Curiosity officially reached its next planned waypoint – dubbed “the Kimberley” on Wednesday April 2nd, 2014, with a final drive of some 30 metres (98 feet), after detouring from its planned drive route to reduce the amount of wear and tear being suffered by the rover’s aluminium wheels, the result of traversing some particularly rough terrain for several months.
“The Kimberley” was identified from orbit in 2013 as a possible location of interest during the rover’s drive down towards the point at which it will start its explorations of the lower slopes of “Mount Sharp”. It is an area of four distinguishable rock types exposed close together in a decipherable geological relationship to each other. As such, they should provide further clues about ancient environments that may have been favourable for life.
A mosaic of “The Kimberley” created by images taken by Curiosity’s Navcam on Sol 589 (April 2nd, 2013), at the conclusion of the rover’s final drive to reach the waypoint. The outcrop at the center of the image is a category that the rover team scientists call “striated,” from its appearance in images taken from orbit before the rover reached this area. Farther in the distance, the striated type is overlain by other types. On the horizon, slopes of Mount Sharp – the mission’s long-term destination – are on the left and the rim of Gale Crater is on the right (click to enlarge)
As a major waypoint, “the Kimberley” will form an extended stopover for Curiosity which, while unlikely to be as long as the 6 months the rover spent exploring and examining “Glenelg” and “Yellowknife Bay”, will still be in the order of several weeks. The first part of this work is study the area in more detail, and the location occupied by the rover and the end of its April 2nd drive – Sol 589 for the mission – is ideal for this. A slight rise compared to the surrounding terrain, it provides an excellent vantage point from which the rover can survey its surroundings, allowing mission scientists to comprehensively review the area and plan the coming science programme in finer detail than can be achieved when using orbital images alone. The science work is expected to involve observation of the surrounding region, sample-gathering from the rock formations, and onboard analysis of the samples gathered.
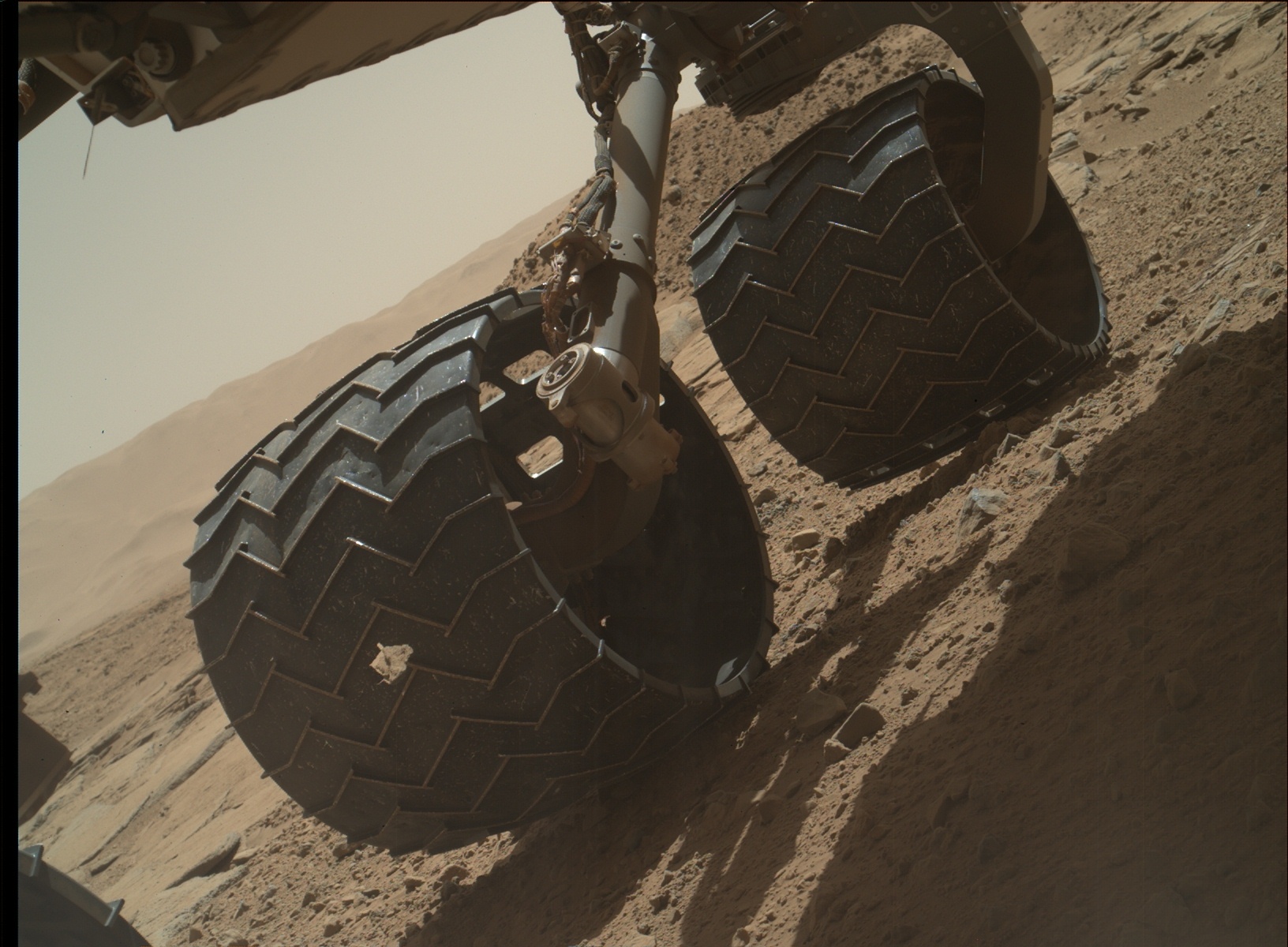
