The China’s Manned Spaceflight Agency (CMSA) has revealed the names and preliminary drawings of the vehicles China plans to use to deliver its own astronauts – called taikonauts in Chinese – to the lunar South Polar Region.
For their human missions to the Moon, China is going the “easy” (that is, largely tested) way. No complicated drives to HALO orbits around the Moon and high-risk approaches such as 14 refuelling flights for the lunar lander after it has reached Earth orbit just so it can get to the Moon (yes, I’m looking at you, NASA – chuck the SpaceX idiocy, will you, please?). Instead, China is going a-la Apollo, using a two-ship system.

The first of these has been in development for a while, and has been referred to in the past as China’s “next generation crewed spacecraft” designed to replace the Soyuz-inspired Shenzhou vehicle the country currently uses to reach low Earth orbit, as well as forming a basis for excursions further afield – such as to the Moon.
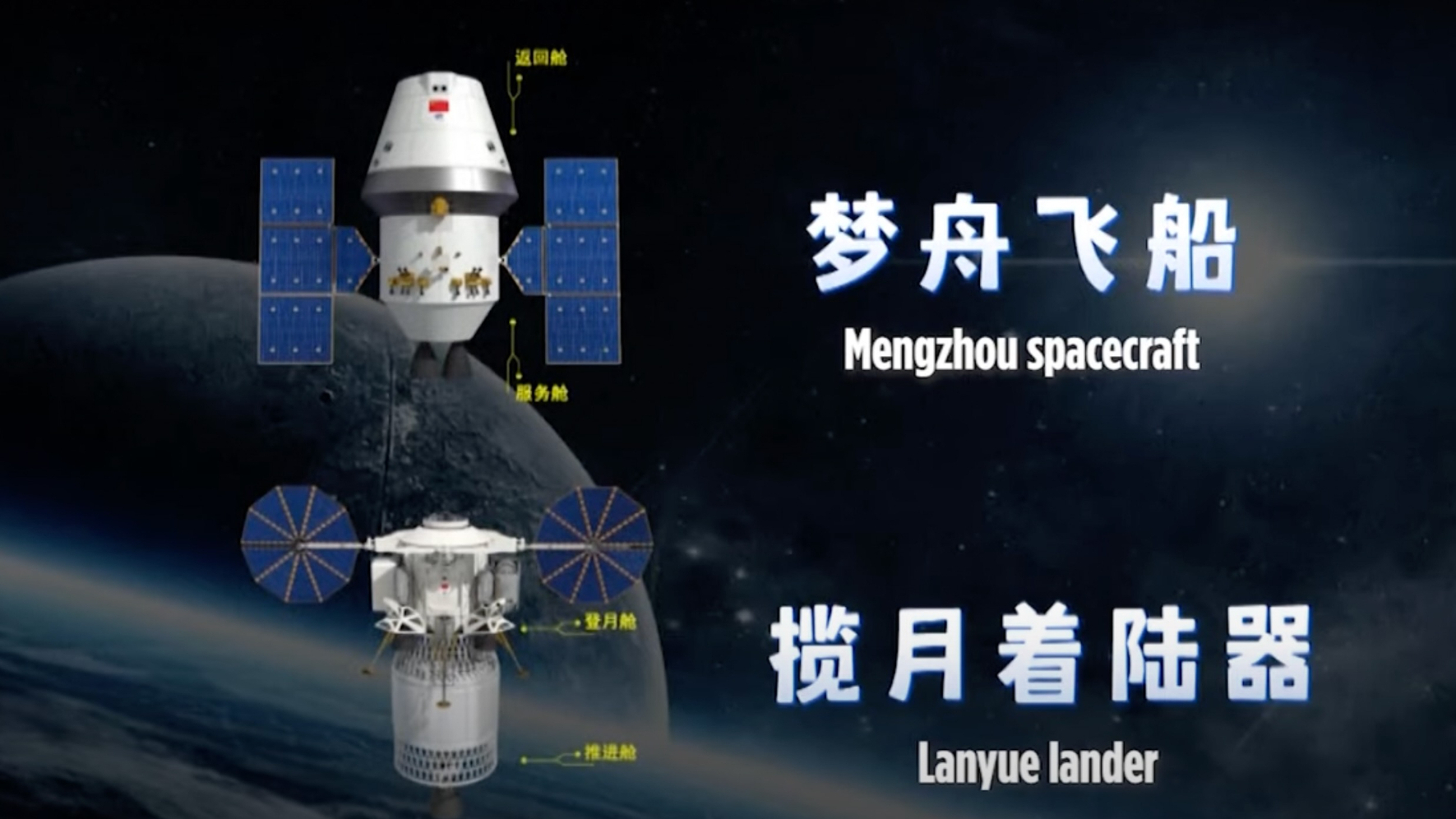
As announced by via Chinese state media on February 24th, 2024 during the Lantern Festival – the last day of traditional Chinese new year festivities and which takes place, appropriately enough during a full Moon -, the new class of crewed space vehicle will now be called Mengzhou (“Dream Vessel”). The name was selected after China held a national competition to name the programme, and is in keeping with the naming convention for its orbital classes of space vehicle (e.g. Shenzhou and Tianzhou).
Mengzhou is a two-stage craft comprising a useable capsule system capable of seating up to six taikonaut, and an expendable service module providing propulsion, power and life support. The vehicle’s overdesign is fairly advanced: a scale model version of the capsule was flown in space in 2016 on a mission designed to provide engineers with the data they required to finalise the capsule’s overall design and flight characteristics.
