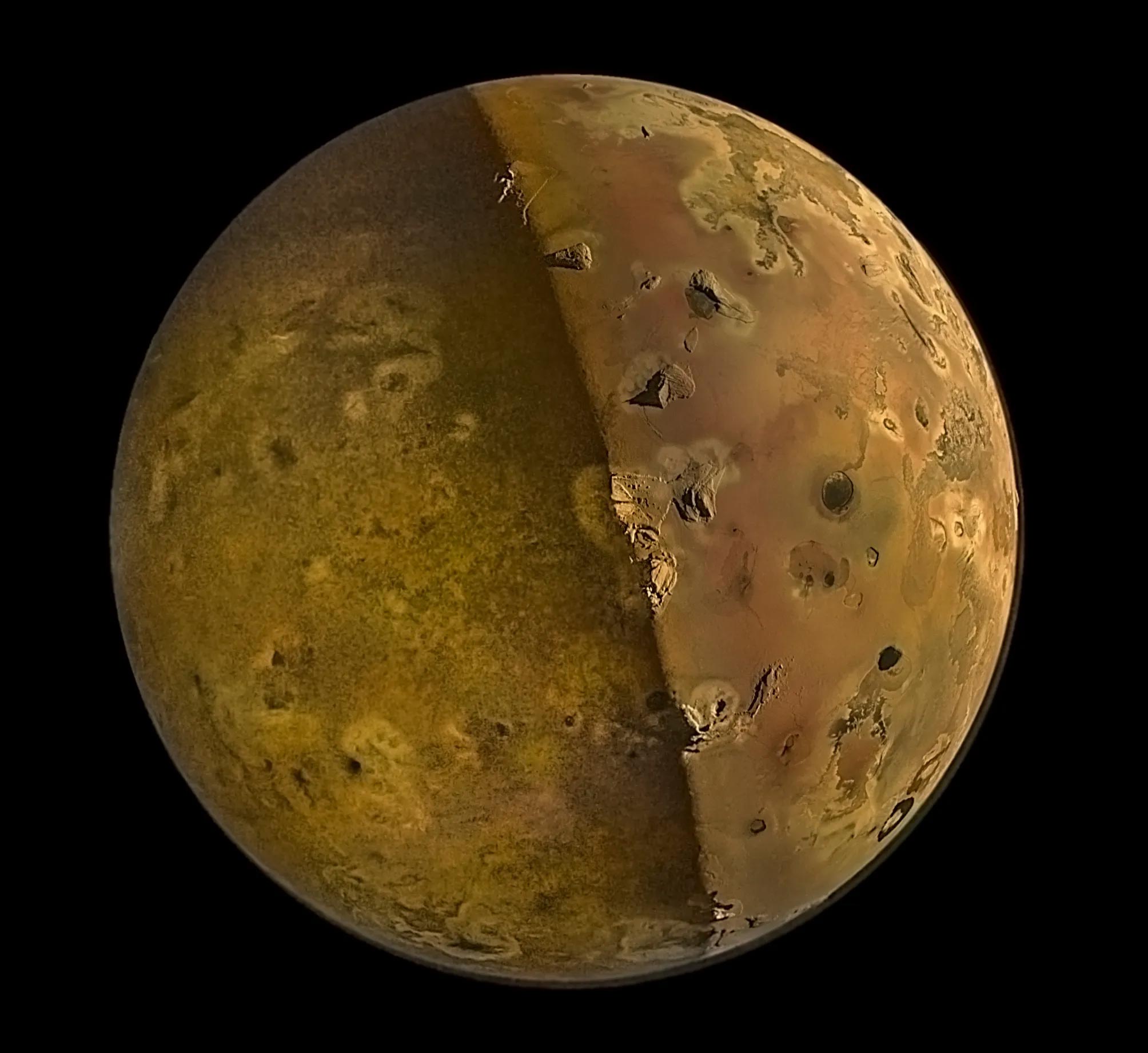
Welcome to Volcano Central: A Stunning View of Io
On December 30th, 2023, the NASA Juno spacecraft (of the mission of the same name), which has been orbiting Jupiter since July 2016, returning a huge amount of data and images of the solar system’s largest planet and its retinue of moons, made its closest approach to Io, the most volcanically active place in the solar system.
At that time, the orbiter passed over the north hemisphere of Io at a distance of 1,500 km. In February 2024, the spacecraft made a second pass over Io, this time over the moon’s southern hemisphere, and these two passes have allowed the production of the sharpest images of the moon ever seen to date.
At the innermost of the four large Galilean Moons of Jupiter, Io is very slightly larger than our Moon, and has the highest density of any moon in the solar system. With some 400 active volcanoes being recorded on its surface, it is not only the most volcanically active place in the solar system – it is the most geologically active, courtesy of its surface being almost constantly re-shaped by volcanic outflows.
The cause on all this volcanism is primarily because Io is constantly being tidally flexed: on the one side, it has massive Jupiter pulling away at it and its molten core. On the other, it has the three other Galilean moons, each of which exerts its own pull on Io, and all of which periodically combine their forces to counter Jupiter. In addition, Io sits well inside Jupiter’s immensely powerful magnetic field, which also imposes tidal forces on the moon’s core, further causing it to flex and generate heat and energy.
Jupiter’s moon Io, its night side (left) illuminated by reflected sunlight from Jupiter, or “Jupitershine.” Credits: original image data via NASA/JPL / MSSS. Image processing and image production: Emma Wälimäki
The images from the two recent passes over Io by Juno have been combined into a single true-colour mosaic, with the moon almost equally lit on two sides by direct sunlight and sunlight reflected onto it by Jupiter’s nearby bulk. The result is an image stunning in its clarity and depth of detail.
Many of Io’s volcanoes are visible, with at least one puffing out a plume of ejecta. On the sunward side of the moon (to the right) the light of the Sun is sufficient to reveal the moon’s hazy, mineral-rich atmosphere, whilst large parts of the surface appear bland and smooth due to the outflow of lava from multiple eruptions, and upon which volcanic island appear to be dotted.
A further impressive aspect of this image is that it was not created by NASA or anyone at Malin Space Science Systems (MSSS), who made and manage the mission’s JunoCAM imager. Instead, it was pieced together and processed by citizen-scientist Emma Wälimäki, using raw Juno images presented by NASA for public consumption, as a part of her involvement in the NASA citizen-science programme.

















:focal(400x267:401x268)/https://tf-cmsv2-smithsonianmag-media.s3.amazonaws.com/filer_public/6a/53/6a53ca5e-436e-4aae-91fc-2ffdb3bd420d/img_interview_murata_03_1.jpg)