As I’ve previously reported, a cause of concern for mission personnel of late has been the amount of wear and tear the rover’s six aluminium wheels have suffered during the drive south from “Yellowknife Bay”. While the matter is far from serious in terms of impeding the rover’s manoeuvring or driving capabilities, with Curiosity’s nuclear battery offering the chance for a mission as much as 20 years in duration barring unforeseen circumstances, and what might provide to be a punishing climb up into the slopes of “Mount Sharp” still to come, the rover was directed onto less harsh terrain – comparatively speaking – in February 2014. Since then the mission team have been periodically checking on the wheels for further signs of damage and, as I noted last time around, the wear on the wheels is now around a tenth of that which had been experienced prior to the diversion. Nevertheless checks are still being carried out – including during the period in which this report was being written, as demonstrated by the raw image below, taken directly from the NASA image archive for Curiosity.
An image of one set of Curiosity’s rear wheels captured by the Mars Hand Lens Imager (MAHLI), located on the turret at the end of the rover’s robotic arm, on Sol 595 (April 9th, 2014). Note the jagged hole punched through the 40-cm (16-in) wheel (the rounded holes visible on the far side of the wheel are not signs of damage, but a part o the morse code for “JPL” deliberately cut-in to the wheels to help measure wheel rotation and slippage. This is a raw image, as posted by NASA on receipt from Curiosity, and without any white-balance post-processing (click for full size)
It’s been a quiet time for the last three weeks as far as news from NASA’s Mars Science Laboratory is concerned. There have been a couple of reasons for this.
The primary reason is that the rover is on a slow but steady drive towards its next intended science waypoint while en route to the lower slopes of “Mount Sharp”. At the start of February, that waypoint had been around half a kilometre from the rover. However, concerns over the amount of wear and tear being suffered by the rover’s wheels as a result of traversing very rough terrain meant that Curiositytook a diversion.
While this put the rover on much smoother – comparatively speaking – terrain, it also meant the route to the waypoint had become more circuitous, requiring Curiosity cover around a kilometre in order to reach its intended stopover. In addition, engineers have been periodically checking the amount of damage to the wheel which may be accruing, further slowing daily progress, as well as continuing to test alternative driving methods to further ease the load on the wheels – such as letting the rover drive backwards towards its destination. However, the good news is that in the month since crossing Dingo Gap on February 18th, wear on Curiosity’s wheels has been around one-tenth what had been experienced per month during the months traversing the rougher terrain.