A second flight in 2020 using a full-scale proof-of-concept vehicle used to evaluate vehicle avionics, orbit performance, new heat shielding, parachute deployment and a cushioned airbag landing and recovery system. Currently, the first crewed test flight of the craft in either 2026 or 2027.
Four lunar missions, Mengzhou will fly with a crew of three and extended life support capabilities and additional supplies. It will be joined on missions by the Lanyue (“embracing the Moon”) lander. This again borrows somewhat from the Apollo missions of the late 1960s / early 1970s, being a spindly-legged craft built around a squat crew compartment supporting (initially) two taikonauts. Like the Apollo lunar lander, the craft is two staged; unlike the American lunar lander – which landed on the Moon fully intact, with the lower (“descent”) stage becoming a launch pad for the upper (“ascent”) stage for getting the crew back up to lunar orbit – Lanyue will use the same stage for both the landing and ascent phases of a mission.
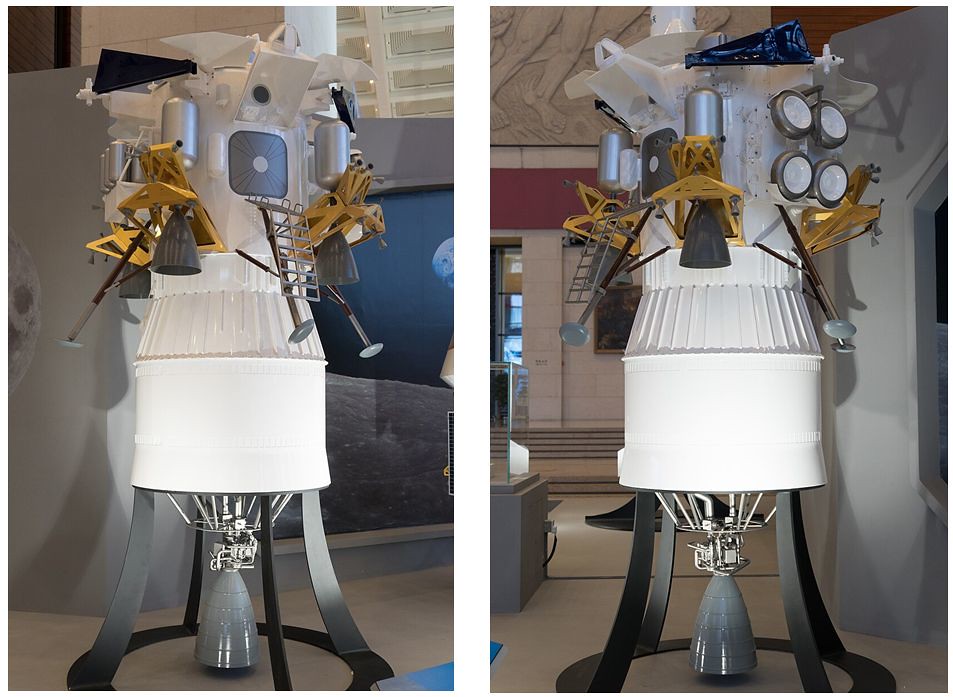
The second stage of the vehicle will be a propulsion module which will power the lander to lunar orbit and then “park” it there. The crew will then travel to lunar orbit aboard a Mengzhou vehicle and dock with Lanyue. Two will transfer to the lander vehicle and undock to use the lander’s propulsion module to decelerate out of lunar orbit and into a descent towards the surface. Once the descent commences, the propulsion stage will be jettisoned to crash on the Moon, while the lander/ascent stage will continue on to a soft landing.
Information on how long a time the initial crews will spend on the Moon is unclear, as the details thus fair released are ambiguous in their interpretation. For example: the term “six hour stay” is used, but both in terms of the complete surface mission and in reference to crew EVA time. Most analysts in the west believe the first missions will equate to the stays of Apollo 11 and Apollo 12 – so “six hours” refers to actual EVA time -, with subsequent missions staying for increasingly extended periods, up to the limitations of the lander in terms of consumable supplies.