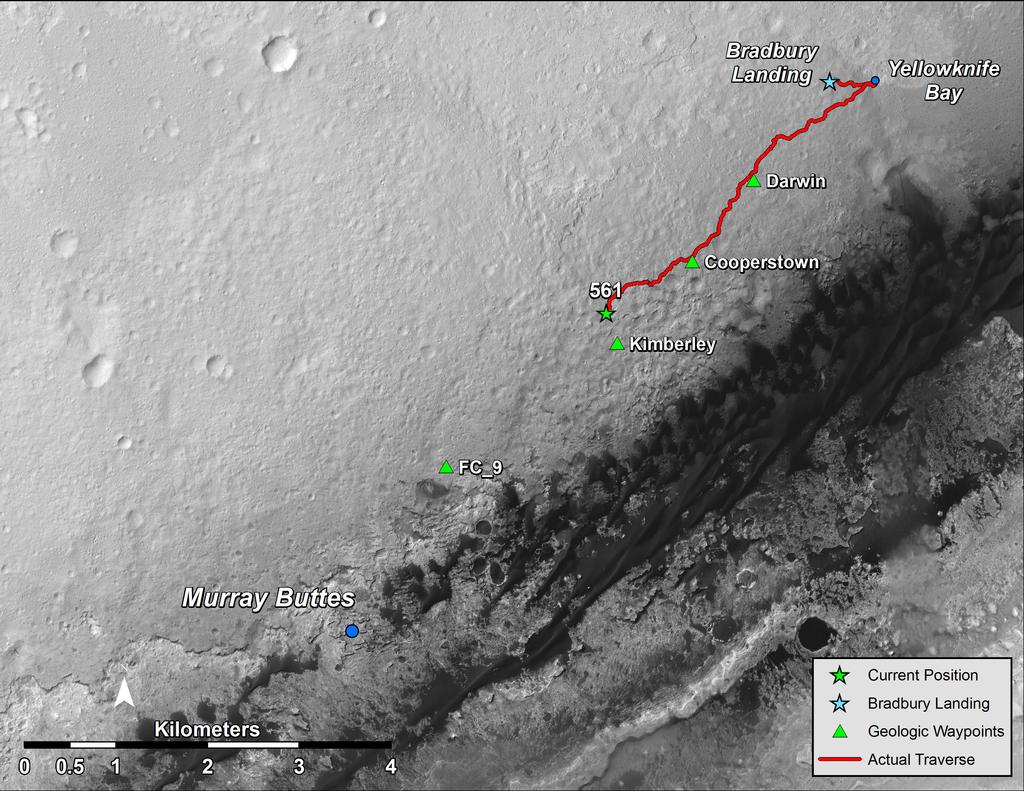
The long drive south. Murray Buttes mark the point at which Curiosity is expected to start the traverse onto the lower slopes of “Mount Sharp”, which forms a natural break in a line of dark sand dunes between the rover and the mound. “Kimberley” marks the next stop on the way (click for full size)
Additional tests using Curiosity’s test bed “twin” on Earth have revealed that the rover could sustain substantially more damage than incurred so far, including breaks in the wheel treads themselves, and still remain operational. However, given the potential duration of the mission – Curiosity’s nuclear “battery” could provide it with an operational life measured in a couple of decades barring other failures – means caution is key at this stage of the mission.
“The wheel damage rate appears to have levelled off, thanks to a combination of route selection and careful driving,” said JPL’s Richard Rainen, mechanical engineering team leader for Curiosity. “We’re optimistic that we’re doing OK now, though we know there will be challenging terrain to cross in the future.”
MRO Computer Glitch
The other break in news, although brief in nature, was caused by an unexpected issue with Curiosity’s primary communications relay between itself and Earth – the Mars Reconnaissance Orbiter (MRO) unexpectedly switched itself into a “safe” operating mode on Sunday March 9th. This immediately brought a cessation in the orbiter’s communications relay function for both Curiosity and Opportunity on the surface of the planet, although it did not put either rover entirely out of communications with Earth.
An artist’s impression of the Mars Reconnaissance Orbiter orbiting the planet
While MRO forms the primary means of communications between the surface of Mars and mission control at NASA’s Jet Propulsion Laboratory facility at the California Institute of Technology, the rovers on Mars can also use NASA’s Mars Odyssey as a relay – and, should it be required, Europe’s Mars Express. However, Mars Odyssey, which has been operating around Mars for almost twelve and a half years, has much lower bandwidth and data transmission rates compared to MRO, which reduces the amount of information which can be relayed to Earth at any given time.
MRO’s issue first became apparent on March 9th, when the orbiter performed an unplanned swap between its duplicate computer systems. This is the prescribed response by a spacecraft when it detects conditions outside the range of normal expectations; the safe mode is initiated to reduce the risk of whatever caused the out-of-range event from being repeated by the second computer and potentially permanently harming the vehicle while matters are investigated. MRO has experienced unplanned computer swaps triggering safe-mode entry four times previously, most recently in November 2011, the root cause of which still hasn’t been clearly determined.
The March 9th safe mode entry also included a swap to a redundant radio transponder on the orbiter, marking the first time this has happened during the vehicle’s eight years in orbit around Mars. Whether or not the transponder issue triggered the computer swap-out is unclear. However, after carrying out a series of diagnostics on MRO from Earth, the mission team began bringing the orbiter back-up to full operational capabilities on March 11th, leaving it operating on the computer the swap-out switched to, together with the previously redundant radio transponder.
“The spacecraft is healthy, in communication and fully powered,” Mars Reconnaissance Orbiter Project Manager Dan Johnston said on March 11th. “We have stepped up the communication data rate, and we plan to have the spacecraft back to full operations within a few days.”
Charting a New Frost Channel
Since that event, MRO mission scientists have released a photo comparison showing the active nature of the Martian environment. The image shows two pictures of the same slope in the wall of crater Terra Sirenum, located in the southern highlands of Mars. There were captured some two and a half years apart (roughly equivalent to 1.2 Martian years), in November 2010 and May 2013 respectively.
Side-by-side: an image of Terra Sirenum crater walls taken in November 2010 compared with an image of the same region taken in May 2013, complete with freshly carved gully and outflow fan (light areas)
The right-hand (May 2013) clearly shows the creation of a new gully down the inner wall of the crater, created when material flowing down the older channel broke out to form a new channel and corresponding fantail deposit. While the material responsible for the new gully was liquid in nature, as the event occurred in the Martian winter period in the southern hemisphere, it is believed that carbon dioxide ice, and not water, played the major role in forming the new channel.
NASA had previously experimented with dry ice to see if it could be responsible for such gullies, with interesting results.
Curiosity is once more moving forwards – by going backwards.
Since crossing the “Dingo Gap” sand dune, the rover has been on terrain dubbed “Moonlight Valley” which is far smoother than has been encountered in recent travels, exactly as the mission team would hope would be the case. Nevertheless, precautionary measures are still being used to offer Curiosity’s aluminium wheels some additional relief after a routine inspection of them revealed some had suffered much greater wear and tear than had been anticipated crossing some very rugged terrain.
While the damage to the wheels is not an immediate threat to the rover, mission planners were aware it could happen, and so have been considering various alternatives to minimise further undue wear. One of these alternatives involves the rover proceeding by driving backwards.
A white-balanced look back at the “Dingo Gap” sand dune Curiosity drove over on February 9th (Sol 538) to reach smoother driving terrain. For scale, the distance between the parallel wheel tracks is about 2.7 metres (9 feet) across (click to enlarge)
Theoretically, the design of the rover means that it can make forward progress either by driving with its front end (mounting the robot arm and science turret), or with its rear end, the large RTG cooling system, facing the direction of travel. However, the technique has never been fully tested on Mars, only having being tried over any significant distance using Curiosity’s Earth-based test bed twin; but with much smoother terrain now before the rover, mission managers were eager to discover how well Curiosity could drive when travelling backwards.
“We wanted to have backwards driving in our validated toolkit because there will be parts of our route that will be more challenging,” said mission Project Manager Jim Erickson at NASA’s Jet Propulsion Laboratory, Pasadena, California. To this end, on Tuesday February 18th, Sol 647 of the mission, Curiosity covered just over 100 metres (329 feet) whilst driving backwards, a traverse which was also the first long trek the rover has made in more than three months, bringing the total distance it has driven since arriving on Mars in August 2012 to some 5.21 kilometres (3.24 miles).