Plans for Lanyue include the provision of a collapsible rover vehicle of a similar nature to the Apollo Lunar Rover, and several models of the lander show the rover stored on its flank. However, it is not clear if it will be part of the first landing(s) or a subsequent addition to missions.
For lunar missions, both Mengzhou and Lanyue will be launched by China’s upcoming Heavy Lift Launch Vehicle (HLLV) Long March 10. Due to make a maiden flight possibly as early as the latter half 2025, this booster is an evolution of China’s Long March 5, and is slated to be able to deliver up to 70 tonnes to LEO or send up to 27 tonnes on its way to the Moon. As noted above, each lunar mission will comprise two Long March 10 launches, one for the lander vehicle and its propulsion module, and one for the crewed vehicle. In addition and when used on Earth orbital missions, elements of the Long March 10 might be evolved to be reusable.
Currently, China is looking at 2030 for their first crewed landing on the Moon, with subsequent mission intended to establish a research outpost in the lunar South Polar Region. From around 2034/35 onwards, China claims this outpost will be expanded into a permanently occupied base open to all countries joining its International Lunar Research Station Cooperation Organization (ILRSCO), seen as a direct alternative / “competitor” to the American-lead Artemis Programme.
One Lander Goes to Sleep, Another Unexpectedly Awakens
They are in many ways the joint tale of two lunar landers, both of which suffered mishaps as they arrived on the Moon, and both of which have nevertheless met the majority of their mission expectations.
Japan’s SLIM
On January 19th, 2024, the Japanese Smart Lander for Investigating Moon (SLIM – also called “Moon Sniper”) arrived on the lunar surface – upside down (see Space Sunday: a helicopter that could; a lander on its head). Despite this, the landing meant Japan had become only the fifth nation to successfully land a vehicle on the Moon after America, Russian and India, and the mission carried out most of its assigned science despite being inverted, prior to the long lunar night (14 terrestrial days long) settling over it.

Lacking sunlight to provide energy for its batteries, the chances of SLIM making it through the long, cold night were low, but the mission team at JAXA, the Japan Aerospace Exploration Agency, powered-down the craft ahead of night arriving in the hopes its batteries might retain sufficient power to keep the electronics warm until the Sun rose over the landing site once more.
On February 25th, this optimism was rewarded: following sunrise over SLIM, the team were able to establish contact – albeit it intermittently. Attempts were then made to resume some of the lander’s science work, notably with the multiband spectroscopic camera (MBC). Unfortunately, these were unsuccessful, mission engineers believing MBC may have suffered damage as a result of the extreme low night-time temperatures.
Attempts to engage the system were abandoned on February 29th when, with night again approaching, SLIM was once again ordered to go to sleep in the hope its batteries will again see it through to the next lunar midday period in the latter part of March, when the sunlight will again be directly on its solar array.
IM-1 Odysseus
Meanwhile, America’s first private mission to the lunar surface, Intuitive Machine’s IM-1 mission, featuring the lander Odysseus also went through an unsettling landing on its arrival on the Moon on February 22nd, only to go on to complete most of its science objectives.