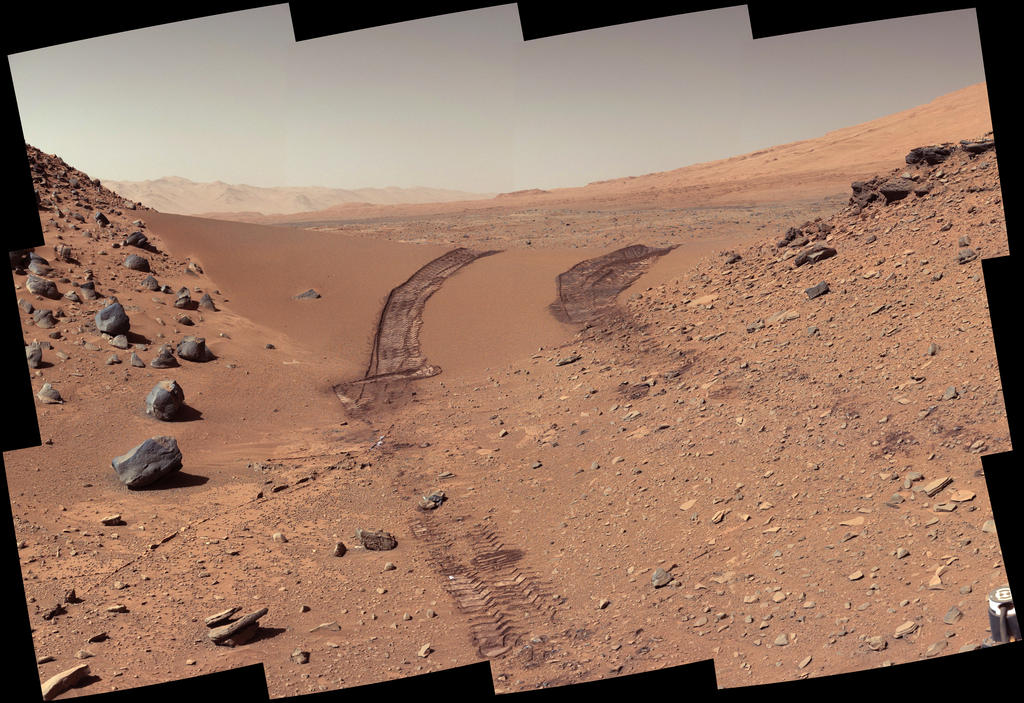
Casting a long shadow: a black-and-white Navcam image captured by Curiosity at the end of its 100-metre reverse drive on Sol 547 (February 18th, 2014). The linear markings near the rover’s shadow are not wheel marks but surface patterns in the ground over which it is travelling (click to enlarge)
With the reverse driving now proven, Curiosity is set to resume its primary mission, which will see it make its way to an area previously referred to as “KMS-9”, comprising three different terrain / rock types offer a relatively dust-free area, and which has now been renamed “Kimberley” after a region in north-western Australia noted for its ancient, exposed rocks.
Following the February 18th drive, Curiosity faced a 1.1 kilometre curving trek to reach “Kimberley”. Once there, the rover will stop there to conduct further science activities, including gathering further rock samples using the turret-mounted drill. At the same time, mission managers will use orbital imagery to select the preferred route the rover will be instructed to take in order to continue onwards to its primary destination: the lower slopes of “Mount Sharp”.
“We have changed our focus to look at the big picture for getting to the slopes of Mount Sharp, assessing different potential routes and different entry points to the destination area,” Erickson said, commenting on the need to reassess the route. “No route will be perfect; we need to figure out the best of the imperfect ones.”
Reaching Kimberley: the white line marks Curiosity’s route. Prior to cross “Dingo Gap” (top right), the rover’s route would have been more-or-less directly to “Kimberley” (lower left). Since crossing the dune onto smoother terrain, the rover has travelled some 100 metres (to “547”), with the yellow line showing the revised route to “Kimberley” the rover will be negotiating (click to enlarge)
It is not clear how long the rover will remain at “Kimberley” once it arrives there; part of this decision will likely only be made once the rover have been able to survey the area for itself.
Last time around, I mentioned that the Curiosity team was looking at alternative routes to get the rover down to the crossing-point for the start of its explorations of “Mount Sharp” at the centre of Gale Crater and, more immediately, to a target of interest for further science studies.
The desire to seek alternative routes came as a result of periodic examinations of Curiosity’s aluminium wheels revealing they’d suffered more wear and tear during recent traverses of very rough terrain than had been anticipated. While not a threat to the rover, mission managers would still prefer to lessen the impact of the rover’s southerly transit over what has proven exceptionally rugged ground.
At the time of writing that last update, planners were considering taking Curiosity over a sand dune roughly a metre (3 feet) in height sitting between two rocky scarps, as the terrain beyond the dune, dubbed “Dingo Gap”, appeared to be markedly less rough. While a little more circuitous than a direct-line drive, crossing the dune would still allow the rover to get to its next target for taking samples, a rocky outcrop dubbed “KMS-9″.
The view over “Dingo Gap”, captured on Sol 528 (January 30th, 2014), shows a westward-leading valley of much smoother terrain compared to the rover’s recent drives. The largest of the dark rocks on the sand to the right of the scene are about 60 cm (2 feet) across. This image was captured via Curiosity’s Mastcam and is shown unprocessed: the colours are as the human eye would see them on Mars under local daylight conditions (click to enlarge)
While other routes were under consideration as well, it was decided to take Curiosity “Dingo Gap” after it had been ordered to drive up to the base of the dune and take a peep directly over the top of the mound to get a detailed view of the land on the other side. The rover actually made the crossing on Sol 535 (February 6th), and a series of nine black-and-white images captured by the rear hazard-avoidance cameras (Hazcams) were later strung together to form a short video of the crossing.
series of nine images captured by the rover’s rear Hazcams show progress over “Dingo Gap”. At the start of the sequence, Curiosity’s front wheels were on the base of the dune’s slope, and the entire traverse covered a distance of some 7 metres (23 feet) – click to enlarge
With the crossing made, Curiosity is set to travel to “KMS-9”, something over half a kilometre away, and which comprises three different terrain / rock types offer a relatively dust-free area for examination and further drilling operations. The area is one of the number of potential “waypoints” identified from orbit that missions scientists hope will help provide greater insight in the soil, rock and climatic conditions which may have once existed around “Mount Sharp” and help build up a clearer picture of changes in conditions which may have occurred within the region through which the rover is travelling.
The progress of NASA’s Curiosity rover on Mars has slowed somewhat in January, the rover having covered around 265 metres (865 feet) in the month, bringing the total distance Curiosity has travelled since arriving on Mars in august 2012 to some 4.89 kilometres (3.04 miles).
Part of the reason for the slow-down has been due to the recent traverse of considerably rougher terrain during the rover’s trek towards its encounter with “Mount Sharp” having resulted in somewhat more wear-and-tear of the aluminium wheels than had perhaps been anticipated.
While not of a serious concern – the rover can function with quite substantial damage having being done to the wheels – the mission team has nevertheless been looking for ways and means for the rover’s progress to continue at a reasonable pace, but without exposing the wheels to excessively rugged terrain.
Most recently, this has involved examining a possible gateway to a smoother route down to the point at which they plan to commence explorations of “Mount Sharp’s” lower slopes. This gateway is a 1-metre (3-ft) high sand dune sitting between two rocky scarps. Dubbed “Dingo Gap”, the dune appears to provide access to a smoother route heading south-west and towards the rover’s ultimate destination.
Dingo Gap, imaged on Sol 526 (January 28th, 2014). Taken by the “left eye” of Curiosity’s Mastcam, this mosaic shows the metre high dune in the upper centre of the picture, sitting between two rocky scarps and about 35 metres (115 ft) from the rover. The far horizon of the image is the wall of Gale Crater (click to enlarge)
“The decision hasn’t been made yet, but it is prudent to go check,” said Jim Erickson, NASA’s project manager for Curiosity. on January 28th. “We’ll take a peek over the dune into the valley immediately to the west to see whether the terrain looks as good as the analysis of orbital images implies.” The orbital images he referred to came from the High Resolution Imaging Science Experiment (HiRISE) camera on NASA’s Mars Reconnaissance Orbiter, while the “closer look” actually took place on January 30th.
In addition to using alternative routes, the drive team has also been evaluating possible driving techniques that might help reduce the rate of wheel punctures, such as driving backwards or using four-wheel drive instead of six-wheel drive. This may help is situations where some of the wheel damage may have resulted from the force of the rear wheels pushing the middle or front wheels against sharp rocks, rather than simply the weight of the rover driving over the rocks.
As a result of the slow-down, JPL are considering introducing some evening and weekend drives into the February drive schedule.
A mosaic showing Dingo Gap (foreground) and the terrain beyond, as imaged by Curiosity’s monochrome Navcams on Sol 528 (January 30th, 2014) – click to enlarge
More Drilling
As well as providing a route southwards, Dingo Gap may also allow the rover easier access to its next waypoint on the journey, where it is expected to carry out further drilling and sample-gathering activities. The site, identified as “KMS-9” is around 800 metres (half-a-mile) from Curiosity’s current position when measured in a straight line – but that is over rugged terrain the mission team would potentially avoid if possible.