As I reported in Space Sunday: Lunar topples, space drugs and wooden satellites, it had been thought the lander had struck a rock or crevice edge on landing, breaking one of its landing legs and toppling over pretty much onto its side. However, a more detailed analysis of telemetry data, couple with images the craft has taken of itself on the Moon has revealed the land was far more complicated than first thought.
Within my previous article, I noted that the lander’s own descent laser rangefinder could not be powered-up as the craft was about to initiate its landing operations. The decision was therefore made to use a NASA proof-of-concept landing system called the Navigation Doppler Lidar for Precise Velocity and Range Sensing (NDL for short) to guide the vehicle in – and a hurried switch-over was made to enable this. As it turned out, NDL wasn’t calibrated to guide the lander all the way down to a landing.
This, coupled with the sloping nature of the terrain, meant that Odysseus came in to land somewhat faster than anticipated and not entirely sure where it was relative to the Moon’s surface. As a result, and in the words of an Intuitive Machines engineer, “consequently, we reached the surface of the Moon 100 metres early.”
Striking the Moon at over twice its intended landing velocity, the lander appears to have broken one or two of its landing legs and canted over by around 30º as a result.
Whilst rough, the landing did not prevent the lander for carrying out its mission, like SLIM, using the remaining sunlight of the local lunar day to keep itself powered. However, and again like SLIM, with night approaching, Odysseus was powered-down to go to sleep on Thursday, February 29th. Also like SLIM, Intuitive Machines hope they might be able to revive the lander as daylight returns to the region later in March.
We’re going to … kind of tuck Odie in for the cold night of the moon and see if we can’t wake him up here when we get a solar noon here in about three weeks.
– Intuitive Machines co-founder and CEO Steve Altemus
Ingenuity: Rotor Blade Shed in Final Flight
In February I covered the unfortunate grounding of NASA’s Mars helicopter Ingenuity, a part of the Mars 2020 robotic mission. After 72 flights on the red planet in which it both proved that rotary aircraft could fly on Mars and demonstrated the potential of rotary flying vehicles as an adjunct to other means of exploring the planet, the little helicopter suffered a mishap towards the end of what would become its last flight on January 18th, 2024.
At the time of my article on the success of the helicopter’s mission (see: Space Sunday: a helicopter that could; a lander on its head), I noted that the vehicle, whilst in one piece and on the ground, would not fly again because it had damaged one of its rotor blades. Now images returned of the craft by its companion, the rover Perseverance have revealed just how extensive the damage is.

Since the mishap which caused the damage, Perseverance had been manoeuvring to get a decent high resolution view of the helicopter, which is sitting in an area of sand dunes that might cause the rover some issues of its own were it to try from traverse them. At the same time, NASA carried out a series of rotor rotations on Ingenuity, using images of the helicopter’s shadow on the ground captured by its navigation camera to assess the extent of the damage to the rotor blade.
These were the first clues that Ingenuity had been subject to a far harder collision with the ground than had been thought: the shadows of the rotating rotors clearing showing that one of the two blades of the upper rotor had been sheared of very close to the mast, and the tips of the surviving blades had suffered a degree of clipping.

In mid-February, Perseverance was able to image Ingenuity and its surroundings using the high-resolution capabilities of the rover’s Mastcam-Z imager. These confirmed the helicopter to be upright on the slope of a sand dune, a pair of landing leg imprints just shy of the dune’s ridge indicative of it having bounced or been pushed on landing. However, the images confirmed one of the upper rotor’s blades was completely missing.
This sparked a survey across a much wider area of the dunes using both Mastcam-Z and the SuperCam also mounted on the rover’s mast. In particular, the latter was used to take overlapping images of the dune field as the mast rotated. Following transmission to Earth and processing, these images were released by NASA on February 24th, 2024, revealing the missing rotor had been flung some 15 metres south and west of Ingenuity, striking the sand once and skipping, before coming to rest.

It’s still not clear precisely what happened to the helicopter, but it has been suggested a failure in the rotor system just before landing at the end of its last flight caused the blade to sheer off, resulting in Ingenuity landing hard and off balance, the remaining blades briefly making contact with the dune, causing their tips to be clipped, as seen in some of the images the helicopter took of its own shadow, post-landing, and the helicopter to skip off the ground and land again.
One of the blades had actually suffered some deformation after the helicopter’s 71st flight, prompting the test flight in which the accident occurred, but at the time of writing, it is not clear if this deformation contributed directly to the loss of the rotor blade in question.

These images of Ingenuity are liable to be among the last Perseverance returns of the helicopter; unless plans change, the rover is due to continue on past the dunes as it makes its way to a point where it can use the ancient river outflow it is traversing as a means to drive up and out of Jezero Crater.