The drilling site has been imaged from orbit, and holds significant appeal to the mission team, as Katie Stack, a science team collaborator explained. “At KMS-9, we see three terrain types exposed and a relatively dust-free surface. This area is appealing because we can see terrain units unlike any that Curiosity has visited so far. One unit has striations all oriented in a similar direction. Another is smooth, without striations. We don’t know yet what they are. The big draw is exploration and seeing new things.”
“KMS-9” won’t be the first rocky area examined by Curiosity in 2014. On January 15th, the rover examined a rock dubbed “Harrison”, which revealed linear crystals with feldspar-rich composition.
Earth-side Tests
At the same time as the efforts to select a candidate route have been underway, other members of the team have been carrying out further tests to validate capabilities for the rover to drill for rock samples on the kind of slopes it will likely encounter when exploring and climbing “Mount Sharp”.
In particular, the tests have been focused on the drill mechanism’s ability to withstand damage as a result of slippage when the rover is parked on a sloping surface. So far, results have shown that the drill mechanism can withstand slippage of around 5 centimetres (2 inches) in the rover’s position without any real damage occurring. Such slippage could be induced through a number of circumstances, including the angle of slope, cumulative damage to the wheels which may impact their ability to grip the surface beneath them, and material on the surface which may also impact the rover’s ability to sustain a solid grip on underlying rock.
Curiosity, the NASA rover carrying the Mars Science Laboratory is continuing towards its rendezvous with the foothills of “Mount Sharp” (Aeolis Mons) in Gale Crater, Mars. As such, there is little coming out of NASA in terms of updates on progress (which would likely sound the robotic equivalent of “Are we there yet?” “No!” cycles).
However, on January 9th, NASA released several images captured by the High Resolution Imaging Science Experiment (HiRISE) camera aboard the Mars Reconnaissance Orbiter (MRO). Taken in both black-and-white and colour, these show Curiosity’s long and lonely drive across the “magnificent desolation” of Gale Crater.
Tracking Curiosity’s progress towards “Mount Sharp” – the arrows point towards to tracks left by the rover as it heads southwest towards a gap in the dune field (seen lower right) sitting between it and the foothills of its primary destination. For scale, the wheel tracks are about 3 metres (10 feet) apart (click to enlarge)
The images show the rover’s tracks as it manoeuvred around obstacles on its route toward the lower slopes of “Mount Sharp”, and were captured in early December 2013 as the MRO, which acts the and primary communications relay between Earth and Curiosity, passed over the rover’s location at an altitude of some 250-316 kilometres (160-196 miles).
HiRISE first imaged the Mars Science Laboratory spacecraft while it was descending on a parachute to place Curiosity on Mars 17 months ago. Since then, it has provided updated views of the rover’s traverse, as seen from orbit.
A rover’s progress: a large image of Curiosity’s journey, as captured by the HiRISE camera aboard the Mars Reconnaissance Orbiter in December 11th, 2013. The rover itself is just out of frame to the lower left of the image. The orientation is so that north is to the top (click to enlarge)
At the time the images were captured, Curiosity had clocked-up some 4.61 kilometres (2.86 miles) since its arrival in Gale Crater in August 2012. The long trek in a generally southwest direction commenced in the latter half of 2013, after the rover had spent some six months within the “Glenelg” and “Yellowknife Bay” areas of the crater studying a range of rock and surface conditions which allowed Curiosity to meet criteria relevant to its primary mission objective – to determine whether Mars may have once harboured conditions in which life might have arisen.
NASA’s Curiosity Mars rover and tracks left by its driving appear in this portion of a Dec. 11, 2013, observation by the Mars Reconnaissance Orbiter. The rover is near the lower-left corner of this view. For scale, the two parallel lines of the wheel tracks are about 3 metres (10 feet) apart (click to enlarge)
 Curiosity officially reached its next planned waypoint – dubbed “the Kimberley” on Wednesday April 2nd, 2014, with a final drive of some 30 metres (98 feet), after detouring from its planned drive route to reduce the amount of wear and tear being suffered by the rover’s aluminium wheels, the result of traversing some particularly rough terrain for several months.
Curiosity officially reached its next planned waypoint – dubbed “the Kimberley” on Wednesday April 2nd, 2014, with a final drive of some 30 metres (98 feet), after detouring from its planned drive route to reduce the amount of wear and tear being suffered by the rover’s aluminium wheels, the result of traversing some particularly rough terrain for several months.